






基于转子磁链定向的异步电动机矢量控制系统
MATLAB/SIMULINK仿真模型(2018b)及说明报告,仿真结果良好。
报告第一部分讨论异步电动机的理论基础和数学模型,第二部分介绍矢量控制的具体原理,第三部分对调速系统中所用到的脉宽调制技术CFPWM、SVPWM进行了介绍,第四部分介绍了MATLAB仿真模型的搭建过程,第五部分对仿真结果进行了展示及讨论。
ID:6950684082015068
漫天飞雪
标题:基于转子磁链定向的异步电动机矢量控制系统的MATLAB SIMULINK仿真模型及结果分析
摘要:本文基于转子磁链定向的异步电动机矢量控制系统,采用MATLAB SIMULINK仿真模型进行了研究和分析。首先,介绍了异步电动机的理论基础和数学模型。其次,详细阐述了矢量控制的具体原理。然后,对调速系统中常用的脉宽调制技术CFPWM和SVPWM进行了介绍。接下来,描述了MATLAB仿真模型的搭建过程。最后,展示和讨论了仿真结果。
关键词:异步电动机,矢量控制,脉宽调制,SIMULINK仿真
-
引言
异步电动机广泛应用于各个领域的电力驱动系统中,具有结构简单、可靠性高和成本低等优点。为了提高异步电动机的控制精度和动态性能,矢量控制技术应运而生。本文旨在通过MATLAB SIMULINK仿真模型研究基于转子磁链定向的异步电动机矢量控制系统。 -
异步电动机的理论基础和数学模型
2.1 异步电动机的原理
异步电动机是通过感应转子中的电动势来实现运转的。其转子由绕组和铁芯构成,当定子中的三相交流电流流过时,会在转子中产生旋转磁场。由于转子绕组中的电流是感应的,所以称之为异步电动机。
2.2 异步电动机数学模型
异步电动机的数学模型是描述其动态特性的重要工具。常用的数学模型包括电动势方程、转子转矩方程和电机方程。通过这些方程,可以推导出异步电动机的状态方程和传递函数。
-
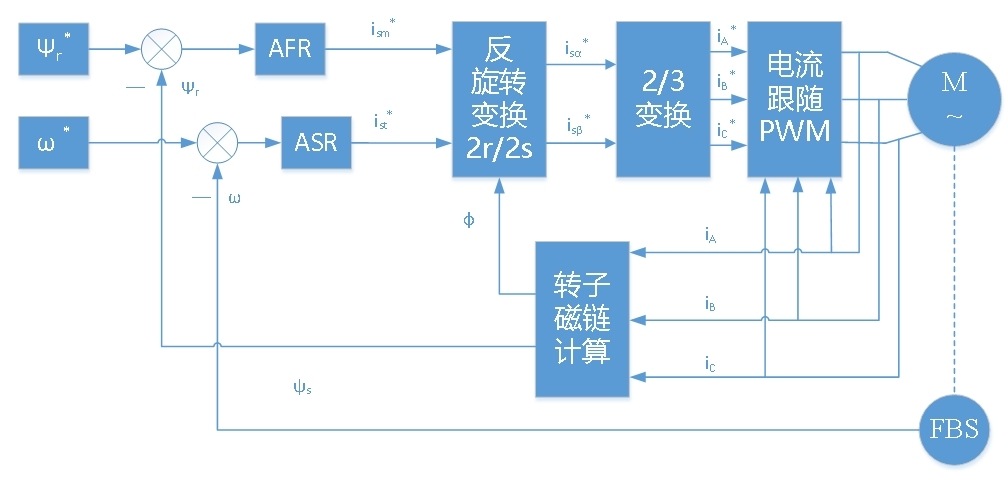
矢量控制的具体原理
矢量控制是一种基于转子磁链定向的控制方法,通过改变电机的磁链方向和大小,实现对电机转速和转矩的精确控制。矢量控制可分为直接矢量控制和间接矢量控制两种方法。本文主要以间接矢量控制为例,详细介绍其原理和实现过程。 -
脉宽调制技术的介绍
