






惯导里程计GPS组合导航算法,matlab代码卡尔曼滤波
ID:1380696735385704
战神新添

惯导里程计GPS组合导航算法在现代导航系统中具有重要的应用价值。本文将围绕该算法展开分析,并使用Matlab语言实现卡尔曼滤波模块。
-
引言
导航系统是现代社会中不可或缺的一部分,而在导航系统中,惯导里程计GPS组合导航算法被广泛应用。该算法通过结合惯导和GPS两种传感器的测量数据,实现高精度、高稳定性的导航定位。本文将对该算法的原理进行详细解读,并使用Matlab语言编写卡尔曼滤波模块,以实现精确的导航定位。 -
惯导里程计GPS组合导航算法原理
2.1 惯导原理
惯导系统采用加速度计和陀螺仪等传感器来测量导航平台的加速度和角速度,通过积分得到导航平台的速度和位置信息。惯导系统具有高精度、高更新频率的优点,但随着时间的推移,导航误差会逐渐累积。
2.2 GPS原理
GPS系统通过接收卫星发射的信号,测量接收机与多颗卫星之间的距离,进而确定接收机的位置。GPS具有较高的精度和全球覆盖的特点,但在某些环境下,如高楼谷物和室内,GPS信号可能会受到干扰而导致测量误差。
2.3 组合导航原理
惯导和GPS的测量数据经过组合导航算法的处理,可以充分发挥两者的优点,提高导航定位的准确性和稳定性。组合导航算法通常使用卡尔曼滤波进行数据融合和误差补偿。
-
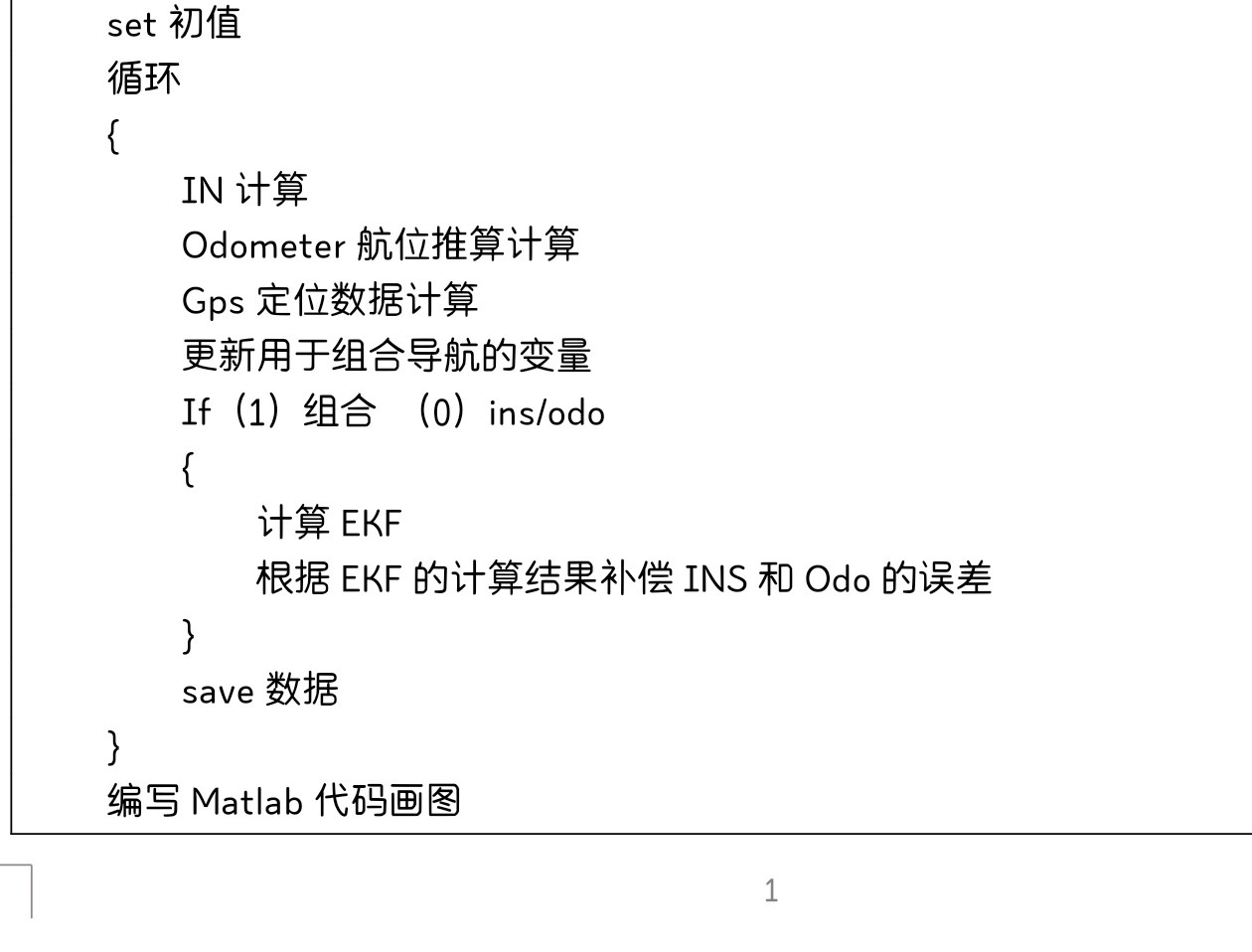
