







机器学习笔记系列
可以从上至下按顺序看喔
- 回归笔记:机器学习-回归算法笔记
- 分类笔记:机器学习-分类算法笔记
有监督学习
含义
-
给算法一个数据集,其中包含了正确的答案,告诉算法啥是对的啥是错的
-
我们想要在监督学习中,对于数据集中的每个样本,我们想要算法预测,并得出正确答案
神经网络
人工神经元
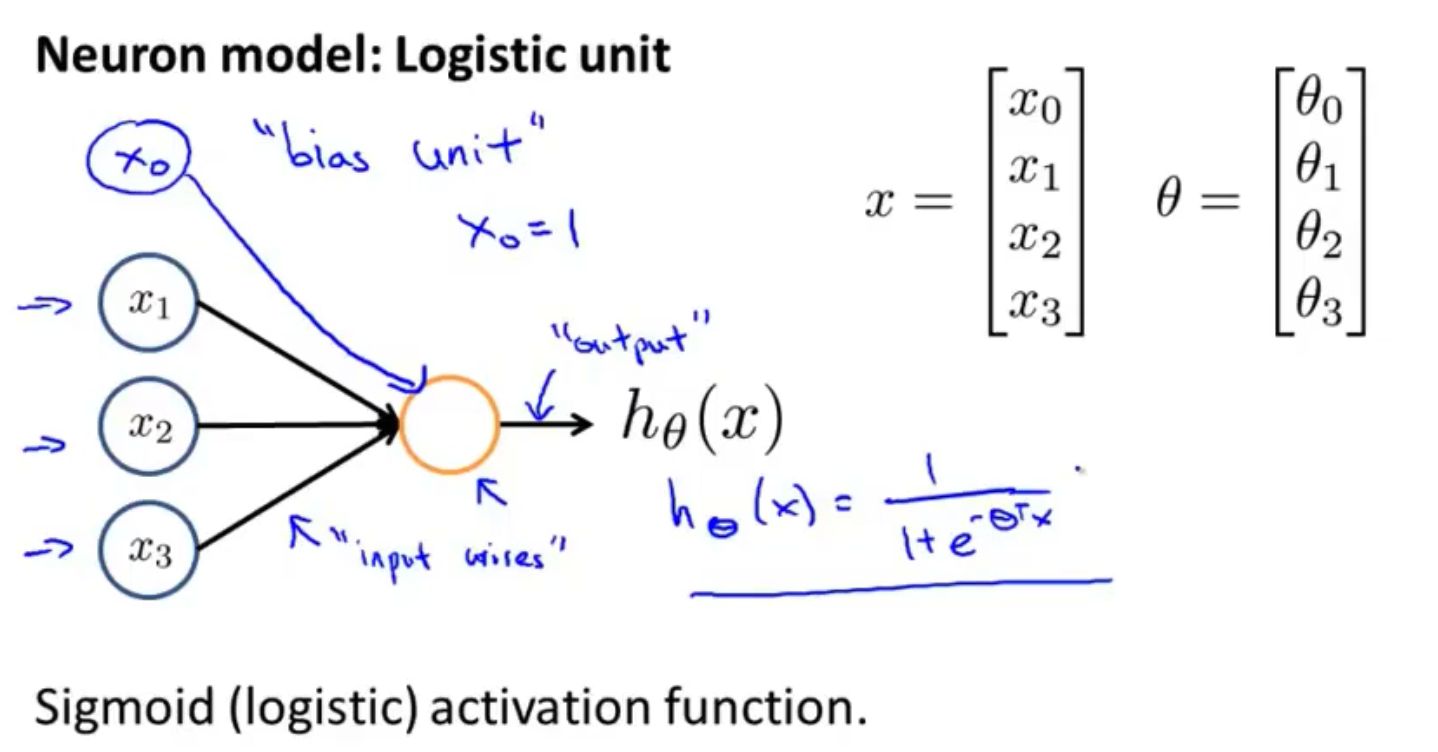
