






基于A* 算法的无人机三维路径规划算法,可以动态避障,自己可以规定设计障碍物位置,MATLAB编程实现
YID:419772951761070
可惜没如果
基于A*算法的无人机三维路径规划算法在无人机领域具有重要的应用价值。该算法通过动态避障和自定义障碍物位置,实现了对无人机飞行路径的规划与优化。本文将针对该算法进行详细分析与讨论,并通过MATLAB编程实现验证其有效性。
路径规划是无人机飞行控制中的核心问题之一。传统的路径规划方法往往仅考虑平面环境下的飞行路径,无法对三维空间中的动态障碍物进行有效避让。而基于A*算法的无人机三维路径规划算法能够克服这一困难,使得无人机具备了自主智能避障的能力。我们通过对该算法的详细分析,可以更好地理解其原理与实现。
A算法,即A星算法,是一种启发式搜索算法,常用于寻找最短路径。它通过评估当前节点的代价函数综合考虑了路径长度和启发式函数的路径估计,从而使得搜索过程更加高效。在无人机三维路径规划中,A算法被应用于节点的选择和路径的搜索过程,能够快速找到一条最优路径。
动态避障是无人机飞行中至关重要的一环。传统的避障算法通常基于静态环境假设,无法应对动态障碍物出现的情况。而基于A*算法的无人机三维路径规划算法通过实时更新环境信息,能够快速响应障碍物的变化,并及时调整飞行路径,以保证无人机的安全与稳定。
此外,该算法还允许用户自行定义障碍物的位置。这一特性使得无人机路径规划具备更高的灵活性和可定制性,能够适应不同场景下的要求。无人机的无人驾驶特性得以进一步强化,使其能够在复杂环境中执行精确的飞行任务。
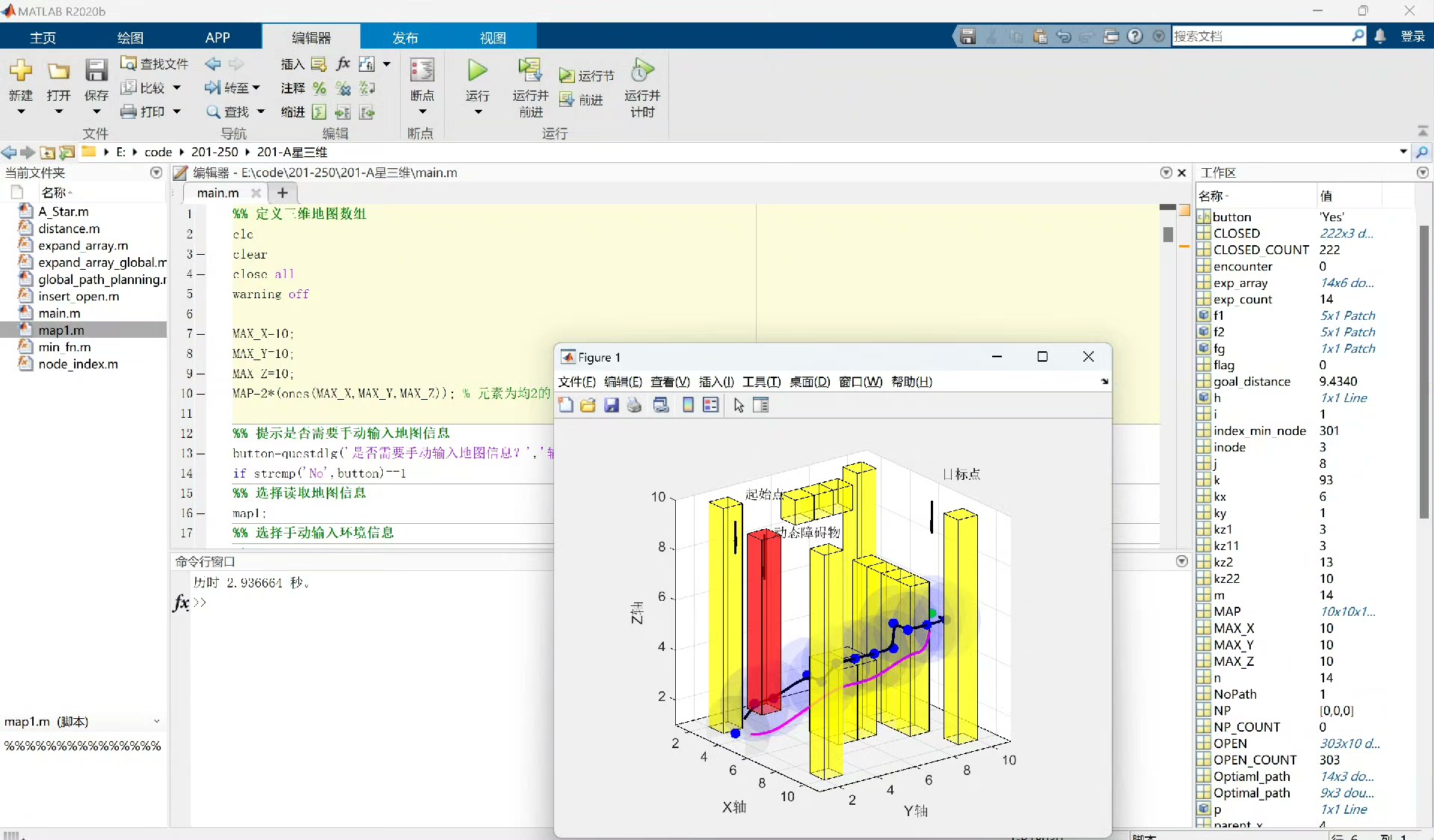
为了验证基于A*算法的无人机三维路径规划算法的有效性,我们选择MATLAB作为编程工具进行实现。MATLAB具有强大的数学计算和仿真功能,能够帮助我们更加直观地观察算法执行过程和结果。通过调用MATLAB提供的相关函数和工具箱,我们可以构建飞行环境、设定障碍物位置以及进行路径规划的模拟实验。实验结果表明,该算法能够准确地规划无人机的飞行路径,并成功避开动态障碍物,验证了算法的有效性和实用性。
综上所述,基于A*算法的无人机三维路径规划算法具备动态避障和自定义障碍物位置的能力,能够在复杂环境中实现无人机的智能飞行。通过MATLAB编程实现的实验验证了算法的有效性。该算法对于无人机在安全、稳定和精确性方面的要求具有重要的意义,有望在无人机领域得到广泛应用。未来的工作可以进一步优化算法实现和提升性能,以满足不同应用场景的需求。相信随着技术的不断进步,无人机三维路径规划将迎来更加广阔的发展前景。
相关的代码,程序地址如下:http://nodep.cn/772951761070.html
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