组合导航算法实现
为了实现惯导里程计GPS组合导航算法,我们使用Matlab语言编写卡尔曼滤波模块。卡尔曼滤波是一种递归滤波算法,能够根据系统的状态方程和测量方程来估计系统的状态和误差协方差。在卡尔曼滤波的过程中,惯导和GPS的测量数据被融合,并通过估计系统的状态和误差协方差来滤除误差,从而得到精确的导航定位结果。 -
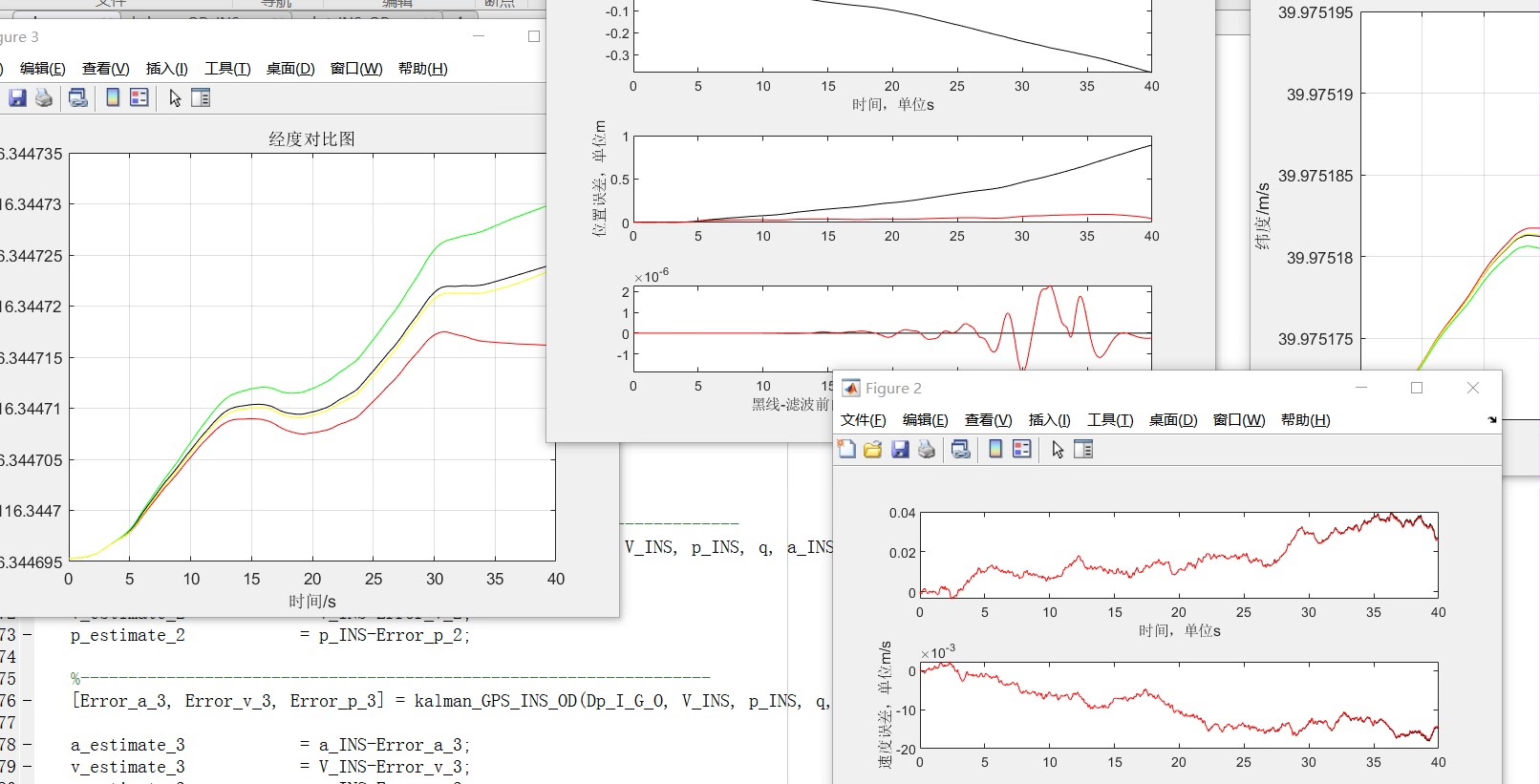
结论
惯导里程计GPS组合导航算法是一种在导航系统中广泛应用的技术,通过结合惯导和GPS两种传感器的测量数据,可以实现高精度、高稳定性的导航定位。本文以Matlab代码的形式实现了卡尔曼滤波模块,并通过对惯导和GPS数据的融合,得到精确的导航定位结果。该算法在实际导航应用中具有重要的价值和意义。
通过以上分析,我们对惯导里程计GPS组合导航算法有了更深入的理解。该算法的实现需要综合考虑各个传感器的特点和误差,以及合适的滤波算法,从而提高导航系统的精度和可靠性。希望本文的分析对读者有所启发,并为研究和应用惯导里程计GPS组合导航算法提供参考。
以上相关代码,程序地址:http://wekup.cn/696735385704.html















 7452
7452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