- 上图中的x0是“偏置单元”, 上图名称为“带有sigmoid激活函数的人工神经元”,且为单个神经元
- 激活函数:像sigmoid函数等一些非线性函数的别称
- x为我们的输入单元,theta为我们的参数(权重)
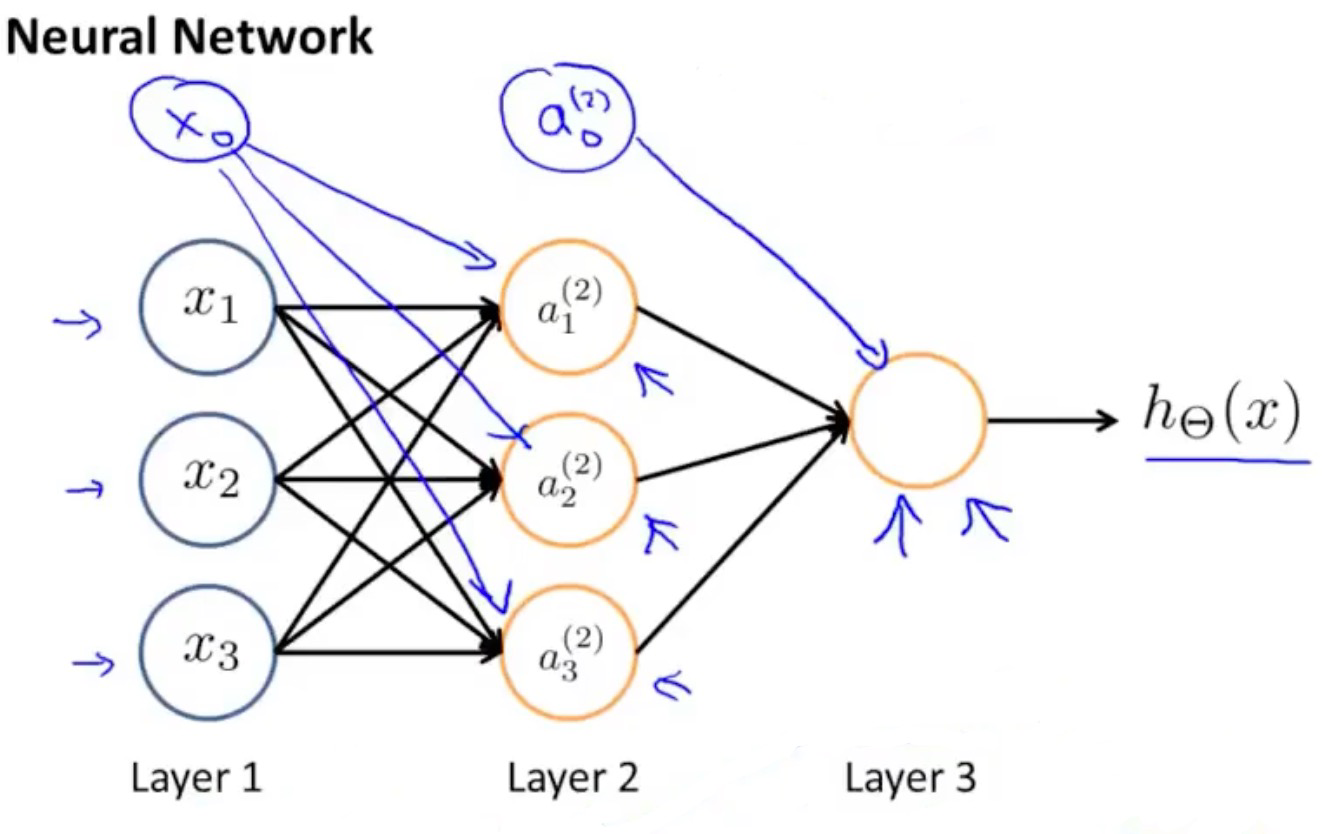
神经网络
-
神经网络是由多个神经元所构成的,如下图所示
-
-
其中的层一为输入层,层二为隐藏层,层三为输出层
-
为什么叫隐藏层?
