






一、实验任务
(1)图像至图像的几何校正;
(2)图像至地图的几何校正;
(3)已知几何信息的几何校正。
二、实验原理
(1)几何校正、几何配准原理
遥感图像的几何校正分为几何粗校正和几何精校正两种。几何粗校正是根据产生畸变的原因,利用空间位置变化关系,采用计算公式和取得的辅助参数进行的校正。几何精校正是指使图像的几何位置符合某种地理坐标系统,并调整亮度值,即利用地面控制点做的精密校正。
几何配准与几何校正的原理是完全相同的,即都涉及到空间位置(像元坐标)变换和像元灰度值重采样处理两个过程,二者的区别主要在于其侧重点不相同:几何校正注重的是数据本身的处理,目的是为了对数据的一种真实性还原,而几何配准注重的是图和图(数据)之间的一种几何关系,其目的是为了和参考数据达成一致,而不考虑参考数据的坐标是否标准、是否正确。
在实际操作中几何校正和几何配准的技术流程是一样的。无论是两个几何校正还是几何配准,需要两幅图像,一幅图像作为基准(base image),另一幅图像是待校正或待配准的变形图像(warp image)。基准图像(base image)必须有标准的地图投影或RPC信息,它不能是基于像素的、任意的投影或伪投影,变形图像(warp image)则没有限制。
(2)图像至图像的几何校正原理
图像至图像的几何校正利用具有已知地理信息的基准图像进行控制点选取,在基准图像和畸变图像上选取相同目标物,建立起基准图像与畸变图像之间的图像坐标转换关系,再利用基准图像的实际坐标投影信息对畸变图像进行几何校正。
①同名点匹配:通过寻找两幅遥感图像上的同名点(如地物的角点、边界点等),利用数学模型,如仿射变换模型等,建立起这些同名点之间的坐标转换关系,从而对图像进行校正,使得一幅图像的几何形状与另一幅图像匹配;
②误差最小化:采用最小二乘法等优化算法,最小化同名点坐标转换后的误差,以提高校正的精度。
(3)图像至地图的几何校正原理
图像至地图的几何校正与图像至图像的几何校正基本类似,但控制点的选择方式更加灵活。控制点可以通过具有地理坐标信息的栅格图像、矢量图像、文本文件导入,也可以从纸质地图、GPS测量数据中读取,通过键盘手动输入坐标信息。
①坐标系统转换:利用已知的地图投影信息和地面控制点(GCPs),建立从图像坐标到地图坐标的转换关系,如多项式变换等数学模型;
②地理定位:通过控制点确定图像在地理空间中的准确位置,使得图像中的地物能够准确地对应到地图上的地理位置,从而实现图像至地图的几何校正。
(4)已知几何信息的几何校正原理
这种校正一般是通过输入几何文件(Input Geometry,IGM)和地理位置查找表文件(Geographic Lookup Table,GLT)来实现。这种方法适用于遥感图像已经附带了一定的几何信息,可以通过这些信息来校正图像,使其与地理坐标系统对齐。
①利用先验几何信息:如果已经知道遥感图像的一些几何信息,例如传感器的姿态参数(如卫星的轨道参数、传感器的倾斜角度等)、成像几何模型等,可以根据这些已知的几何信息建立精确的数学模型,直接对图像进行几何校正,使得图像符合真实的地理几何关系;
②模型驱动校正:以这些已知的几何信息为基础构建的数学模型(如严格成像几何模型)驱动校正过程,将图像中的像元准确地映射到地理空间中的正确位置。
三、实验数据与软件
实验数据:bldr_sp.img;bldr_tm.img;cup99hy_true.img;cup99hy_geo_igm
软件:Envi 5.6
四、实验方法与步骤
1.图像至图像的几何校正
1.1 打开和显示地理参考数据
【File】→【Open】,选择“bldr_sp.img”文件图像自动加载到显示窗口中。
图1 打开影像
1.2 在ENVI文件中查看地图信息
1)【Data Manager】→选择“bldr_sp.img”文件,右键→【View Metadata】→【Map info】,基本地图信息展示在对话框中;
