






Capon估计算法的推导
前言
本文针对2008年Xu Luzhou发表在IEEE TAES的论文《Target detection and parameter estimation for MIMO radar systems》中提到的Capon估计算法进行推导。
一. MIMO雷达系统建模
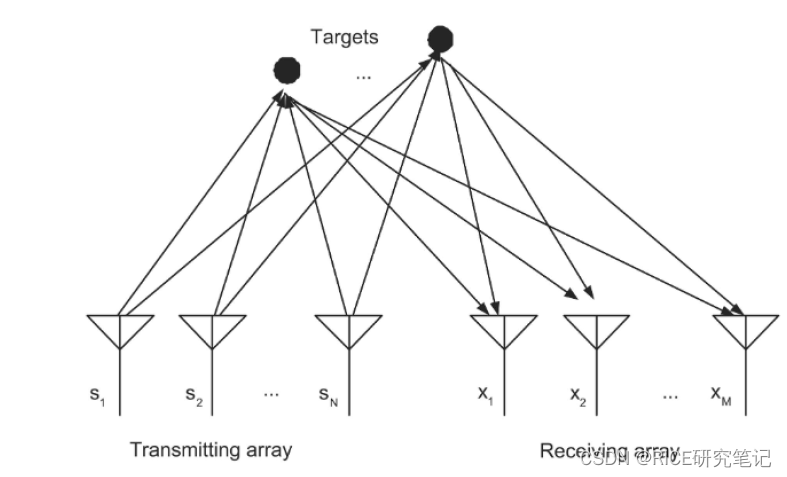
(这里直接使用论文中的场景图)MIMO窄带雷达系统配备有
N
N
N个位置任意的发射天线,
M
M
M个任意位置的接收天线。系统发射的独立波形为
s
n
∈
C
L
×
1
,
n
=
1
,
2
,
.
.
.
,
N
\mathbf{s}_n\in \mathbb{C}^{L\times 1},n=1,2,...,N
sn∈CL×1,n=1,2,...,N,其中
L
L
L是数据采样点数,发射信号矩阵
S
=
[
s
1
;
s
2
;
.
.
.
s
N
]
T
∈
C
N
×
L
\mathbf{S}=[\mathbf{s}_1\;;\mathbf{s}_2\;;...\mathbf{s}_N]^T\in\mathbb{C}^{N\times L}
S=[s1;s2;...sN]T∈CN×L。令
θ
\theta
θ表示目标的具体角度,
a
t
(
θ
)
\mathbf{a}_t(\theta)
at(θ)为发射阵列导向矢量,则目标接收到的信号为
a
t
T
(
θ
)
S
\mathbf{a}_t^T(\theta)\mathbf{S}
atT(θ)S,接收阵列输出端的信号为
X
=
a
r
(
θ
)
β
(
θ
)
a
t
T
(
θ
)
S
+
Z
(1)
\mathbf{X}=\mathbf{a}_r(\theta)\beta(\theta)\mathbf{a}_t^T(\theta)\mathbf{S}+\mathbf{Z}\tag1
X=ar(θ)β(θ)atT(θ)S+Z(1)
其中,
X
∈
C
M
×
L
\mathbf{X}\in \mathbb{C}^{M\times L}
X∈CM×L是接收的数据样本,
a
r
(
θ
)
∈
C
M
×
1
\mathbf{a}_r(\theta)\in \mathbb{C}^{M \times 1}
ar(θ)∈CM×1为接收阵列导向矢量,
β
(
θ
)
∈
C
\beta(\theta)\in \mathbb{C}
β(θ)∈C是角度为
θ
\theta
θ的目标回波复振幅,
Z
∈
C
M
×
L
\mathbf{Z}\in \mathbb{C}^{M \times L}
Z∈CM×L是随机项,包括噪声、杂波等(假设其与
θ
\theta
θ无关)。
角度估计的目的:从观测信号矩阵 X \mathbf{X} X中估计 β ( θ ) \beta(\theta) β(θ)。
二. Capon估计算法
Step1:Capon波束成形
Capon波束成形器满足的问题模型为
min
w
w
H
R
^
w
s.t.
