






基于stm32芯片仿真的倒车测距提示系统
包含演示视频 报告 proteus仿真 keil代码
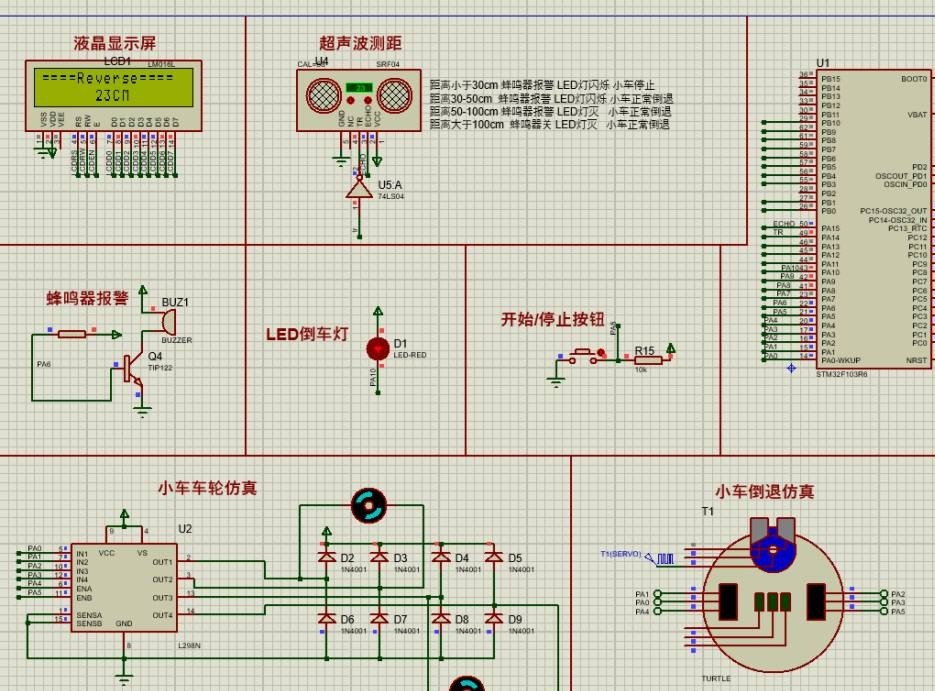
以stm32为最小系统电路进行连接,按钮控制系统开关,使用SRF04采集倒车,LM016L液晶显示屏显示汽车距离障碍物的实时距离。
当距离障碍物大于100cm时,小车自由倒退,蜂鸣器、LED提示灯关闭,车辆正常倒退;当距离障碍物大于50cm小于100cm时,蜂鸣器报警,LED灯关闭,车辆正常倒退;当距离障碍物大于30cm小于50cm时,蜂鸣器报警,LED灯闪烁提示,车辆正常倒退;当距离障碍物小于30cm时,蜂鸣器报警,LED灯关闭,小车停止。
ID:5419695873130198
我长不高了
基于stm32芯片仿真的倒车测距提示系统
为了提高汽车倒车时的安全性,倒车测距提示系统应运而生。本文将介绍一种基于STM32芯片的倒车测距提示系统,并详细讲解系统的硬件连接和代码实现。
系统的最小系统电路采用了STM32芯片,通过按钮来控制系统的开关。同时使用SRF04超声波传感器来采集倒车时的距离,并通过LM016L液晶显示屏实时显示距离障碍物的实际距离。
系统的工作原理如下:当距离障碍物大于100cm时,小车会自由倒退,此时蜂鸣器和LED提示灯都会关闭,车辆可以正常倒退。当距离障碍物大于50cm且小于100cm时,蜂鸣器会发出报警声,LED灯关闭,车辆仍然可以正常倒退。当距离障碍物大于30cm且小于50cm时,蜂鸣器会不断报警,LED灯会闪烁提示,车辆仍然可以正常倒退。当距离障碍物小于30cm时,蜂鸣器会持续报警,LED灯会关闭,小车停止倒退。
系统的硬件连接非常简单,只需要将SRF04超声波传感器连接到STM32芯片的相应引脚,然后通过LM016L液晶显示屏来显示距离信息即可。
在代码实现方面,我们可以使用Keil软件来编写STM32的代码。首先,需要初始化相应的IO口和串口通信。然后,使用定时器来产生触发信号,并通过捕获功能来测量回波信号的时间,从而计算出距离。根据距离的大小,可以控制蜂鸣器和LED的状态。
为了验证系统的正常工作,我们可以使用Proteus软件进行仿真。在仿真过程中,我们可以通过演示视频来展示整个倒车测距提示系统的工作过程。
通过本文的介绍,我们详细讲解了基于STM32芯片的倒车测距提示系统的原理、硬件连接和代码实现。该系统可以通过SRF04超声波传感器来测量距离,并通过LM016L液晶显示屏、蜂鸣器和LED灯来进行距离提示。系统能够根据距离的大小,智能控制车辆的行驶状态,提高倒车时的安全性。
通过对该系统的仿真和实验验证,我们可以得出结论:该倒车测距提示系统能够有效地帮助驾驶员进行倒车操作,提醒驾驶员注意距离障碍物的安全距离,减少事故的发生概率。
总之,基于STM32芯片的倒车测距提示系统是一种非常有价值的技术应用。它通过硬件连接和代码实现,能够智能地控制车辆的倒车行驶状态,提高了倒车时的安全性。这一系统的研发和应用对于汽车行业具有重要意义,并且有着广泛的发展前景。
【相关代码,程序地址】:http://fansik.cn/695873130198.html
















 4666
4666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