- 因为该层的值在训练集里是看不到,所以叫隐藏层
- 一个神经网络可拥有多个隐藏层,实际上除了输入层与输出层以外的都叫隐藏层
-
既然隐藏层的值在训练集看不到,可以通过以下计算出隐藏层的值
- a 1 ( 2 ) = g ( Θ 10 ( 1 ) x 0 + Θ 11 ( 1 ) x 1 + Θ 12 ( 1 ) x 2 + Θ 13 ( 1 ) x 3 ) a_1^{(2)}=g(\Theta_{10}^{(1)}x_0+\Theta_{11}^{(1)}x_1+\Theta_{12}^{(1)}x_2+\Theta_{13}^{(1)}x_3) a1(2)=g(Θ10(1)x0+Θ11(1)x1+Θ12(1)x2+Θ13(1)x3)
- a 2 ( 2 ) = g ( Θ 20 ( 1 ) x 0 + Θ 21 ( 1 ) x 1 + Θ 22 ( 1 ) x 2 + Θ 23 ( 1 ) x 3 ) a_2^{(2)}=g(\Theta_{20}^{(1)}x_0+\Theta_{21}^{(1)}x_1+\Theta_{22}^{(1)}x_2+\Theta_{23}^{(1)}x_3) a2(2)=g(Θ20(1)x0+Θ21(1)x1+Θ22(1)x2+Θ23(1)x3)
- a 3 ( 2 ) = g ( Θ 30 ( 1 ) x 0 + Θ 31 ( 1 ) x 1 + Θ 32 ( 1 ) x 2 + Θ 33 ( 1 ) x 3 ) a_3^{(2)}=g(\Theta_{30}^{(1)}x_0+\Theta_{31}^{(1)}x_1+\Theta_{32}^{(1)}x_2+\Theta_{33}^{(1)}x_3) a3(2)=g(Θ30(1)x0+Θ31(1)x1+Θ32(1)x2+Θ33(1)x3)
- h Θ ( x ) = a 1 ( 3 ) = g ( Θ 10 ( 2 ) a 0 ( 2 ) + Θ 11 ( 2 ) a 1 ( 2 ) + Θ 12 ( 2 ) a 2 ( 2 ) + Θ 13 ( 2 ) a 3 ( 2 ) ) h_\Theta(x)=a_1^{(3)}=g(\Theta_{10}^{(2)}a_0^{(2)}+\Theta_{11}^{(2)}a_1^{(2)}+\Theta_{12}^{(2)}a_2^{(2)}+\Theta_{13}^{(2)}a_3^{(2)}) hΘ(x)=a1(3)=g(Θ10(2)a0(2)+Θ11(2)a1(2)+Θ12(2)a2(2)+Θ13(2)a3(2))
- 可以看出以上计算可以统一归一到一个矩阵的计算,我们可以将其向量化一下
- Θ ( 1 ) = [ Θ 10 ( 1 ) Θ 11 ( 1 ) Θ 12 ( 1 ) Θ 13 ( 1 ) Θ 20 ( 1 ) Θ 21 ( 1 ) Θ 22 ( 1 ) Θ 23 ( 1 ) Θ 30 ( 1 ) Θ 31 ( 1 ) Θ 32 ( 1 ) Θ 33 ( 1 ) ] , X = [ x 0 x 1 x 2 x 3 ] , Z ( 2 ) = [ z 1 ( 2 ) z 2 ( 2 ) z 3 ( 2 ) ] , A ( 2 ) = [ a 0 ( 2 ) a 1 ( 2 ) a 2 ( 2 ) a 3 ( 2 ) ] \Theta^{(1)}=\begin{bmatrix}\Theta_{10}^{(1)}&\Theta_{11}^{(1)}&\Theta_{12}^{(1)}&\Theta_{13}^{(1)}\\\Theta_{20}^{(1)}&\Theta_{21}^{(1)}&\Theta_{22}^{(1)}&\Theta_{23}^{(1)}\\\Theta_{30}^{(1)}&\Theta_{31}^{(1)}&\Theta_{32}^{(1)}&\Theta_{33}^{(1)}\end{bmatrix},\ X=\begin{bmatrix}x_0\\x_1\\x_2\\x_3\end{bmatrix},\ Z^{(2)}=\begin{bmatrix}z_1^{(2)}\\z_2^{(2)}\\z_3^{(2)}\end{bmatrix},\ A^{(2)}=\begin{bmatrix}a_0^{(2)}\\a_1^{(2)}\\a_2^{(2)}\\a_3^{(2)}\end{bmatrix} Θ(1)= Θ10(1)Θ20(1)Θ30(1)Θ11(<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1085
1085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