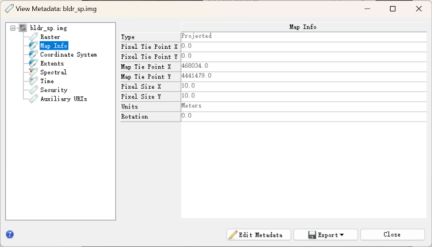
图2 查看元数据
2)【Edit Metadata】→点击【UTM Zone 13 N】后的按钮,查看地图投影的纬度/经度坐标。
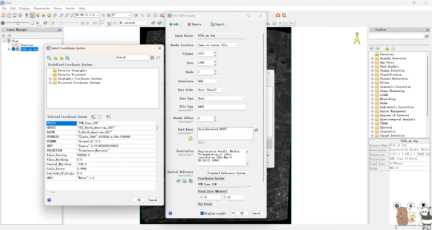
图3 查看编辑元数据对话框
1.3 显式光标位置和参数
1)点击【Course Value】工具,显示光标位置、地理参考图像的像素坐标和地理参考坐标,以及地图坐标和经纬度之间的关系。在图像上移动鼠标光标,滚动或缩放窗口,观察对话框中显示的位置和数据值信息;
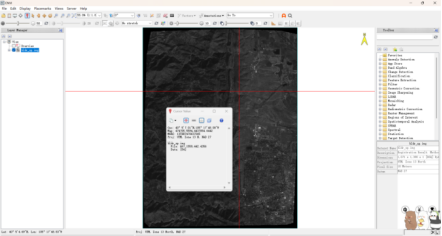
图4 查看文件数据值信息
2)关闭【Cursor Value】对话框。将具有地理参考的SPOT图像作为基准图像,Landsat TM影像作为待配准图像。待匹配图像如果没有地理参考,需要利用【Image Registration Workflow】工具选择控制点并完成校正。
1.4 利用Image Registration Workflow自动配准
1)【File】→【Open】,选择“bldr_tm.img”文件和“bldr_sp.img”文件,数据将自动显示在视窗中。选择【Linear 2%】,增强两幅图像显示;
2)【Geometric Correction】→【Registration】→【Image Registration Workflow】,弹出【Image Registration】对话框。【Base Image File】选择“bldr_sp.img”文件,【Warp Image File】选择“bldr_tm.img”文件,单击【Next】,出现【Tie Points Generation】列表框;
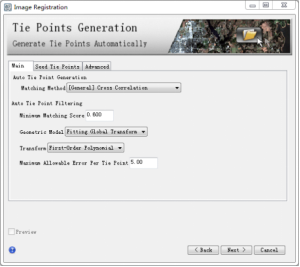
图5 生成控制点对话框
3)在【Main】选项卡中各项设置选择默认设置。点击【Seed Tie Points】→【Start Editing】,首先在基准图像中单击标注匹配点,然后右击并选择【Accept as Individual Points】。当图像窗口自动转换到另一幅图像,即变形影像,在图像上标记相应的匹配点之后右击并选择【Accept as Individual Points】。匹配点的个数会更新,且图像窗口视图会自动返回到第一幅图像;
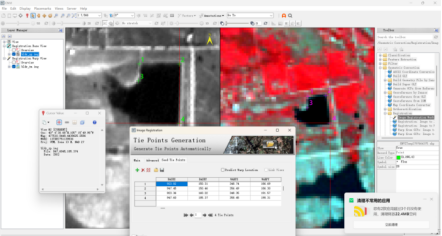
图6 控制点选择窗口
4)以相同的方式在两幅图像中选出至少三个对应控制点,点击【Next】,系统自动生成匹配点,弹出【Review and Warp】对话框,并且在基准图像和待配准图像的重叠区处显示匹配点。基准图像上的匹配点显示为品红色。在对话框中单击【Switch to Warp】,观察待配准图像上相应的绿色匹配点;
5)单击【Show Table】→【Tie Points Attribute Table】,表中列出了所有匹配点的详细信息,如匹配点在基准图像的位置(BASEX、BASEY)、待配准图像上的位置(WARPX、WARPY)、分值(SCORE)和误差(ERROR),以及匹配点的均方根误差(RMS)。单击【Next】,弹出【Export】对话框。选择输出文件格式Envi或TIFF,设置输出路径,得到校正影像和控制点文件;
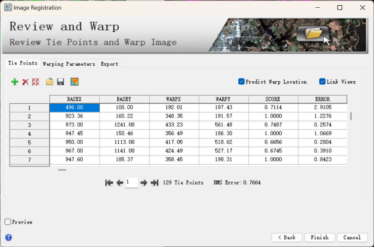
图7 控制点列表
