






和CNN不同的是,RNN用于前后具有相关联性质的序列的。所以这里我们只能把每幅图像横向剪切,每一行当成一列。如下图所示:

每个横向的像素作为序列。然后输入到RNN模型中。由于考虑到数据过大,所以先使用了CNN对其进行处理,CNN层会输出一个16*16*53*53的矩阵。
RNN模型的超参数
BATCH_SIZE = 32 # 每批处理的数据
DEVICE = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
EPOCHS = 15 # 训练数据集的轮次
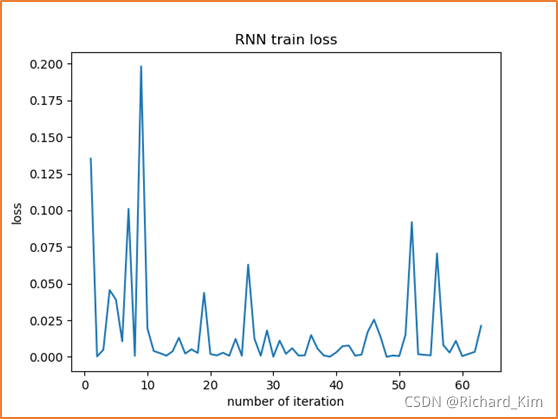
1. 最后一个epoch(第15个epoch)时候的训练集的损失率
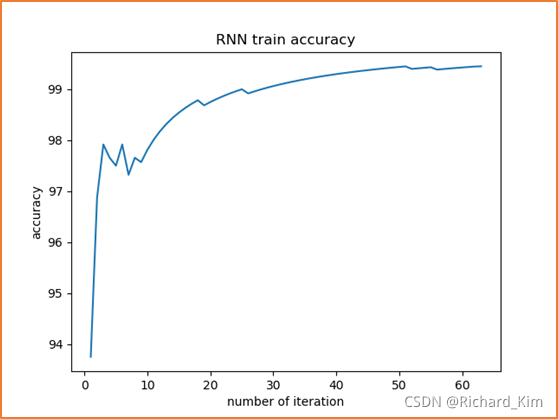
2. 最后一个epoch时候的训练准确率
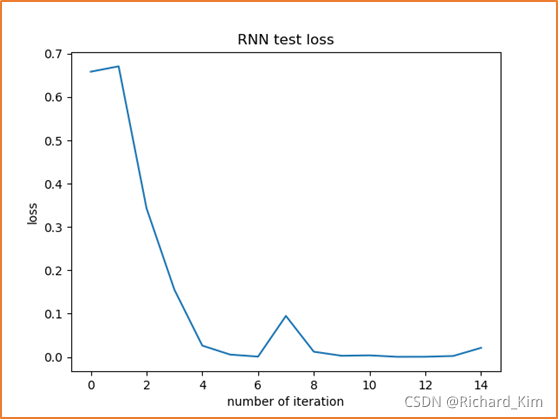
3. 总共15个epoch,每次epoch之后都测试一次,得到15次的loss
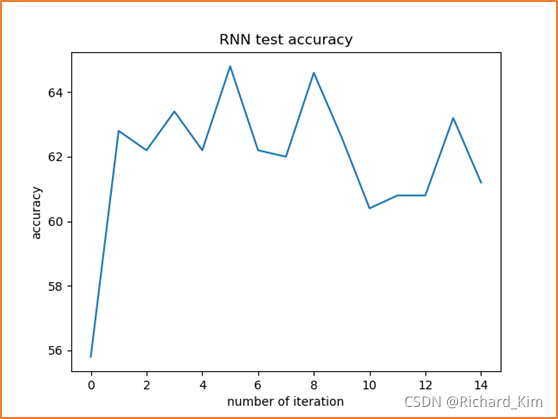
4. 每次训练完epoch之后在测试集的准确度
#!/usr/bin/env python
# -#-coding:utf-8 -*-
# author: vv
# datetime:2021/10/15 17:18:37
# software:PyCharm
"""
模型1:Pytorch RNN 实现流程
1.图片数据处理,加载数据集
2.使得数据集可迭代(每次读取一个Batch)
3.创建模型类
4.初始化模型类
5.初始化损失类
6.训练模型
"""
# 1.加载库
import os
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import torchvision
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
import matplotlib.pyplot as plt
# 2.定义超参数
BATCH_SIZE = 32 # 每批处理的数据
DEVICE = torch.device('cuda' if torch.cuda.is_available() else 'cpu') # 放在cuda或者cpu上训练
EPOCHS = 15 # 训练数据集的轮次
# 3.构建pipeline,对图像做处理
pipeline = transforms.Compose([
# 彩色图像转灰度图像num_output_channels默认1
# transforms.Grayscale(num_output_channels=1),
# 分辨率重置为256
transforms.Resize(256),
# 对加载的图像作归一化处理, 并裁剪为[224x224x3]大小的图像(因为这图片像素不一致直接统一)
transforms.CenterCrop(224),
# 将图片转成tensor
transforms.ToTensor(),
# 正则化,模型出现过拟合现象时,降低模型复杂度
transforms.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225])
])
# 图片路径(训练图片和测试图片的)
base_dir_train = 'data/train'
base_dir_test = 'data/val'
# 打印一下训练图片猫狗各多少张图片
print('train dogs total images : %d' % (len(os.listdir(base_dir_train + '\\dog'))))
print('train cats total images : %d' % (len(os.listdir(base_dir_train + '\\cat'))))
print('test cats total images : %d' % (len(os.listdir(base_dir_test + '\\cat'))))
print('test dogs total images : %d' % (len(os.listdir(base_dir_test + '\\dog'))))
# 4. 加载数据集
"""
训练集,猫是0,狗是1,ImageFolder方法自己分类的,关于ImageFolder详见:
https://blog.csdn.net/weixin_42147780/article/details/102683053?utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-2.no_search_link&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7ECTRLIST%7Edefault-2.no_search_link
"""
train_dataset = datasets.ImageFolder(root=base_dir_train, transform=pipeline)
print("train_dataset=" + repr(train_dataset[1][0].size()))
print("train_dataset.class_to_idx=" + repr(train_dataset.class_to_idx))
