







收藏和点赞,您的关注是我创作的动力
概要
智能小车是轮式移动机器人的一种表现形式。本文研究的智能小车主要用传感器来实时检测输入信号,通过信号循迹避障和声音控制。循迹功能主要通过红外对管对黑线的检测,避障功能通过光电传感器实现,声控功能通过使用声音传感器实现,主要控制芯片使用AT89C51,因为该芯片的内存比较大,智能小车电机驱动器芯片使用L298N。结合芯片程序使小车两边设计的直流电机拖动小车运行,使小车可以自动识别路线,并可以有效地控制遇到障碍物时的转弯角度和跟踪行驶。并增加了语音控制模块,实现了汽车的语音控制。本文设计的智能小车结构单一、实施性强、另外可以体现出智能技术。红外对管的作用是用来检测黑线和障碍物。小车的速度和转向用微型芯片控制使用STC89C52,其功能为一方面可以有效的避开障碍物,另一方面可以实现自动跟踪。小车的驱动电路用L298N。通过设计单片机输出的波形。PWM波控制速度的快慢。
关键词:智能小车 AT89C51 避障机器人 L298N 传感器
一、系统设计总体思路
智能汽车与机器人的基本结构相似,主要有三部分构成即中央处理部分、检测部分和执行器部分。智能小车主要作用一是检测障碍物并在可控的范围内躲避障碍物,二是通过导线的感应来实现自动跟踪的功能。本文设计一套控制系统来优化小车的运行情况,确保小车在运行过程中处在稳定安全的状态[5]。
检测部分选用的硬件设备为照相机和红外传感器。用照相机来感知清晰的图像,用红外传感器一般检测道路的实际情况。机械执行部位选择具有换向功能的四轮小车或前轮为万向的三轮车,其中动机元件为直流电动机。中央处理部分即CPU选择51单片机或者AMR芯片。通过编程软件将控制部分、执行部分和动力部分有机的结合起来,实现智能小车的自动跟踪和避障功能[6]。化代码或者变更硬件来解决。在反复的测试中查找问题,优化代码,使整个项目功能达到满意。
二、确定方案和元件选择
2.1 系统方案确定
本文设计小车的主要功能为:
(1)根据实时检测的路径行驶;
(2)通过实时检测障碍物来进行避障;
(3)用声音传感器实现声控;
单片机使用的主芯片为AT89C51。该芯片主要有避障模块。语音控制模块。电源模块和驱动模块组成。系统框图如图2.1所示。避障模块主要通过传感器检测并收集周围的信息尽分析后传输给主芯片。通过主控制的处理,控制电动机的运行,实现循迹和避障,实现智能驾驶。语音控制模块主要是通过检测声音信息并反馈给CPU来控制小车停止和行驶。
本课题所选用的车形为三轮车,驱动方式为后轮驱动。后轮的左侧和右侧由电动机驱动。主要控制和调节后轮来控制整个车体的启动和停止。前轮选择万向轮一方面其支撑作用,另一方面其转向的作用。用软硬件结合的方式来控制小车。
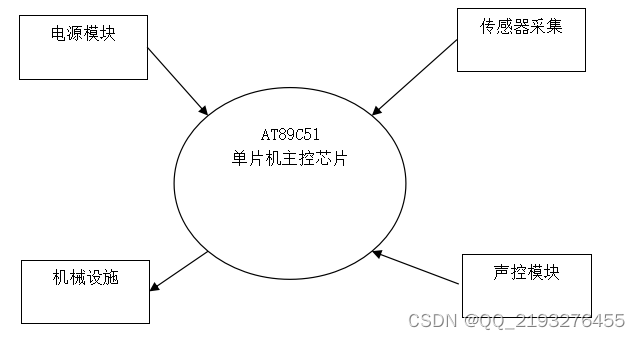
图2.1 系统总体框
三、系统硬件部分设计
通过各个单元模块设计电路。综合得整体电路图。如下图所示
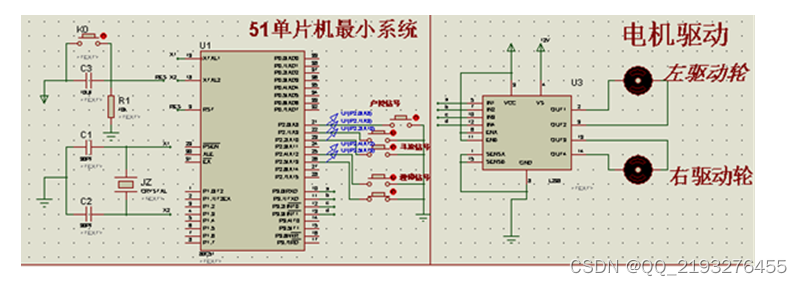
图3.14 整体电路图
四、实现
系统程序流程设计
智能车检测每个模块传感器的输入信号。用红外对管检测黑线来实现跟踪。通过光电传感器实现避障。并将收集到的所有信息发送给主处理器。从而小车可以正确行驶。小车的启动和停止均采用语音控制模块来实现小车的语音控制。其程序流程图如图5.3所示。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 179
179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