w
H
a
r
(
θ
)
=
1
(2)
\begin{align*}\min_{\mathbf{w}}\quad &\mathbf{w}^H\hat{\mathbf{R}}\mathbf{w}\\\text{s.t.}\quad &\mathbf{w}^H\mathbf{a}_r(\theta)=1 \end{align*}\tag{2}
wmins.t.wHR^wwHar(θ)=1(2)
其中,
w
∈
C
M
×
1
\mathbf{w}\in \mathbb{C}^{M \times 1}
w∈CM×1是加权矢量,用于抑制噪声、干扰和杂波,同时保证期望信号不失真;
R
^
\hat{\mathbf{R}}
R^是观测采样数据的协方差矩阵,即
R
^
=
1
L
X
X
H
\hat{\mathbf{R}}=\frac{1}{L}\mathbf{X}\mathbf{X}^H
R^=L1XXH。
求解上述最小化问题得到最优的
w
^
c
a
p
o
n
\hat{\mathbf{w}}_{capon}
w^capon为
w
^
c
a
p
o
n
=
R
^
−
1
a
r
(
θ
)
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
(3)
\hat{\mathbf{w}}_{capon}=\frac{\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)}\tag{3}
w^capon=arH(θ)R^−1ar(θ)R^−1ar(θ)(3)
则Capon波束形成器的输出为
w
c
a
p
o
n
H
X
\mathbf{w}_{capon}^H\mathbf{X}
wcaponHX,将(1)式代入得
w
c
a
p
o
n
H
X
=
a
r
H
(
θ
)
R
^
−
1
X
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
=
a
r
H
(
θ
)
R
^
−
1
(
a
r
(
θ
)
β
(
θ
)
a
t
T
(
θ
)
S
+
Z
)
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
=
β
(
θ
)
a
t
T
(
θ
)
S
+
a
r
H
(
θ
)
R
^
−
1
Z
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
(4)
\begin{align*}\mathbf{w}_{capon}^H\mathbf{X}&=\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{X}}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)}=\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}(\mathbf{a}_r(\theta)\beta(\theta)\mathbf{a}_t^T(\theta)\mathbf{S}+\mathbf{Z})}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)}\\&=\beta(\theta)\mathbf{a}_t^T(\theta)\mathbf{S}+\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{Z}}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)} \end{align*}\tag4
wcaponHX=arH(θ)R^−1ar(θ)arH(θ)R^−1X=arH(θ)R^−1ar(θ)arH(θ)R^−1(ar(θ)β(θ)atT(θ)S+Z)=β(θ)atT(θ)S+arH(θ)R^−1ar(θ)arH(θ)R^−1Z(4)
注:若
A
\mathbf{A}
A为
n
×
n
n \times n
n×n维Hermite半正定矩阵,
X
∈
C
n
×
m
,
B
∈
C
n
×
k
,
C
∈
C
m
×
k
\mathbf{X}\in \mathbb{C}^{n \times m},\mathbf{B}\in \mathbb{C}^{n\times k},\mathbf{C}\in\mathbb{C}^{m \times k}
X∈Cn×m,B∈Cn×k,C∈Cm×k,
B
\mathbf{B}
B是列满秩矩阵(
n
≥
k
n\ge k
n≥k),则最小化问题
min
X
X
H
A
X
s.t.
X
H
B
=
C
\begin{align*}\min_{\mathbf{X}}\quad &\mathbf{X}^H\mathbf{A}\mathbf{X}\\ \text{s.t.}\quad &\mathbf{X}^H\mathbf{B}=C \end{align*}
Xmins.t.XHAXXHB=C
的唯一解为
X
0
=
A
−
1
B
(
B
H
A
−
1
B
)
−
1
C
H
\mathbf{X}_0=\mathbf{A}^{-1}\mathbf{B}(\mathbf{B}^H\mathbf{A}^{-1}\mathbf{B})^{-1}\mathbf{C}^H
X0=A−1B(BHA−1B)−1CH
特别地,当
m
=
k
=
1
m=k=1
m=k=1,即
X
\mathbf{X}
