






kalman滤波器
已经写好了已经在STM32中实现了。
大家可以直接调用。
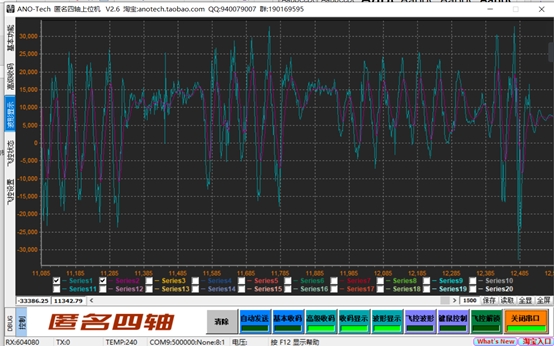
图三是6050滤波之后的效果对比。
由于我的6050误差较大所以我的参数是更加倾向于预测值。
当然大家可以对6050的数据先经过巴特沃思低通滤波器之后再过卡尔曼滤波器。
巴特沃思滤波器在我另外的链接中。
主图是发货的内容。
ID:96200654956684684
Bliiiink
卡尔曼滤波器在STM32上的应用
引言
在嵌入式系统中,传感器数据的准确性对于实现精确的姿态估计和位置跟踪至关重要。然而,由于硬件和环境等因素的影响,传感器数据常常存在噪声和误差。为了提高数据的准确性,我们可以采用滤波器来对传感器数据进行处理。本文将介绍一种常用的滤波算法——卡尔曼滤波器,并讨论其在STM32嵌入式系统中的应用。