6)检查和编辑自动生成匹配点:检查匹配点精度最好方法是在视图中目视检查匹配点的位置。如果增加或删除匹配点,误差值会得到更新。如果匹配点的位置特征在两幅图像上无法匹配,则按【Delete】删除该点。在【Tie Points】中,单击【ERROR】选择该列,右击,选择【Sort by Selected Column Reverse】。误差最高的匹配点显示在表格顶部,可以直观的查看误差最大的匹配点,找到匹配点列表中精确度较低的匹配点点号,右键点击【Delete Tie Point】进行删除。
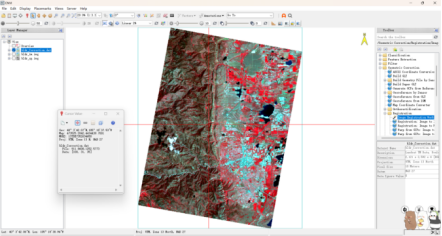
图8 检查和编辑自动生成匹配点
1.5 利用Registration: Image to Image进行校正
1)启动图像配准并加载地面控制点;
①【Geometric Correction】→【Registration】→【Registration:Image to Image】,弹出【Select Input Band from Base Image】对话框。【Georeferenced SPOT】→【Select Input Warp File】,选择“bldr_tm.img”文件,选择所需匹配波段Band 6。在弹出ENVI警告时单击【yes】,弹出【Select Existing Tie Points File】对话框;
②选择现有控制点文件中选择既有的控制点文件,自动校正参数均为默认,点击【OK】,弹出【Ground Control Points Selection】对话框,【Show List】→【Image to Image GCP List】;
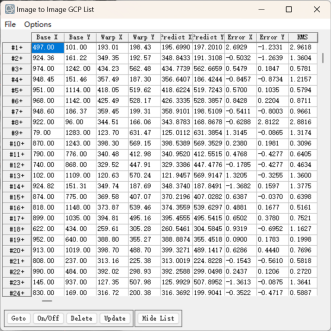
图9 图像至图像GCP列表
③要隐藏GCP 列表,在【Ground Control Points Selection】对话框中点击【Hide List】。
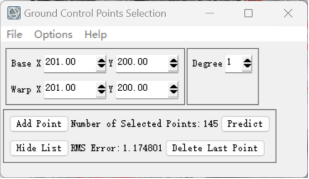
图10 地面控制点选择对话框
2)GCPs的使用;
①单击【Image to Image GCP List】对话框中的单个GCP,检查两幅影像中点的位置、实际坐标、预测坐标、RMS误差。调整对话框的大小来观察地面控制点选择对话框中列出的总RMS误差;

图11 根据图像至图像GCP列表调整影像
②RMS误差最小化
从【Ground Control Points Selection】对话框中了解已选GCPs 数量,【Options】→【Order Points by Error】,将误差最大的点显示在列表顶部。配准过程中可以选择性地忽略某些控制点,点击【On/Off】按钮,在不考虑所选忽略点的情况下对RMS误差和空间变换进行重新计算,GCP 列表中被忽略点的旁的“+”号变为“-”号,GCP 标记的颜色也将发生改变;
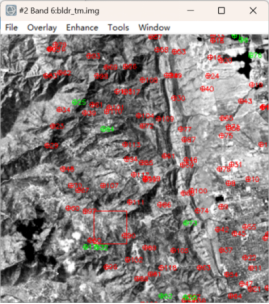
图12 GCP 标记的颜色发生改变
③控制点定位
将缩放窗口定位到任何所选的控制点处,在GCP列表中直接点击所需GCP的序号。基准图像和纠正图像的缩放窗口都将移动在所选GCP处,标记位于缩放窗口的中心;
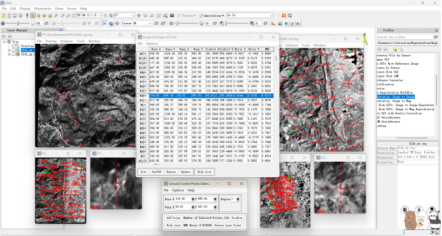
图13 控制点定位
④编辑GCP位置并删除
交互式地移动GCP的位置,在基准图像与纠正图像中重新定位缩放窗口。点击GCP列表【Update】按钮,在GCP列表和两幅图像中,所选GCP位置将被新的GCP位置代替,两幅图像的缩放窗口也聚集在新位置处。从GCP 列表中永久删除任意一个单独控制点,点击要删除的控制点,然后点击【Delete】;
3)校正图像;
①【Ground Control Point Selection】→【Options】→【Warp Displayed Band】→【Method】,下拉列表,然后选择【RST】;
