






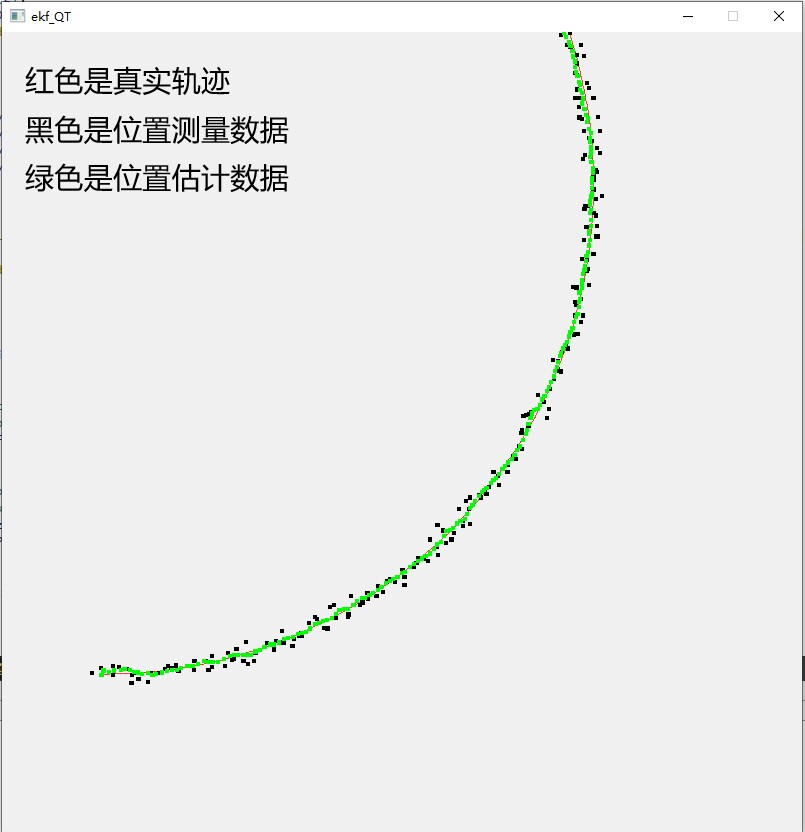
ekf 扩展卡尔曼滤波定位 qt仿真程序
粒子滤波定位
YID:6830622857944996
autorobot

扩展卡尔曼滤波(EKF)是一种常用的滤波算法,被广泛应用于定位和导航系统中。本文将围绕EKF扩展卡尔曼滤波定位和QT仿真程序展开讨论,探索其原理、应用和实现方法。
首先,让我们来了解一下EKF扩展卡尔曼滤波定位的基本原理。EKF是对卡尔曼滤波算法的扩展和改进,主要应用于非线性系统的定位问题。在传统的卡尔曼滤波中,系统模型和观测模型被假设为线性的,但实际上很多系统是非线性的。EKF通过对线性化系统模型进行近似,实现了对非线性系统的滤波和定位。
EKF扩展卡尔曼滤波定位的核心思想是基于贝叶斯滤波的思想,同时结合了卡尔曼滤波算法和非线性系统模型的线性化。滤波过程包括两个主要步骤:预测和更新。在预测步骤中,通过系统模型和运动方程预测下一时刻的状态估计值和协方差矩阵。在更新步骤中,通过观测模型和测量数据进行状态修正,得到最终的状态估计值和协方差矩阵。
在实际应用中,EKF扩展卡尔曼滤波定位常用于机器人定位、无人机导航和自动驾驶等领域。以机器人定位为例,通过激光雷达或摄像头获取环境信息,将其与地图进行匹配,从而实现机器人的精确定位和导航。EKF算法在非线性系统和噪声环境下,能够提供较为准确的定位结果。
除了EKF扩展卡尔曼滤波定位,粒子滤波定位(PF)也是一种常见的非线性滤波算法。与EKF不同,PF通过随机抽样的方式,对状态空间进行粒子采样,并通过重采样来实现对粒子的更新。相比于EKF,PF在非线性系统和非高斯噪声环境下具有更好的适应性和鲁棒性。
在QT仿真程序方面,QT是一种跨平台的C++图形用户界面开发工具,广泛应用于软件开发领域。通过QT,可以方便地实现对EKF扩展卡尔曼滤波定位算法的仿真和可视化。通过编写QT程序,可以实时显示机器人的定位结果、环境地图和传感器数据等信息,帮助开发人员进行系统调试和性能优化。
总结而言,EKF扩展卡尔曼滤波定位和QT仿真程序在定位和导航领域具有重要的应用价值。EKF算法通过对非线性系统进行线性化,实现了对非线性系统的滤波和定位。QT仿真程序则为开发人员提供了一个方便的工具,用于实现对EKF算法的仿真和可视化。未来,我们可以进一步探索EKF算法的优化和改进,以及在更复杂场景下的应用。
【相关代码,程序地址】:http://lanzoup.cn/622857944996.html















 679
679











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









