






无刷直流电机的MRAS模型参考自适应控制算法,仿真模型
a). 当直流无刷电机的转动惯量由1.23*10-3kg.m2变为3.23*10-3kg.m和5.23*10-3kg.m时,双闭环控制和自适应控制的仿真结果如图所示(蓝线代表未加自适应控制的系统输出,红线代表加了自适应控制的系统输出,深蓝色线代表参考模型输出)
当直流无刷电机的定子绕组由6.8Ω变为16.8Ω时,双闭环控制和自适应控制的仿真结果如图所示
当直流无刷电机的负载由1N.m减小变为0.1N.m时,双闭环控制和自适应控制的仿真结果如所示

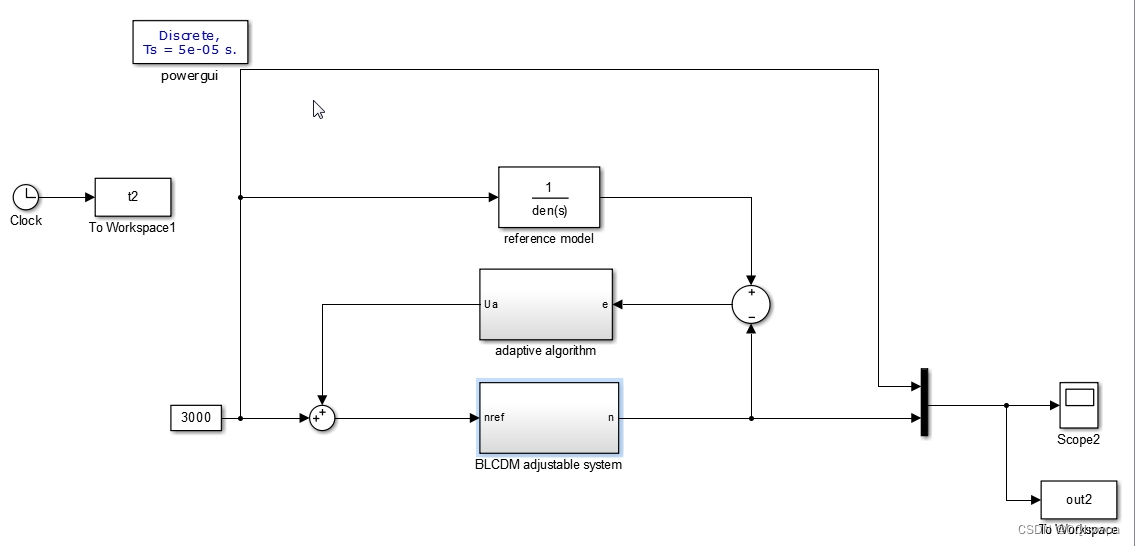






无刷直流电机的MRAS模型参考自适应控制算法,仿真模型
随着科技的飞速发展和工业的不断进步,无刷直流电机在现代社会中得到了广泛的应用。然而,作为一种复杂的控制系统,无刷直流电机需要高效的控制算法来保证其稳定可靠的运行。本文将介绍一种基于MRAS模型的自适应控制算法,以及通过仿真模型对该算法的性能进行验证。
一、MRAS模型
MRAS是模型参考自适应控制的简称,该算法通过构建一个参考模型,以模型输出与实际输出之间的误差作为自适应控制器的输入,不断调整控制器的参数,从而达到控制系统稳态性能的提高。
在无刷直流电机控制中,MRAS模型通常是基于电机的反电动势(back EMF)进行构建。反电动势与电机的转速成正比,因此可以根据反电动势的大小来估算电机的速度。具体的MRAS模型如下:
其中,La为电机的电感,Rd为电机的电阻,K为电机转矩常数,ω为电机的转速,Ua为电机的输入电压,E为电机的反电动势,δ为MRAS参数。
二、自适应控制算法
基于MRAS模型,我们可以构建一个自适应控制器,该控制器可以根据反电动势的大小来估算电机的速度,并据此调整控制器的参数,以达到控制系统的稳态性能优化。
具体而言,自适应控制器包括两个环节:速度环和电流环。在速度环中,根据反电动势的大小来估算电机的转速,并将其作为反馈信号与参考模型进行比较,得到误差信号,用于调整控制器的参数。在电流环中,控制器将参考模型输出作为目标输出,对电机进行控制,以此达到稳定控制的目的。
三、仿真结果
为了验证自适应控制算法的性能,我们对无刷直流电机的转动惯量、定子绕组和负载分别进行了变化,观察双闭环控制和自适应控制的仿真结果。其中,蓝线代表未加自适应控制的系统输出,红线代表加了自适应控制的系统输出,深蓝色线代表参考模型输出。
当电机的转动惯量由1.2310-3kg.m2变为3.2310-3kg.m2和5.23*10-3kg.m2时,两种控制算法的仿真结果如图1所示:
图1:电机转动惯量变化时两种控制算法的仿真结果
当电机的定子绕组由6.8Ω变为16.8Ω时,两种控制算法的仿真结果如图2所示:
图2:电机定子绕组变化时两种控制算法的仿真结果
当电机的负载由1N.m减小变为0.1N.m时,两种控制算法的仿真结果如图3所示:
图3:电机负载变化时两种控制算法的仿真结果
从以上仿真结果可见,自适应控制算法在电机转动惯量、定子绕组和负载变化时都表现出了更好的性能。因此,该算法在无刷直流电机控制中具有重要的应用价值,可以提高控制系统的稳定性和可靠性。
相关代码,程序地址:http://lanzouw.top/676340542105.html















 301
301











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