②确保【Resampling】列表中的【Nearest Neighbor】选项被选择,【Enter Output Filename】设置文件名“bldr_tm1.wrp”,配准完成后的影像将显示在视窗中;
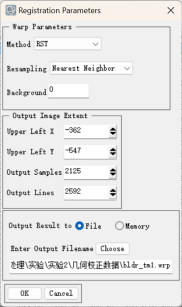
图14 校正对话框
③再次打开【Registration Parameters】对话框。单击【Method】,选择【RST】;单击【Resampling】,选择【Bilinear】;在【Enter Output Filename】设置文件名“bldr_tm2.wrp”,配准完成后的影像将显示在视窗中;
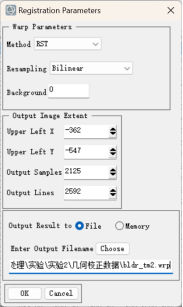
图15 校正对话框
④使用RST方法和Cubic Convolution重采样重复步骤上述步骤,然后命名输出文件“bldr_tm3.wrp”;
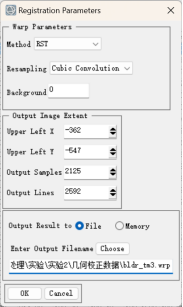
图16 校正对话框
⑤使用Polynomial方法和Cubic Convolution重采样重复上述步骤,然后命名输出文件“bldr_tm4.wrp”。
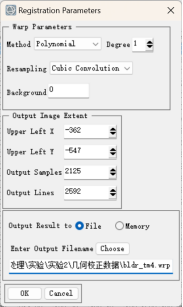
图17 校正对话框
4)校正结果比较。
①打开参考影像SPOT影像以及校正后的TM影像并显示;
②选择主菜单中的【View Blend】、【View Flicker】和【View Swipe】的其中之一,使用动态覆盖来比较SPOT影像和TM影像;
图18 视图混合比较SPOT影像和TM影像
③采用同样的方法,比较最邻近法、双线性插值法和三次卷积法三种不同重采样方法得到的校正结果。
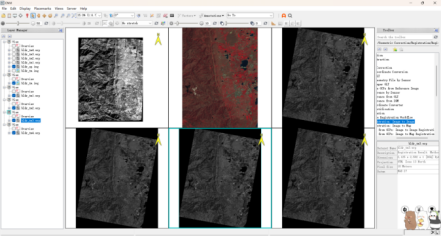
图19 比较三种不同重采样方法得到影像
采用最邻近法重采样的图像中出现像素缺失的点,双线性插值图像看起来更平滑,三次卷积法图像是最好的结果,其更为平滑保留了细节。
2.图像至地图的几何校正
2.1 打开和显示矢量文件
【File】→【Open】,选择带有地理参考的道路地图矢量文件“bldr_rd.shp”,文件将自动加载到视窗。
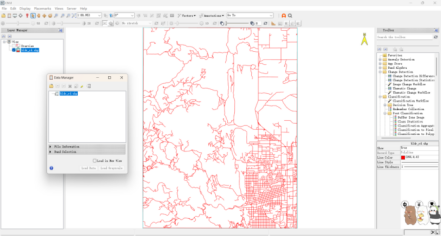
图20 带有地理参考的道路地图矢量文件
2.2 打开和显示Landsat TM影像文件
【File】→【Open】,选择“bldr_tm.img”文件,文件将自动加载到视窗。
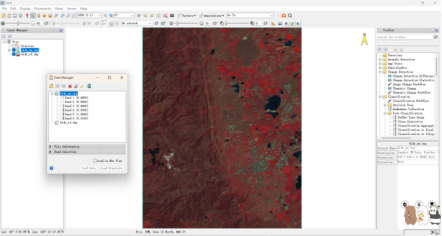
图21 打开和显示Landsat TM影像文件
2.3 选择图像到地图的配准并恢复GCPs
1)【Geometric Correction】→【Registration】→【Registration : Image to Map】,出现【 Select Image Display Bands Input Bands】对话框,任意选择选择3个波段后弹出【Image to Map Registration】对话框,且出现Zoom、Image和Scroll三个窗口的视窗组合;
2)【Select Registration Projection】选择【UTM】投影类型,由于该区域位于UTM投影北13区,所以【Zone】栏输入“13”;
3)待校正的图像是TM多光谱影像,其原始分辨率是30米,所以【X/Y Pixel Size】栏输入“30.0”米,单击【OK】开始配准;
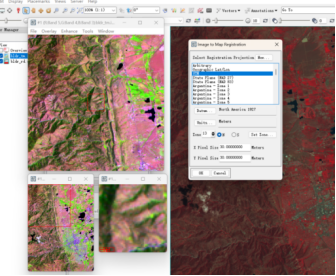
图22 图像到图像配准对话框
4)没有控制点的情况下,通过人机交互来选择控制点。基准是已打开的道路矢量文件,打开【Cursor Value】并打开十字交叉丝,在视图中读取相应点的坐标;
