







 超级会员免费看
超级会员免费看
实验1:利用ROI建立样本训练集和验证集
目的:学会利用ROI建立计算机分类时的样本集
过程:
①导入影像:打开ENVI,选择“打开→打开为→光学传感器→ESA→Sentinel-2”,将Sentinel-2影像导入到ENVI平台中。
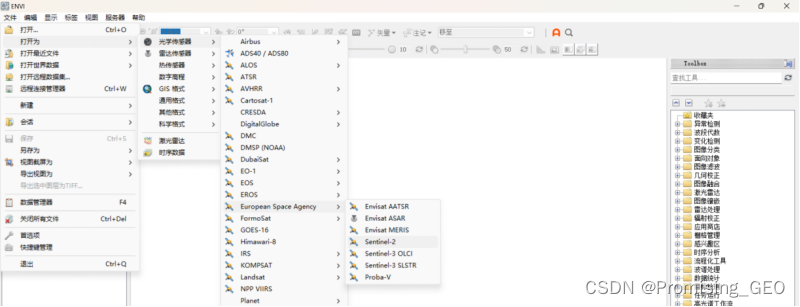
图1
②建立ROI区域:选择ROI工具,在影像中寻找一个包含植被、水体、建筑和道路等主要地物的区域,绘制矩形,
实验1:利用ROI建立样本训练集和验证集
目的:学会利用ROI建立计算机分类时的样本集
过程:
①导入影像:打开ENVI,选择“打开→打开为→光学传感器→ESA→Sentinel-2”,将Sentinel-2影像导入到ENVI平台中。
图1
②建立ROI区域:选择ROI工具,在影像中寻找一个包含植被、水体、建筑和道路等主要地物的区域,绘制矩形,
 1345
1345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























