







 本文探讨了GPS和惯性传感器在无人驾驶定位中的应用。GPS虽然精准但更新频率低,而惯性传感器更新频率高但误差会累积。通过卡尔曼滤波器融合两种传感器数据,可以实现更实时且精准的定位。此外,无人驾驶还会结合其他定位方法以提高可靠性。
本文探讨了GPS和惯性传感器在无人驾驶定位中的应用。GPS虽然精准但更新频率低,而惯性传感器更新频率高但误差会累积。通过卡尔曼滤波器融合两种传感器数据,可以实现更实时且精准的定位。此外,无人驾驶还会结合其他定位方法以提高可靠性。
作者:刘少山,张哲
本文为《程序员》原创文章,未经允许不得转载,更多精彩文章请订阅2016年《程序员》
本文是无人驾驶技术系列的第五篇,着重于GPS以及惯性传感器在无人驾驶中的应用。GPS是当前行车定位不可或缺的技术,但是由于GPS的误差、多路径以及更新频率低等问题,我们不能只依赖于GPS进行定位。而惯性传感器拥有很高的更新频率,可以跟GPS形成互补。而使用传感器融合技术,我们可以融合GPS与惯性传感器数据,各取所长,以达到较好的定位效果。
无人驾驶定位技术
行车定位是无人驾驶最核心的技术之一,全球定位系统(GPS)在无人驾驶定位中也担负起相当重要的职责。然而无人车是在复杂的动态环境中行驶,尤其在大城市,GPS多路径反射的问题会很明显。这样得到的GPS定位信息很容易就有几米的误差。对于在有限宽度高速行驶的汽车来说,这样的误差很有可能导致交通事故。因此我们必须借助其他传感器来辅助定位,增强定位的精度。另外,由于GPS的更新频率低(10Hz),在车辆快速行驶时很难给出精准的实时定位。
惯性传感器(IMU)是检测加速度与旋转运动的高频(1KHz)传感器,对惯性传感器数据进行处理后我们可以实时得出车辆的位移与转动信息,但惯性传感器自身也有偏差与噪音等问题影响结果。而通过使用基于卡尔曼滤波的传感器融合技术,我们可以融合GPS与惯性传感器数据,各取所长,以达到较好的定位效果。注意由于无人驾驶对可靠性和安全性要求非常高,所以基于GPS和惯性传感器的定位并非无人驾驶里唯一的定位方式,我们还会使用LiDAR点云与高精地图匹配,以及视觉里程计算法等定位方法,让各种定位法互相纠正以达到更精准的效果。
GPS简介
全球定位系统(GPS)是当前行车定位不可或缺的技术,在无人驾驶定位中也担负起相当重要的职责。GPS系统包括太空中的32颗GPS卫星,地面上1个主控站、3个数据注入站和5个监测站及作为用户端的GPS接收机。最少只需其中3颗卫星,就能迅速确定用户端在地球上所处的位置及海拔高度。现在民用GPS可以达到十米左右的定位精度。GPS系统使用低频讯号,纵使天候不佳仍能保持相当的讯号穿透性。下面解析GPS的运作原理和技术缺陷。
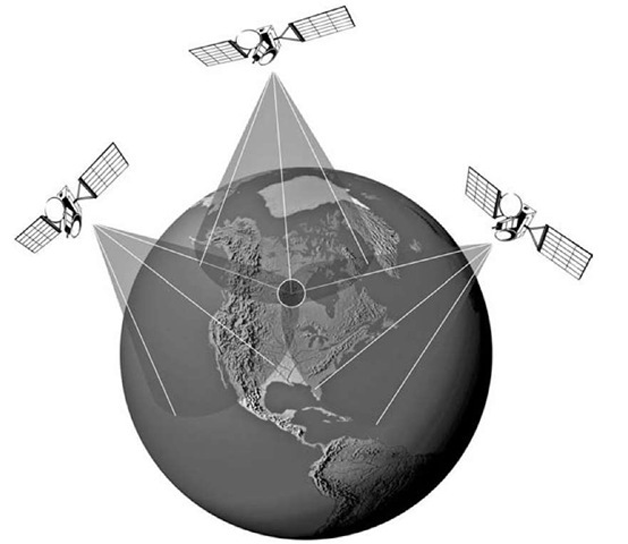
三边测量法定位
如图1所示,GPS定位系统是利用卫星基本三角定位原理、GPS接收装置以量测无线电信号的传输时间来量测距离。由每颗卫星的所在位置,测量每颗卫星至接受器间距离,便可以算出接受器所在位置之三维空间坐标值。使用者只要利用接受装置接收到3个卫
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4237
4237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