5)点击【Zoom to Selected】,将待校正图像定位在适合选择地面控制点的区域。左键单击特定像素将光标定位在该像素或该像素的一部分上,选定位置的坐标出现在【Ground Control Points Selection】对话框中的【Image x】和【Image y】字段;
6)点击矢量文件中对应位置,以经度和纬度的形式输入地图GCP的位置,点击地图投影名称【Proj】旁边的切换按钮并为【Lat】和【Lon】字段处输入数值;
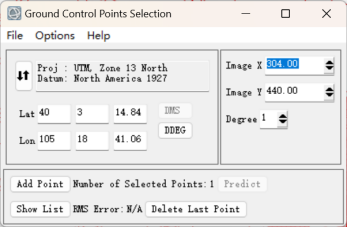
图23 地面控制点对话框
7)由于已有控制点,因此从【Ground Control Points Selection】对话框菜单栏中,选择【File】→【Restore GCPs from ASCII】。选择“bldrtm_m.pts”文件,【Ground Control Points Selection】→【Show List】,弹出【Image to Map GCP List】对话框,检查基准地图坐标、实际跟预测图像坐标及RMS误差。
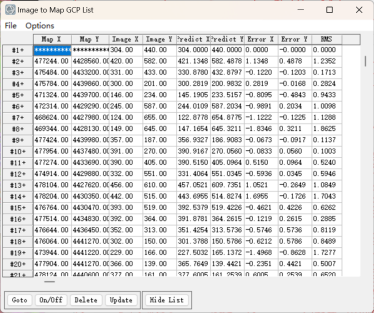
图24 管理控制地面控制点的列表
2.4 多项式和最近邻法配准
1)【Ground Control Points Selection】→ 【Options】→【Warp File】,弹出【Input Warp Image】对话框,选择文件“bldr_tm.img”,单击【OK】,默认所有波段进行配准;
2)【Method】选项默认【Polynomial】,【Resampling】选项默认【Nearest Neighbor】,【Background】默认背景值设置为“0”。在【Enter Output Filename】设置文件名“bldr_tm_m”,配准影像自动加载到视窗中;
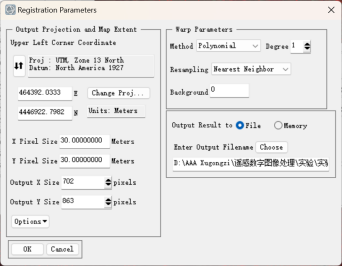
图25 配准参数对话框
3)注意Landsat TM轨道方向造成的图像倾斜,这个影像带有地理参考,但是分辨率为“30”米。
图26 加载配准影像结果
2.5 显示并评估结果
1)【File】→【Open】→【Data Manager】,选择校正结果的任意三个波段(此处我选择建议4,3,2组合)与矢量文件,将文件加载在显示窗口中。因为具有相同的地理参考,矢量文件和校正的影像结果会自动叠加,检查两者是否准确配准;
图27 矢量文件和校正的影像结果叠加
2)现代传感器获取影像数据时收集星历数据,允许精确定位到地图坐标。ENVI提供了一种存储传感器几何信息和自动将影像数据校正到指定地图投影\坐标的范例。IGM文件包含未校正输入影像中的每个像素的指定地图投影的x和y地图坐标;GLT文件包含从输入影像到输出影像的每个像元的行和列对应的信息。如果GLT数据中该值是正的,则说明是精确的像素匹配;如果该值为负,则没有精确匹配,匹配时是利用相邻像素。可以通过ENVI工具栏中提供的三种方法赋予图像地理参考信息:
①【Geometric Correction】→【Build GLT】(几何校正→建立GLT)从输入几何信息中建立GLT文件;
②【Geometric Correction】→【Georeference from GLT】(几何校正→ 来自GLT的地理参考)利用几何查找影像进行几何校正;
③【Geometric Correction】→【Georeference from IGM】(几何校正→来自 IGM的地理参考)根据输入影像进行几何校正,并生成GLT文件。
3.已知几何信息的几何校正
3.1打开并浏览数据
1)【File 】→【Open】,选择“cup99hy_true.img”文件,影像将显示在视窗中,单击【Display】→【Cursor Value】,对未校正的高光谱数据特征进行检查,并单击工具栏中的十字光标,显示十字光标值和像素数据的实际值;