# 创建训练集的可迭代对象,一个batch_size地读取数据,shuffle设为True表示随机打乱顺序读取
train_loader = DataLoader(train_dataset, batch_size=BATCH_SIZE, shuffle=True)
# 测试集
test_dataset = datasets.ImageFolder(root=base_dir_test, transform=pipeline)
# print(test_dataset)
print("test_dataset=" + repr(test_dataset[1][0].size()))
print("test_dataset.class_to_idx=" + repr(test_dataset.class_to_idx))
# 创建测试集的可迭代对象,一个batch_size地读取数据
test_loader = DataLoader(test_dataset, batch_size=BATCH_SIZE, shuffle=True)
# 获得一批测试集的数据
images, labels = next(iter(test_loader))
print("images shape", images.shape)
print("labels shape", labels.shape)
# 5.定义函数,显示一批图片
def imShow(inp, title=None):
# tensor转成numpy,transpose转成(通道数,长,宽)
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406]) # 均值
std = np.array([0.229, 0.224, 0.225]) # 标准差
inp = std * inp + mean
inp = np.clip(inp, 0, 1) # 像素值限制在0-1之间
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001)
# 网格显示
out = torchvision.utils.make_grid(images)
imShow(out)
# 6.定义RNN网络
class RNN_Model(nn.Module):
def __init__(self, input_dim, hidden_dim, layer_dim, output_dim):
super(RNN_Model, self).__init__()
# 卷积层1:输入是224*224*3 计算(224-5)/1+1=220 即通过Conv1输出的结果是220
self.conv1 = nn.Conv2d(3, 6, 5) # input:3 output6 kernel:5
# 池化层:输入是220*220*6 窗口2*2 计算(220-0)/2=110 那么通过max_pooling层输出的是110*110*6
self.pool = nn.MaxPool2d(2, 2)
# 卷积层2, 输入是220*220*6,计算(110 - 5)/ 1 + 1 = 106,那么通过conv2输出的结果是106*106*16
self.conv2 = nn.Conv2d(6, 16, 5) # input:6, output:16, kernel:5
# 以下是RNN的属性
self.hidden_dim = hidden_dim
self.layer_dim = layer_dim
"""
batch_first:当 batch_first设置为True时,输入的参数顺序变为:
x:[batch, seq_len, input_size],
h0:[batch, num_layers, hidden_size]。
"""
self.rnn = nn.RNN(input_dim, hidden_dim, layer_dim, batch_first=True, nonlinearity='relu')
# 全连接层
self.fc1 = nn.Linear(hidden_dim, output_dim)
def forward(self, x):
# 卷积1
"""
224x224x3 --> 110x110x6 -->106x106*6
"""
x = self.pool(F.relu(self.conv1(x)))
# 卷积2
"""
106x106x6 --> 53x53x16
"""
x = self.pool(F.relu(self.conv2(x)))
# print("x shape After CNN", x.shape)
# x = x.reshape(x.size(0), 1, -1) # 下面可以换成这句
x = x.view(x.size(0), 1, -1)
# print("x.size(0) = ", x.size(0))
# print("x data After CNN and reshape", x.data)
# 初始化隐藏层状态 (layer_dim,batch_size,hidden_dim),梯度运算
h0 = torch.zeros(self.layer_dim, x.size(0), self.hidden_dim).requires_grad_().to(DEVICE)
"""
RNN的权值并不是单一连续的,这些权值在每一次RNN被调用的时候都会被压缩,
