







大学生方程式赛车视觉感知模块专用锥桶检测模型
文章目录
项目概述

本代码库包含一个专为高速环境下检测大学生方程式赛车锥桶而定制训练的目标检测模型。该模型基于YOLOv11s架构训练,并附带了完整的性能分析和训练可视化报告。
目录结构
- 项目概览
- 数据集说明
- 训练过程
- 验证结果
- 性能指标
- 实际效果
项目概览
本代码库展示了一个定制目标检测模型的完整训练与评估流程,主要亮点包括:
- 使用框架:YOLOv11s轻量级架构
- 数据集来源:RoboFlow公开数据集
- 性能指标:包含精确率(precision)、召回率(recall)和F1分数的深度分析
- 可视化报告:训练/验证批次样本、混淆矩阵和指标曲线图
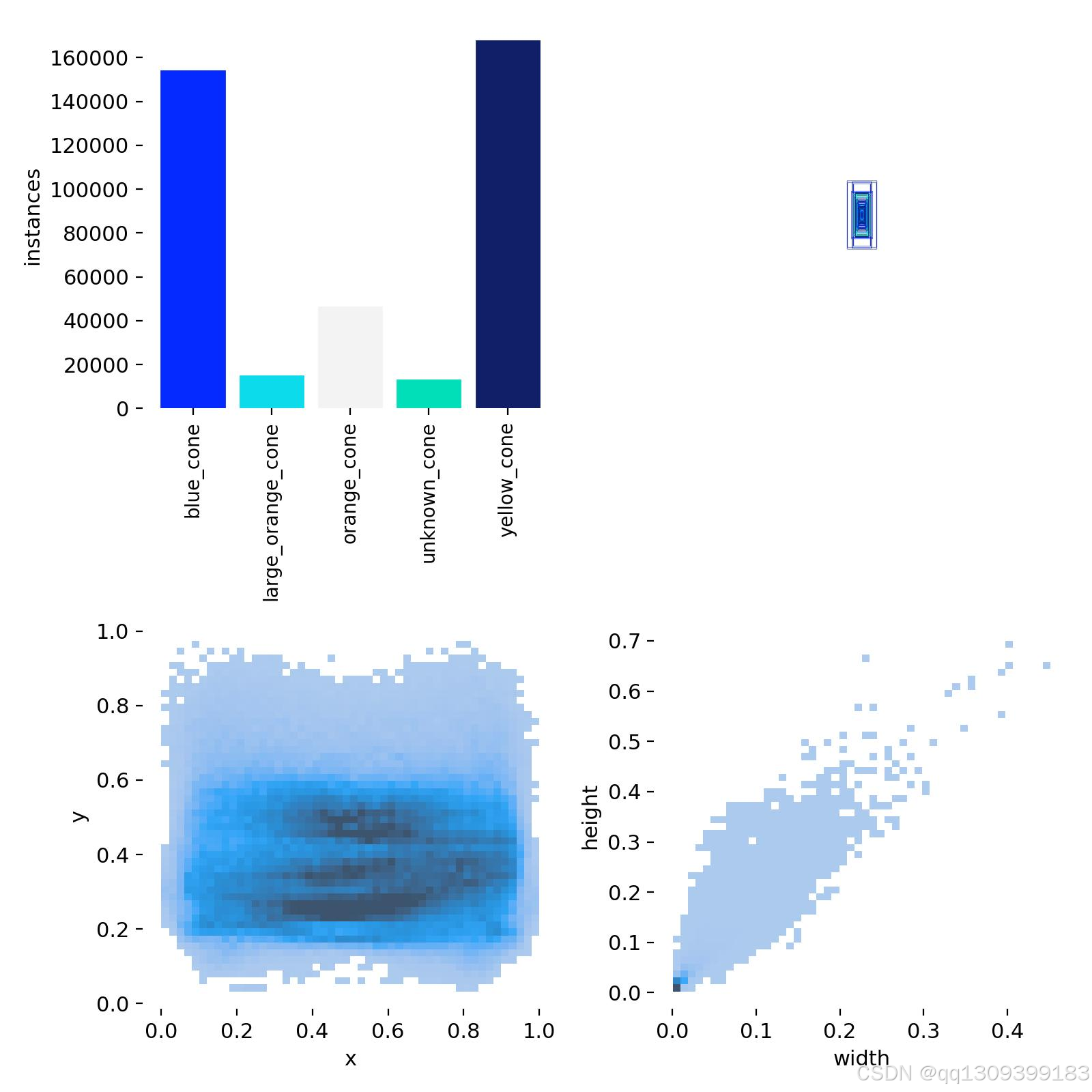
数据集说明
类别分布
下图展示了数据集中各类标签的分布情况:
![标签分布图]
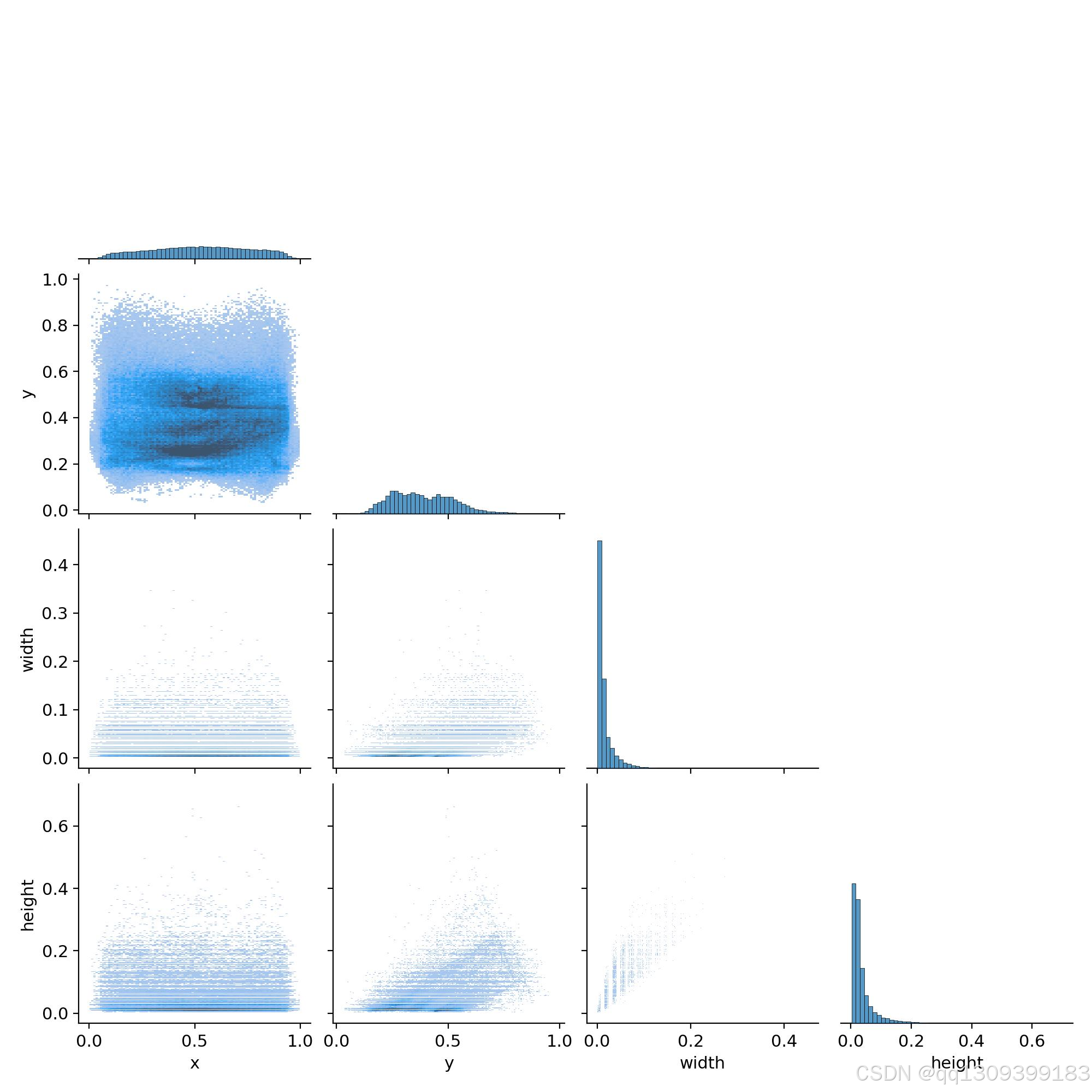
相关性分析
通过相关图呈现数据集中各类别间的相互关系:
![标签相关性图]
训练过程
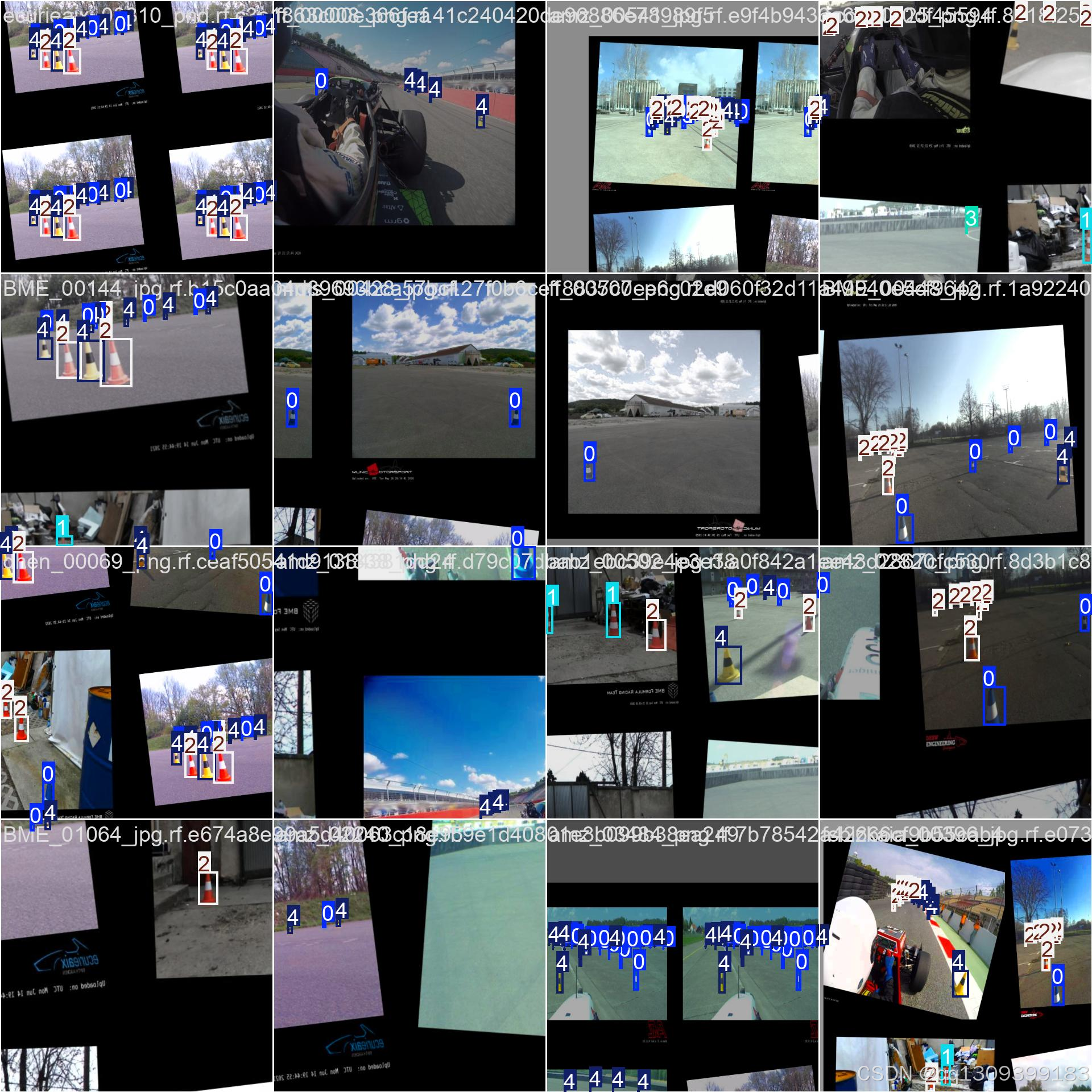
训练样本展示