2)在整个影像中移动光标,检查像素位置和数据值,以及像素间的几何关系(旋转、道路曲率等),关闭【Cursor Value】。
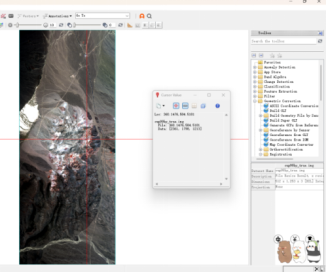
图28 光标值对话框及十字光标
3.2打开并浏览IGM文件
1)【File 】→【Open】,选择“cup99hy_geo_igm”文件,数据将加载到【Data Manager】,其中的IGM Input X Map数据将会自动加载到视窗中;
2)使用【Cursor Value】检查未校正的HyMap数据特征。在整个影像中移动光标,并检查像素位置和数据值;
3)【Data Manager】选中IGM Input Y Map波段,点击【Load Data】,图像将会显示在视窗中,使用【Cursor Value】浏览影像;
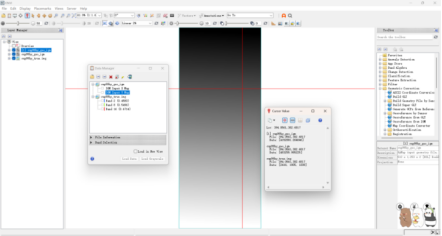
图29 IGM影像浏览
3.3利用IGM文件进行地理校正
1)【Geometric Correction】→【Georeference from IGM】,弹出【Input Data File】对话框,选择“cup99hy_true.img”文件,弹出【Input X Geometry Band】对话框,选择【IGM Input X Map】,弹出【Input Y Geometry Band】;
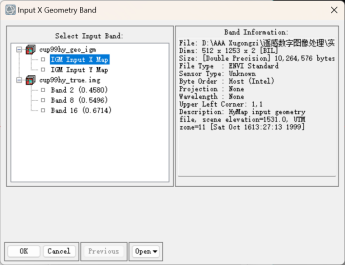
图30 【IGM Input X Map】
2)选择“cup99hy_geo_igm”文件的【IGM Input Y Map】,弹出【Geometry Projection Information】对话框;
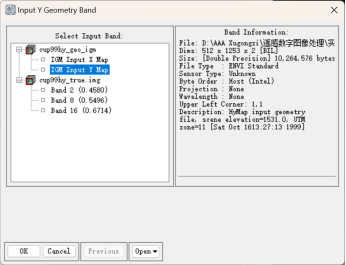
图31 选择【IGM Input Y Map】
3)分别在【Input Projection of Geometry Bands】及【Output Projection for Georeferencing】列表框选择输入和输出投影的类型,投影方式选择UTM,基准【Datum】设置为North America 1927,【Zone】设置为13,单击OK,生成一个与输入几何相同的地图投影的影像;

图32 编辑投影几何信息
4)在弹出的对话框中的【Enter Output GLT Filename】字段处,点击【Choose】,选择路径并输入输出文件名将结果存放到指定目录;
5)在【Georeference Background Value】字段中,键入背景值新值“- 9999”,在【Output Georef Filename】字段处,点击【Choose】,选择路径并输入输出文件名将结果存放到指定目录,点击【OK】;

图33 构建集合查找文件
6)使用【Cursor Value】观察数据的特性。在整个影像中移动光标并检查影像的几何形状、像素位置、地图坐标和数据值。
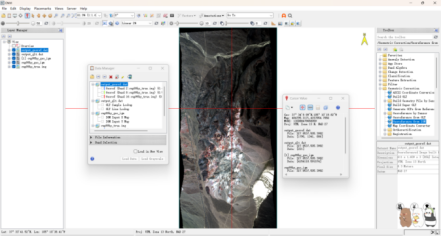
图34 使用【Cursor Value】观察数据特性
3.4打开并浏览GLT文件
1)【File】→【Open】,选择“cup99hy_geo_glt”文件,数据将自动加载到视窗中;
2)使用【Cursor Value】特征观察数据的特性。在整个影像中移动光标,并检查像素位置和数据值。特别注意的是,负值表明使用了最近邻像素;
3)在【Data Manager】中选择“cup99hy_geo_glt”文件的【GLT Line Look-up】,然后使用【Cursor Value】功能浏览影像;
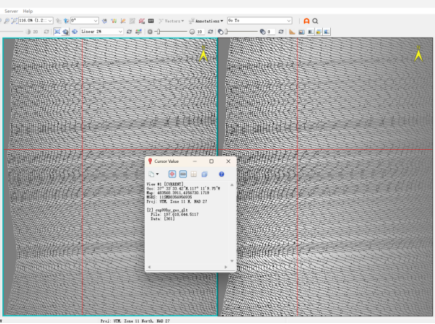