会很大程度上增加显存消耗。警告里也给出了解决办法,
使用flatten_parameters()把权重存成连续的形式,可以提高内存利用率。
"""
self.rnn.flatten_parameters()
# print("x shape After CNN", x.shape)
# 分类隐藏状态,避免梯度爆炸
out, hn = self.rnn(x, h0.detach())
# out,hn = self.rnn(x)
# print("out size", out.shape)
"""
输出可以是Y向量,也可以是最后一个时刻隐含层的输出hT
如果输出是Y向量,如下图所示,那么Y向量的结构为
out:[seq_len, batch, hidden_size].
如果输出是最后一个时刻隐含层的输出h T h_Th
如下图所示,那么h_t:[num_layers, batch, hidden_size],与h0结构一样
下面的代码只要最后一层的状态ht
"""
out = self.fc1(out[:, -1, :]) # 中间的序列长度取-1,表示取序列中的最后一个数据,这个数据长度为hidden_dim,
# print("after fc1 out size", out.shape) # out size torch.Size([48, 2])
# print("hn size", hn.shape)
return out
# 7.初始化模型
input_dim = 44944 # 输入维度(输入的节点数量)
hidden_dim = 100 # 隐藏层的维度(每个隐藏层的节点数)
layer_dim = 2 # 2层RNN(隐藏层的数量 2层)
out_dim = 2 # 输出维度
rnn_model = RNN_Model(input_dim, hidden_dim, layer_dim, out_dim)
# 8.输出模型参数信息
length = len(list(rnn_model.parameters()))
print(length)
# 9.输出模型参数信息
length = len(list(rnn_model.parameters()))
print(length)
# 优化器
# optimizer = optim.SGD(rnn_model.parameters(), lr=1e-3, momentum=0.9)
optimizer = optim.Adam(rnn_model.parameters(), lr=1e-3, betas=(0.9, 0.99))
# 损失函数,交叉熵损失函数
criterion = nn.CrossEntropyLoss()
# 把损失,准确度,迭代都记录出list,然后讲loss和准确度画出图像
sequence_dim = 53
train_loss_list = []
train_accuracy_list = []
train_iteration_list = []
test_loss_list = []
test_accuracy_list = []
test_iteration_list = []
iteration = 0
# for i, (imgs, labels) in enumerate(test_loader):
# # print("imgs=" + repr(imgs))
# print("labels=" + repr(labels))
# print("i=" + repr(i))
# 训练
# """
for epoch in range(EPOCHS):
# 用来显示训练的loss correct等
train_correct = 0.0
train_total = 0.0
for i, (imgs, labels) in enumerate(train_loader):
# 声明训练,loss等只能在train mode下进行运算
rnn_model.train()
# 把训练的数据集合都扔到对应的设备去
# imgs = imgs.view(-1,1,sequence_dim, input_dim).requires_grad_().to(DEVICE)
# print("imgs shape", imgs.shape)
# print("imgs = ", imgs.data)
imgs = imgs.to(DEVICE)
labels = labels.to(DEVICE)
# 防止梯度爆炸,梯度清零
optimizer.zero_grad()
# 前向传播
rnn_model = rnn_model.cuda() # 这里要从cuda()中取得,不然前面都放在cuda后面放在cpu,会报错,报“不在同一个设备的错误" Input and parameter tensors are not at the same device, found input tensor at cuda:0 and parameter tensor at cpu
output = rnn_model(imgs)
# print("RNN output shape", out.shape)
# print("label shape", labels.shape)
# 计算损失
loss = criterion(output, labels)
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