X和
B
\mathbf{B}
B都是向量,且
C
=
1
C=1
C=1的情况,
X
0
=
A
−
1
B
B
H
A
−
1
B
\mathbf{X}_0=\frac{\mathbf{A}^{-1}\mathbf{B}}{\mathbf{B}^H\mathbf{A}^{-1}\mathbf{B}}
X0=BHA−1BA−1B
Step2:最小二乘(Least Squares,LS)估计
LS的目的是使估计误差的平方和最小。假设
x
∈
C
M
×
1
\mathbf{x}\in\mathbb{C}^{M\times 1}
x∈CM×1的估计值为
x
^
=
h
θ
^
\hat{\mathbf{x}}=\mathbf{h}\hat{\theta}
x^=hθ^,其中
h
∈
C
M
×
1
\mathbf{h}\in\mathbb{C}^{M\times1}
h∈CM×1,则估计误差平方和为
J
(
θ
^
)
=
e
H
e
=
(
x
−
h
θ
^
)
H
(
x
−
h
θ
^
)
=
(
x
H
−
(
h
θ
^
)
H
)
(
x
−
h
θ
^
)
=
x
H
x
−
x
H
h
θ
^
−
(
h
θ
^
)
H
x
+
(
h
θ
^
)
H
(
h
θ
^
)
(5)
\begin{align*}J(\hat{\theta})=\mathbf{e}^H\mathbf{e}&=(\mathbf{x}-\mathbf{h}\hat{\theta})^H(\mathbf{x}-\mathbf{h}\hat{\theta}) \\&=(\mathbf{x}^H-(\mathbf{h}\hat{\theta})^H)(\mathbf{x}-\mathbf{h}\hat{\theta}) \\&=\mathbf{x}^H\mathbf{x}-\mathbf{x}^H\mathbf{h}\hat{\theta}-(\mathbf{h}\hat{\theta})^H\mathbf{x}+(\mathbf{h}\hat{\theta})^H(\mathbf{h}\hat{\theta}) \end{align*}\tag5
J(θ^)=eHe=(x−hθ^)H(x−hθ^)=(xH−(hθ^)H)(x−hθ^)=xHx−xHhθ^−(hθ^)Hx+(hθ^)H(hθ^)(5)
令
J
(
θ
^
)
J(\hat{\theta})
J(θ^)对
θ
^
\hat{\theta}
θ^求导可得,
∂
J
(
θ
^
)
∂
θ
^
=
−
h
H
x
−
h
H
x
+
(
h
H
h
+
h
H
h
)
θ
^
=
−
2
h
H
x
+
2
h
H
h
θ
^
(6)
\begin{align*}\frac{\partial J(\hat{\theta})}{\partial \hat{\theta}}&=-\mathbf{h}^H\mathbf{x}-\mathbf{h}^H\mathbf{x}+(\mathbf{h}^H\mathbf{h}+\mathbf{h}^H\mathbf{h})\hat{\theta} \\&=-2\mathbf{h}^H\mathbf{x}+2\mathbf{h}^H\mathbf{h}\hat{\theta} \end{align*}\tag6
∂θ^∂J(θ^)=−hHx−hHx+(hHh+hHh)θ^=−2hHx+2hHhθ^(6)
注:这里用到的矩阵求导公式有:
∂
x
T
a
∂
x
=
∂
a
T
x
∂
x
=
a
,
∂
x
T
B
x
∂
x
=
(
B
+
B
T
)
x
\frac{\partial \mathbf{x}^T\mathbf{a}}{\partial \mathbf{x}}=\frac{\partial \mathbf{a}^T\mathbf{x}}{\partial \mathbf{x}}=\mathbf{a},\frac{\partial \mathbf{x}^T\mathbf{B}\mathbf{x}}{\partial \mathbf{x}}=(\mathbf{B}+\mathbf{B}^T)\mathbf{x}
∂x∂xTa=∂x∂aTx=a,∂x∂xTBx=(B+BT)x。
令
∂
J
(
θ
^
)
∂
θ
^
=
0
\frac{\partial J(\hat{\theta})}{\partial \hat{\theta}}=0
∂θ^∂J(θ^)=0可得:
θ
^
=
(
h
H
h
)
−
1
h
H
x
(7)
\hat{\theta}=(\mathbf{h}^H\mathbf{h})^{-1}\mathbf{h}^H\mathbf{x}\tag7
θ^=(hHh)−1hHx(7)
由于噪声项
Z
\mathbf{Z}
Z与
θ
\theta
θ无关,因此将(1)式转化为
X
S
H
a
t
∗
(
θ
)
a
t
T
(
θ
)
S
S
H
a
t
∗
(
θ
)
=
a
r
(
θ
)
β
(
θ
)
\frac{\mathbf{X}\mathbf{S}^H\mathbf{a}_t^*(\theta)}{\mathbf{a}_t^T(\theta)\mathbf{SS}^H\mathbf{a}_t^*(\theta)}=\mathbf{a}_r(\theta)\beta(\theta)
atT(θ)SSHat∗(θ)XSHat∗(θ)=ar(θ)β(θ)并代入式(7)得,
β
L
S
(
θ
^
)
=
(
a
r
H
(
θ
)
a
r
(
θ
)
)
−
1
a
r
H
(
θ
)
X
S
H
a
t