脉宽调制技术是调速系统中常用的控制策略之一,用于生成控制信号来调节电机的输出。常见的脉宽调制技术有CFPWM和SVPWM。CFPWM是基于定频率的脉宽调制技术,适用于低功率应用;SVPWM是基于空间矢量的脉宽调制技术,适用于高功率应用。本文分别介绍了它们的原理和特点。 -
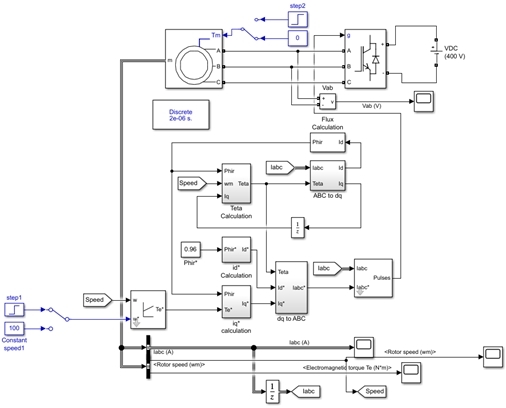
MATLAB仿真模型的搭建过程
为了验证基于转子磁链定向的异步电动机矢量控制系统的性能,本文使用MATLAB SIMULINK进行了仿真模型的搭建。首先,搭建了异步电动机的电路模型和电机模型。然后,设置并优化了控制策略和参数。最后,通过仿真运行模型,观察系统的动态响应和稳态性能。 -
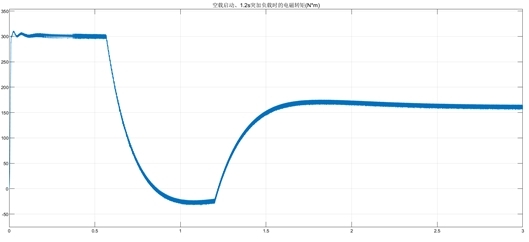
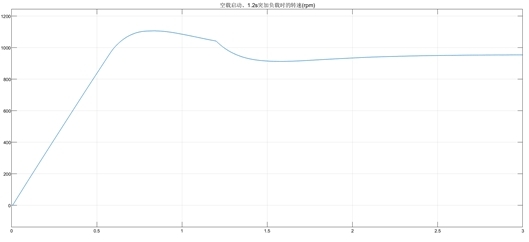
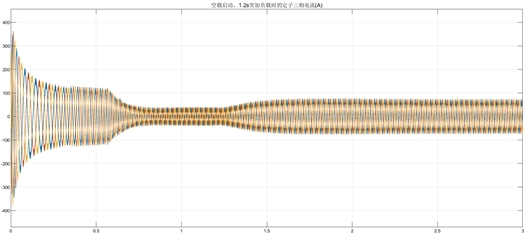
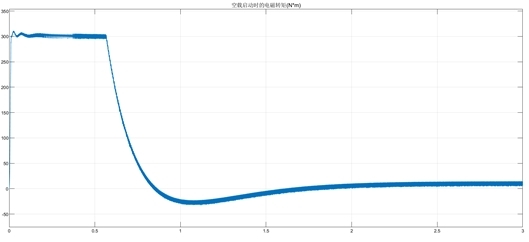
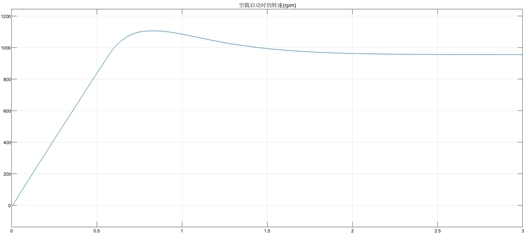
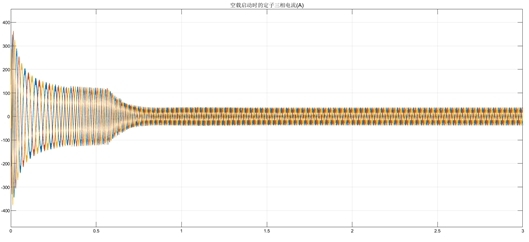
仿真结果的展示与讨论
本文通过仿真模型得到了异步电动机矢量控制系统的仿真结果。分析了系统的转速响应、转矩响应和电流波形。通过对仿真结果的展示与讨论,得出了对系统性能的评价和改进方向。 -
结论
本文基于转子磁链定向的异步电动机矢量控制系统进行了MATLAB SIMULINK仿真模型的研究和分析。通过介绍异步电动机的理论基础和数学模型,详细阐述了矢量控制的具体原理,介绍了常用的脉宽调制技术CFPWM和SVPWM。然后,描述了仿真模型的搭建过程,并展示和讨论了仿真结果。仿真结果表明,基于转子磁链定向的异步电动机矢量控制系统在控制精度和动态性能方面具有良好的表现。
参考文献:
[1] 王志强, 赵明东. 异步电动机及其控制[M]. 清华大学出版社, 2010.
[2] 李建军, 杨光. SIMULINK在电力电子技术仿真中的应用[C]. 电力自动化设备与系统应用国际会议, 2019.
【相关代码 程序地址】: http://nodep.cn/684082015068.html















 844
844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