# 计算训练时候的准确度
train_predict = torch.max(output.data, 1)[1]
if torch.cuda.is_available():
train_correct += (train_predict.cuda() == labels.cuda()).sum()
else:
train_correct += (train_predict == labels).sum()
train_total += labels.size(0)
accuracy = train_correct / train_total * 100.0
# 只画出最后一次epoch的
if (epoch + 1) == EPOCHS:
# 迭代计数器++
iteration += 1
train_accuracy_list.append(accuracy)
train_iteration_list.append(iteration)
train_loss_list.append(loss)
# 打印信息
print("Epoch :%d , Batch : %5d , Loss : %.8f,train_correct:%d,train_total:%d,accuracy:%.6f" % (
epoch + 1, i + 1, loss.item(), train_correct, train_total, accuracy))
print("==========================预测开始===========================")
rnn_model.eval()
# 验证accuracy
correct = 0.0
total = 0.0
# 迭代测试集 获取数据 预测
for j, (datas, targets) in enumerate(test_loader):
datas = datas.to(DEVICE)
targets = targets.to(DEVICE)
# datas = datas.view(-1, sequence_dim, input_dim).requires_grad_().to(DEVICE)
# datas = datas.reshape(datas.size(0), 1, -1)
# 模型预测
outputs = rnn_model(datas)
# 防止梯度爆炸,梯度清零
optimizer.zero_grad()
# 获取测试概率最大值的下标
predicted = torch.max(outputs.data, 1)[1]
# 统计计算测试集合
total += targets.size(0)
if torch.cuda.is_available():
# print(predicted.cuda() == targets.cuda())
correct += (predicted.cuda() == targets.cuda()).sum()
else:
correct += (predicted == targets).sum()
accuracy = correct / total * 100.0
test_accuracy_list.append(accuracy)
test_loss_list.append(loss.item())
test_iteration_list.append(epoch)
print("TEST--->loop : {}, Loss : {}, correct:{}, total:{}, Accuracy : {}".format(iteration, loss.item(), correct,
total, accuracy))
# 可视化训练集loss
plt.figure(1)
plt.plot(train_iteration_list, train_loss_list)
plt.xlabel("number of iteration")
plt.ylabel("loss")
plt.title("RNN train loss")
plt.show()
# 可视化训练集accuracy
plt.figure(2)
plt.plot(train_iteration_list, train_accuracy_list)
plt.xlabel('number of iteration')
plt.ylabel('accuracy')
plt.title('RNN train accuracy')
plt.show()
# 可视化测试集loss
plt.figure(3)
plt.plot(test_iteration_list, test_loss_list)
plt.xlabel('number of iteration')
plt.ylabel('loss')
plt.title('RNN test loss')
plt.show()
# 可视化测试集accuracy
plt.figure(4)
plt.plot(test_iteration_list, test_accuracy_list)
plt.xlabel('number of iteration')
plt.ylabel('accuracy')
plt.title('RNN test accuracy')
plt.show()

















 4678
4678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