来自训练数据的代表性样本图像:
![训练批次0] ![训练批次1]
训练结果
训练过程中损失函数的变化趋势:
![训练验证损失曲线]
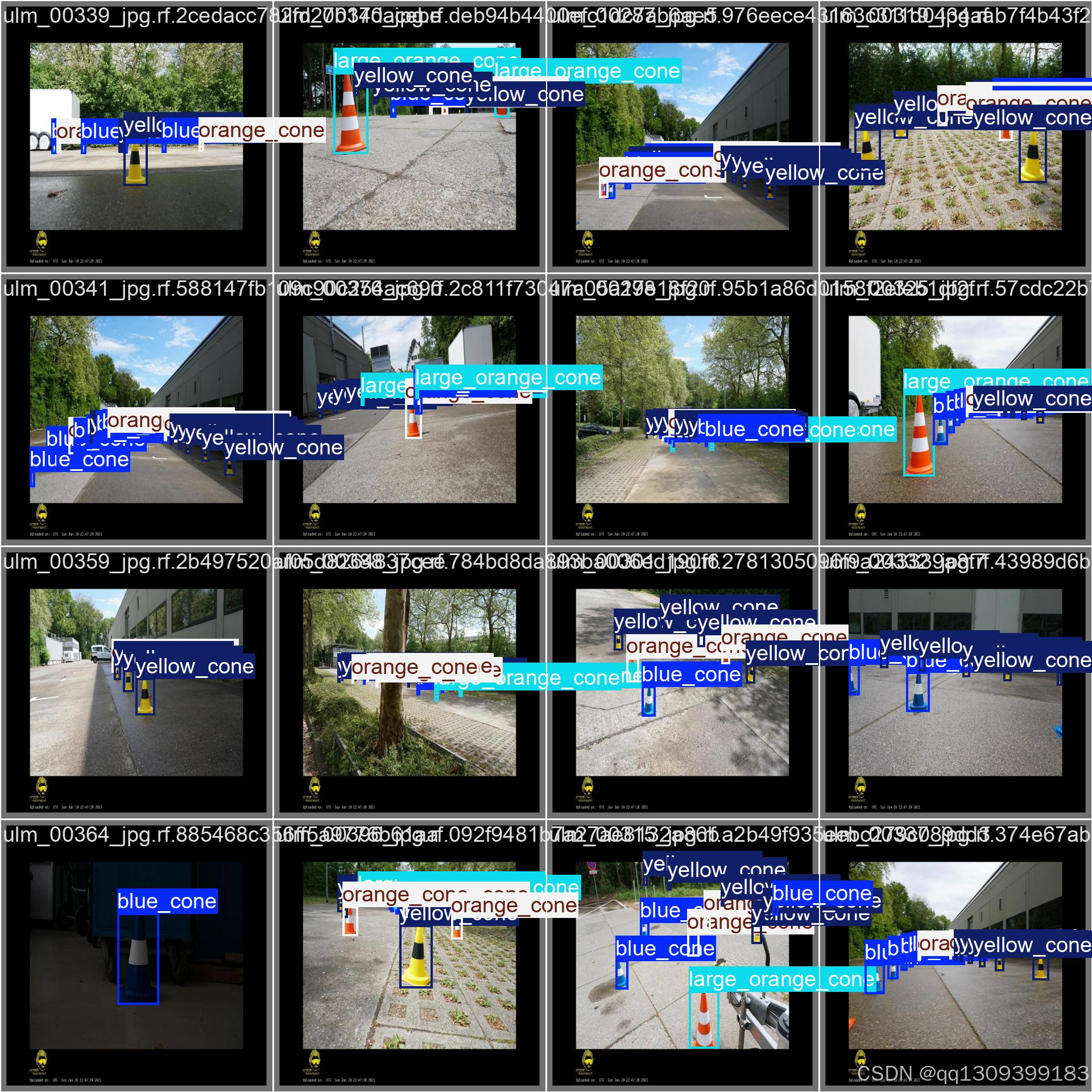
验证结果
验证样本分析
验证集样本的真实标签与预测结果对比:
真实标签:
![验证批次0-标签]
模型预测:
![验证批次0-预测]
性能指标
混淆矩阵
展示模型区分不同类别的能力:
![混淆矩阵]
归一化混淆矩阵
按类别细化的准确率分析:
![归一化混淆矩阵]
性能曲线
- 精确率-召回率(PR)曲线:![PR曲线]
- 精确率§曲线:![P曲线]
- 召回率®曲线:![R曲线]
- F1分数曲线:![F1曲线]
实际效果
该模型在验证集上取得了0.92的F1分数。目前已完成部署测试,测试视频源自查尔默斯大学生方程式赛车队的YouTube实况录像。
效果演示视频:[MP4格式结果视频]
注:所有方括号内的图片/视频链接需替换为实际项目中的可视化文件路径。本模型特别优化了对高速移动场景下彩色锥桶的检测能力,适用于大学生方程式自动驾驶组别的赛道边界识别任务。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