图35 GLT影像浏览
3.5利用GLT文件进行几何校正
1)【Geometric Correction】→【Georeference from GLT】,弹出【Input Geometry Lookup File】对话框,选择“cup99hy_geo_glt”文件;
2)【Input Data File】对话框中选择“cup99hy_true.img”文件,弹出【Georeference from GLT Parameters】对话框,【Subset to Output Image Boundary】后默认Yes,表示校正时是使用原始数据的一个子集作为输入文件,只输出校正的子集区域。
3)在【Background Value】字段中,键入【-9999】,键入或选择地理参考影像的输出文件名,结果自动加载到视窗中;
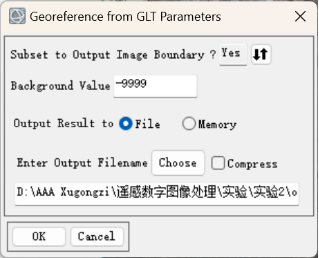
图36 设置背景值
4)使用【Cursor Value】观察数据的特性。在整个影像内移动光标,并检查影像的几何形状、像素位置、地图坐标和数据值。
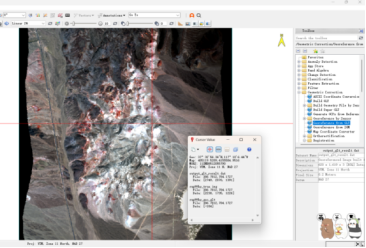
图37 校正结果
3.6利用地图投影建立GLT
1)【Geometric Correction】→【Build GLT】,弹出【Input X Geometry Band对话框】,【Open】→【New File】,选择“cup99hy_geo_igm”文件;
2)弹出【Input X Geometry Band】对话框,选择【IGM Input X Map】,弹出【Input Y Geometry Band】对话框;
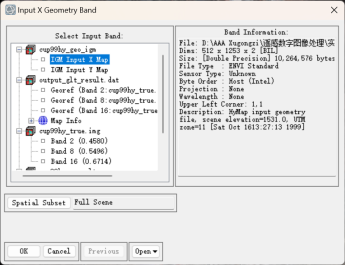
图38 选择【IGM Input X Map】
3)选择【IGM Input Y Map】并单击【确定】,弹出【Geometry Projection Information】对话框;
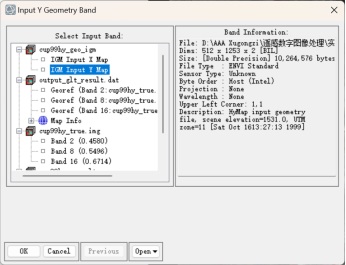
图39 选择【IGM Input Y Map】
4)下拉【Output Projection from Georeferencing】对话框,选择【State Plane NAD 27】作为输出投影的基准面,单击【Set Zone】按钮,选择【(2703,4651)Nevada West】作为输出区,在【Geometry Projection Information】对话框中单击【OK】;
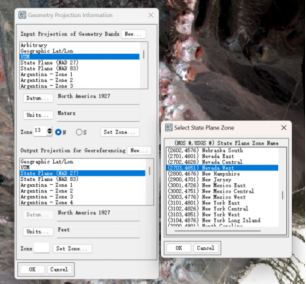
图40 编辑投影几何信息
5)【Build Geometry Lookup File Parameters】对话框中,键入或选择GLT的输出文件名,创建GLT文件;
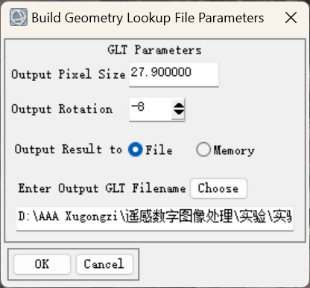
图41 建立投影几何信息
6)使用前面介绍的“使用GLT文件对影像进行地理校正”中列出的步骤,对“cup99hy.eff”数据进行几何校正并且比较结果UTM的校正影像。比较完后关闭所有的显示窗口。
五、实验数据处理或分析结果
(1)图像到图像的几何校正;
①编辑后图像控制点的截图
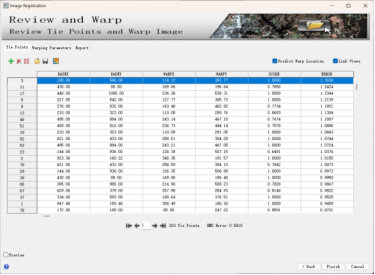
图42 编辑后的控制点列表
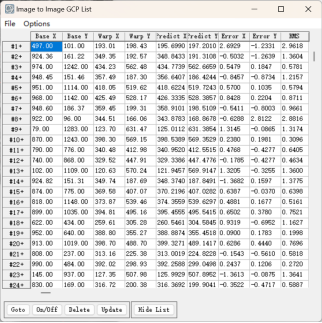
图43 图像至图像GCP列表
②编辑后控制点的总精度
