







BDD100K-YOLO 智能交通目标检测系统
项目概述
本项目是基于YOLOv8模型和BDD100K数据集开发的交通场景目标检测系统,能够对道路环境中的各类物体进行精准识别与分类。作为计算机视觉在智能交通领域的重要应用,该系统可为自动驾驶、交通监控等场景提供关键技术支撑。
核心功能模块

1. 模型训练模块 (YOLO.ipynb)
- 实现YOLOv8模型的全流程训练
- 支持多GPU分布式训练加速
- 集成学习率自动调整策略
- 包含数据增强管道配置
2. 环境清理模块 (reset.ipynb)
- 自动化清理训练生成的临时文件
- 特别设计用于删除"runs"训练记录文件夹
- 支持训练前的环境初始化
3. 图像检测模块 (controller.ipynb)
- 提供用户友好的检测接口
- 支持单张图片/视频流输入
- 可视化检测结果输出
- 可扩展的检测结果后处理

技术实现细节
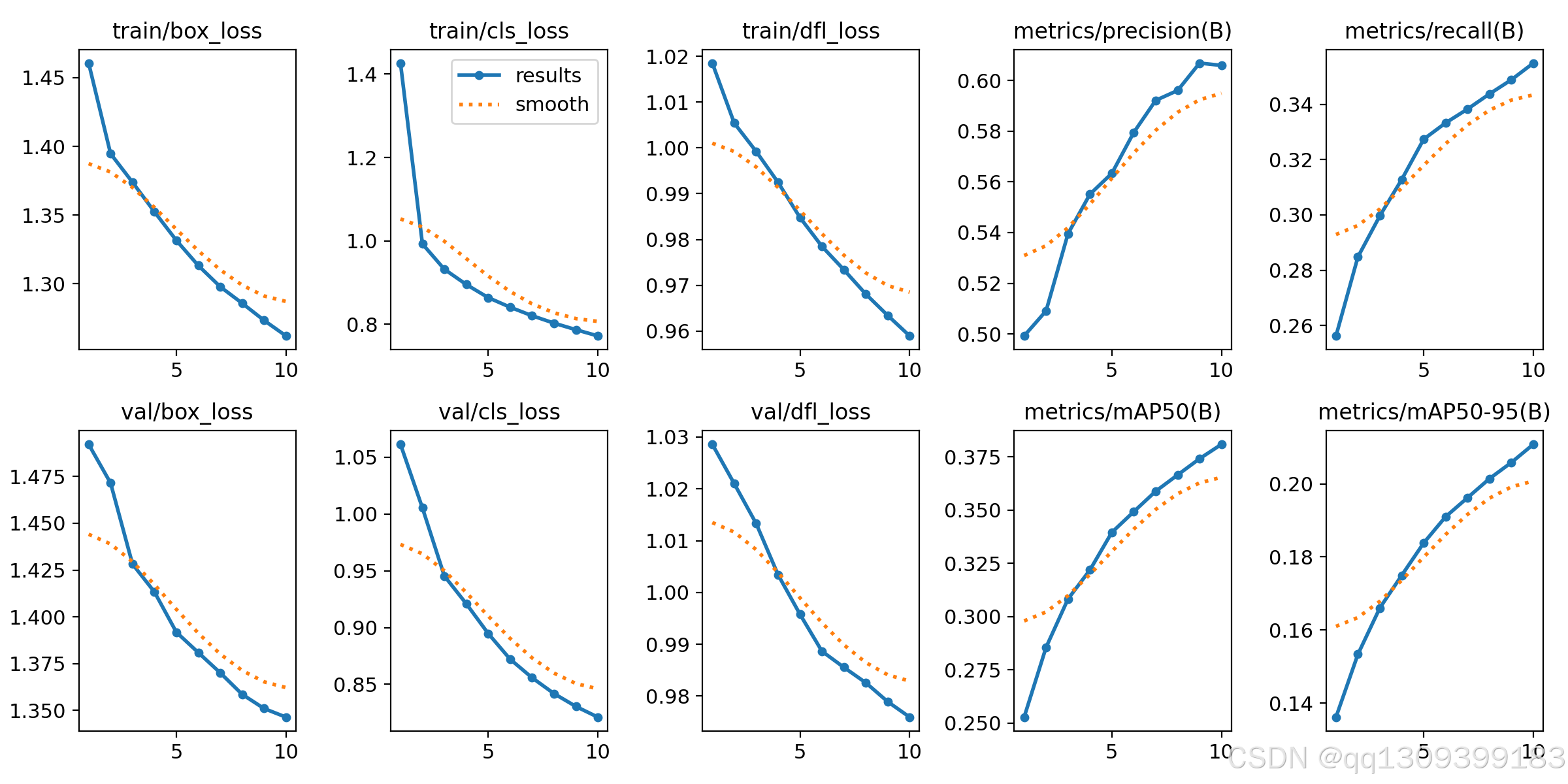
训练配置
- 训练轮次:基础训练10轮次(验证50轮次无过拟合)
- 数据集:BDD100K大型交通数据集
- 硬件要求:建议配备NVIDIA GPU加速
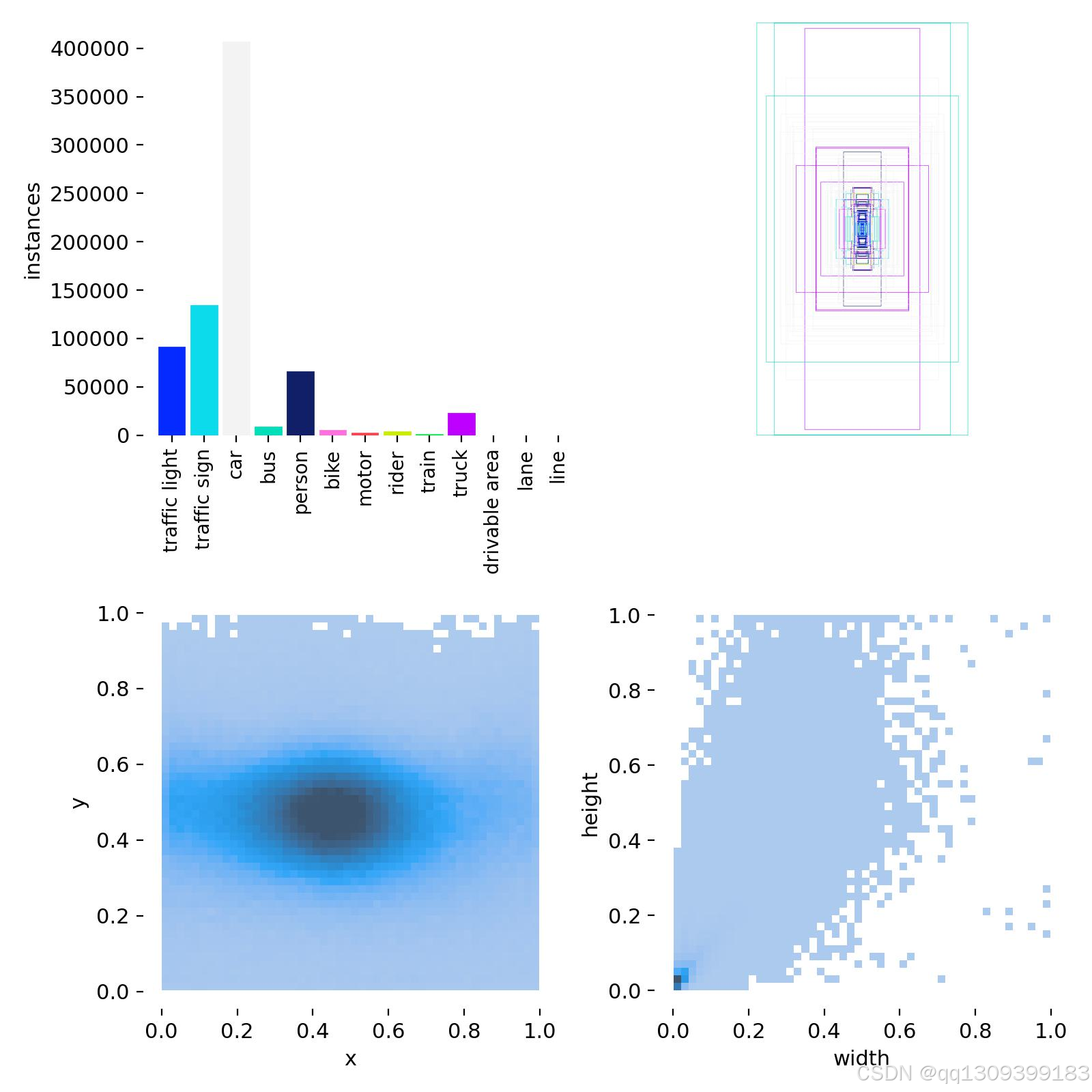
数据类别及详细
nc: 13
names: [
"traffic light",
"traffic sign",
"car",
"bus",
"person",
"bike",
"motor",
"rider",
"train",
"truck",
"drivable area",
"lane",
"line"
]
数据集说明
BDD100K数据集包含:
- 10万张标注图像
- 覆盖多种天气条件
- 包含昼夜不同时段
- 100+类交通相关物体
使用指南
环境准备
- 安装依赖库:
pip install ultralytics torchvision opencv-python
### 快速开始
1. 配置检测参数:
```python
# 在controller.ipynb中修改
image_path = "your_image.jpg" # 替换为本地路径
model_path = "bdd100k_yolov8.pt"
- 执行检测:
!python detect.py --weights {model_path} --source {image_path}
注意事项
- 路径配置:务必修改文件中的本地路径指向
- 硬件适配:根据GPU显存调整batch size
- 扩展训练:建议在10轮次基础上继续微调
- 问题反馈:遇到技术问题请联系项目维护者
性能优化建议
- 使用混合精度训练加速
- 尝试不同的数据增强组合
- 调整anchor boxes尺寸
- 实施知识蒸馏压缩模型
应用场景
- 自动驾驶环境感知
- 交通流量统计分析
- 道路异常事件检测
- 智能交通管理系统
后续开发计划
- 增加ONNX/TensorRT导出支持
- 开发实时视频流处理接口
- 集成更多交通专用检测类别
- 优化模型在边缘设备的部署


















 869
869

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