∗
(
θ
)
a
t
T
(
θ
)
S
S
H
a
t
∗
(
θ
)
=
a
r
H
(
θ
)
X
S
H
a
t
∗
(
θ
)
∣
∣
a
r
∣
∣
2
a
t
T
(
θ
)
S
S
H
a
t
∗
(
θ
)
(8)
\begin{align*}\beta_{LS}(\hat{\theta})&=(\mathbf{a}_r^H(\theta)\mathbf{a}_r(\theta))^{-1}\mathbf{a}_r^H({\theta})\frac{\mathbf{X}\mathbf{S}^H\mathbf{a}_t^*(\theta)}{\mathbf{a}_t^T(\theta)\mathbf{SS}^H\mathbf{a}_t^*(\theta)}\\&=\frac{\mathbf{a}_r^H(\theta)\mathbf{XS}^H\mathbf{a}_t^*(\theta)}{||\mathbf{a}_r||^2\mathbf{a}_t^T(\theta)\mathbf{SS}^H\mathbf{a}_t^*(\theta)} \end{align*}\tag8
βLS(θ^)=(arH(θ)ar(θ))−1arH(θ)atT(θ)SSHat∗(θ)XSHat∗(θ)=∣∣ar∣∣2atT(θ)SSHat∗(θ)arH(θ)XSHat∗(θ)(8)
将LS方法应用于Capon波束形成器,由于噪声项
Z
\mathbf{Z}
Z与
θ
\theta
θ无关,将式(4)转化为
a
r
H
(
θ
)
R
^
−
1
X
S
H
a
t
∗
(
θ
)
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
a
t
T
(
θ
)
S
S
H
a
t
∗
(
θ
)
=
β
(
θ
)
\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{X}\mathbf{S}^H\mathbf{a}_t^*(\theta)}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)\mathbf{a}_t^T(\theta)\mathbf{SS}^H\mathbf{a}_t^*(\theta)}=\beta(\theta)
arH(θ)R^−1ar(θ)atT(θ)SSHat∗(θ)arH(θ)R^−1XSHat∗(θ)=β(θ)并代入式(7)得到最小二乘Capon估计值为:
β
c
a
p
o
n
(
θ
^
)
=
a
r
H
(
θ
)
R
^
−
1
X
S
H
a
t
∗
(
θ
)
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
a
t
T
(
θ
)
S
S
H
a
t
∗
(
θ
)
=
a
r
H
(
θ
)
R
^
−
1
X
S
H
a
t
∗
(
θ
)
L
[
a
r
H
(
θ
)
R
^
−
1
a
r
(
θ
)
]
[
a
t
T
(
θ
)
R
^
s
s
a
t
∗
(
θ
)
]
(9)
\begin{align*}\beta_{capon}(\hat{\theta})&=\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{XS}^H\mathbf{a}_t^*(\theta)}{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)\mathbf{a}_t^T(\theta)\mathbf{SS}^H\mathbf{a}_t^*(\theta)}\\&=\frac{\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{XS}^H\mathbf{a}_t^*(\theta)}{L[\mathbf{a}_r^H(\theta)\hat{\mathbf{R}}^{-1}\mathbf{a}_r(\theta)][\mathbf{a}_t^T(\theta)\hat{\mathbf{R}}_{ss}\mathbf{a}_t^*(\theta)]} \end{align*}\tag9
βcapon(θ^)=arH(θ)R^−1ar(θ)atT(θ)SSHat∗(θ)arH(θ)R^−1XSHat∗(θ)=L[arH(θ)R^−1ar(θ)][atT(θ)R^ssat∗(θ)]arH(θ)R^−1XSHat∗(θ)(9)
其中, R ^ s s = 1 L S S H \hat{\mathbf{R}}_{ss}=\frac{1}{L}\mathbf{SS}^H R^ss=L1SSH。
参考文献
[1] XU L, LI J, STOICA P. Target detection and parameter estimation for MIMO radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 927-939.
[2] STOICA P, MOSES R L. Spectral analysis of signals[M]. Upper Saddle River, N.J: Pearson/Prentice Hall, 2005.















 7585
7585











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