编辑后的控制点列表中,BASEX表示基准图像上连接点的X像素坐标列数;BASEY表示基准图像上连接点的Y像素坐标行数;WARPX表示待校正图像上连接点的X像素坐标列数;WARPY表示待校正图像上连接点的Y像素坐标行数;SCORE表示连接点匹配的得分,反映了匹配的准确性。得分越高,匹配越准确;ERROR表示连接点的误差值,反映了基准图像和待校正图像上对应点之间的偏差。误差值越小,配准精度越高。从表中可得:控制点的均方根误差RMS为0.5810。
③图像至图像的几何校正结果
图44 基于仿射变换模型的最邻近法校正结果
图45 基于仿射变换模型的双线性插值法校正结果
图46 基于仿射变换模型的三次卷积法校正结果
图47 基于多项式模型的三级卷积法校正结果
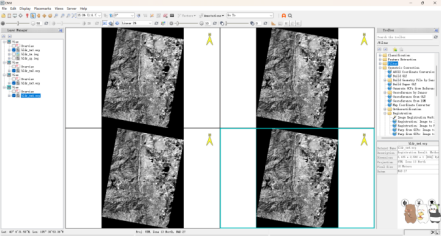
图48 比较三种不同重采样方法得到的影像
(2)图像至地图的几何校正;
①编辑后图像控制点的截图
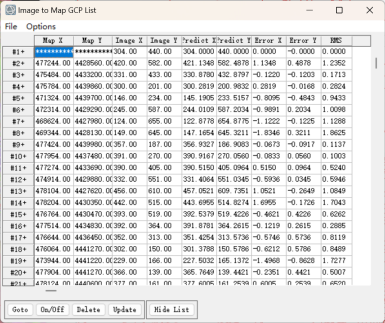
图49 图像至地图GCP列表
②编辑后控制点的总精度
编辑后的控制点列表中,包括基准地图坐标、实际跟预测图像坐标及相应RMS误差。
③图像至地图的几何校正结果
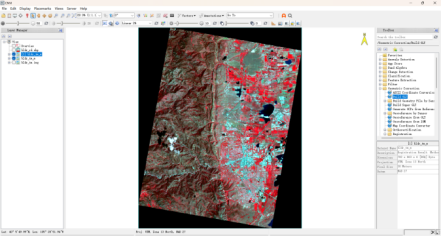
图50 图像至地图的几何校正结果影像
(3)已知几何信息的几何校正结果。
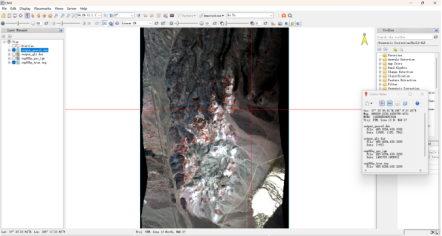
图51 利用IGM文件进行地理校正结果
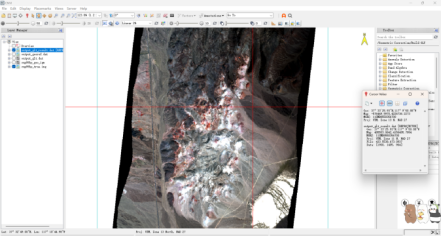
图52 利用GLT文件进行几何校正结果
六、思考与总结
(1)思考
①图像至图像几何校正的挑战与策略
图像至图像的几何校正涉及到将一幅图像与另一幅参考图像对齐,这要求我们考虑如何选择合适的地面控制点(GCPs)以最小化校正误差,以及如何评估校正后图像的精度。探讨不同几何校正算法(如仿射变换、多项式变换)的适用性和局限性,以及它们在不同场景下的表现;
②提高已知几何信息的几何校正的效率与准确性
利用传感器的内部和外部定向参数来提高校正的效率与准确性。在传感器模型不完美或轨道数据有误差的情况下,可以通过迭代最近点法来优化校正过程;
③几何校正中的误差来源与控制
几何校正过程中可能存在多种误差来源,包括传感器误差、大气折射、地形起伏等。考虑如何识别和量化这些误差来源对校正结果的影响,通过算法优化来控制和减少这些误差;
④几何校正后的数据分析与应用
几何校正后的图像可以直接用于地物分类、变化检测、环境监测等应用。如果要进行更复杂的空间分析,可以将校正后的遥感数据与其他类型的地理空间数据(如高程数据、土地利用数据)结合,以满足特定应用的需求。
(2)总结
图像至图像的几何校正主要是通过对比不同时间或不同传感器获取的图像,利用地面控制点(GCPs)进行配准,以确保图像之间的几何一致性。通过这种校正,可以消除由于传感器位置、姿态变化或地形起伏等因素造成的几何畸变,从而提高图像的可比性和分析的准确性。
图像至地图的几何校正将遥感图像与已有的地图数据进行配准,通过使用地面控制点和地图坐标系统,将遥感图像准确地定位到地理坐标系中。这一过程对于后续的空间分析和地理信息系统(GIS)应用至关重要,因为它确保了遥感数据与其他地理数据的兼容性。
已知几何信息的几何校正利用传感器的姿态信息、轨道数据等已知几何信息来进行校正。这种方法通常依赖于精确的传感器模型和地理信息,能够在一定程度上减少对地面控制点的依赖,提高校正的效率和准确性。
通过以上几个步骤,几何校正为遥感图像的后续分析奠定了基础,不仅提高了图像的空间精度,还为后续的定量分析、变化检测和地物分类提供了可靠的数据支持。准确的几何校正能够有效地消除图像中的几何误差,使得遥感数据在实际应用中更加有效和可靠。

















 144
144

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