卡尔曼滤波器原理简介
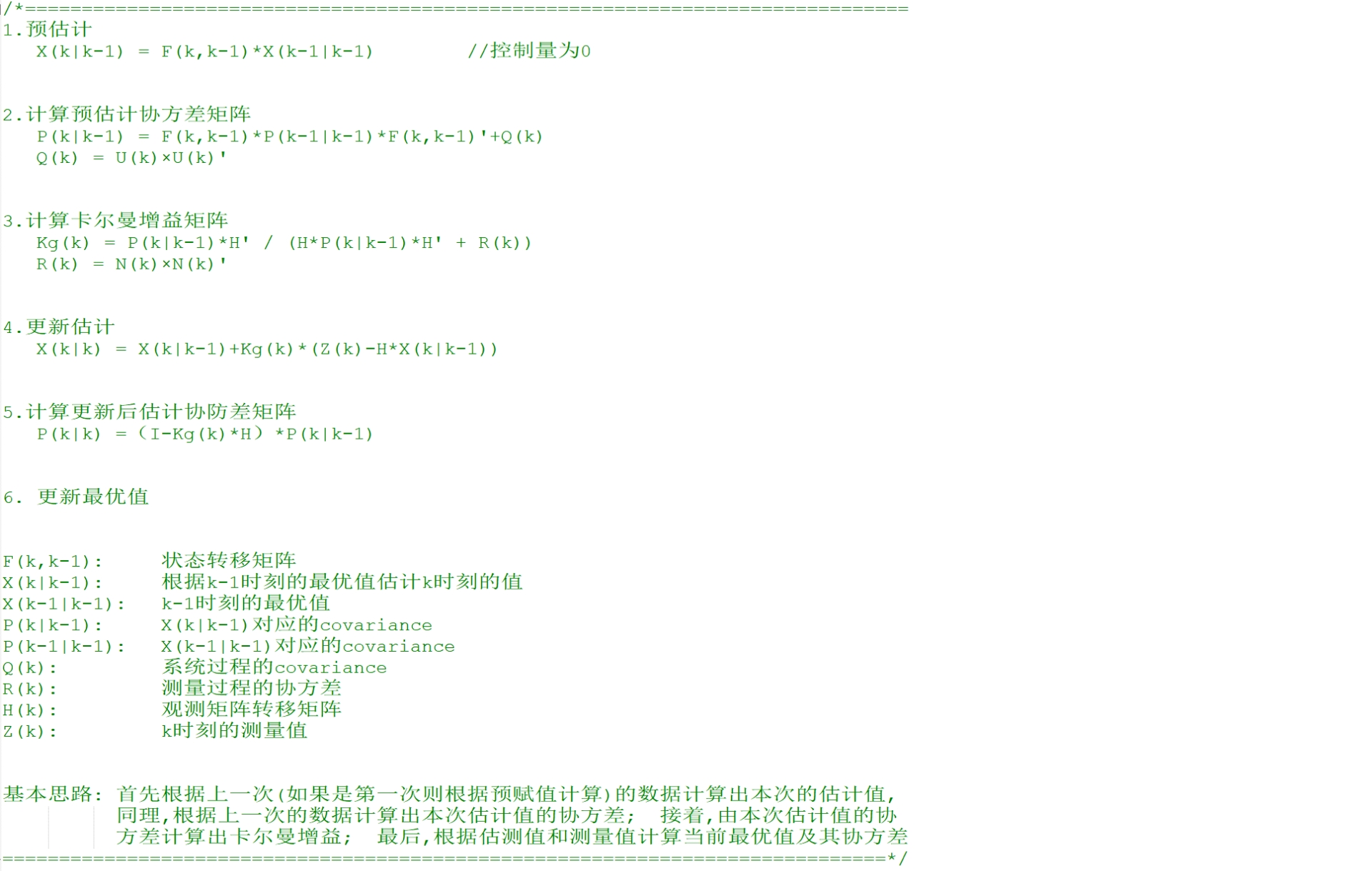
卡尔曼滤波器是一种基于状态空间模型的递归滤波器。它通过将系统的状态和观测值进行融合,可以估计出系统的最优状态。卡尔曼滤波器有两个主要步骤:预测和更新。
预测步骤中,卡尔曼滤波器使用系统的状态转移方程来计算出系统在下一时刻的状态估计。通过预测当前状态,可以得到一个对当前观测值的预测。
更新步骤中,卡尔曼滤波器使用观测值和预测值之间的差异,校正当前状态的估计。通过校正当前状态,可以提高对下一时刻观测值的准确性。
在STM32中使用卡尔曼滤波器
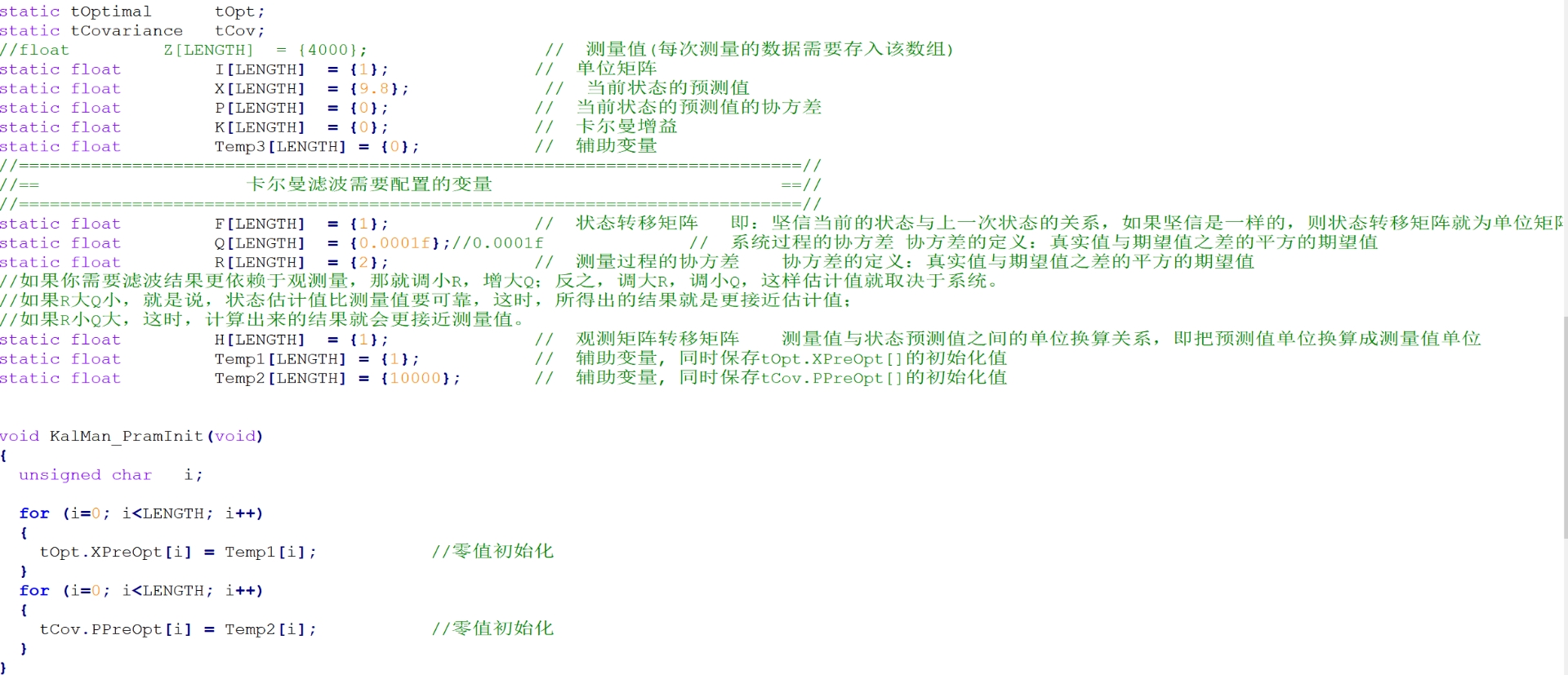
本文实现了卡尔曼滤波器在STM32嵌入式系统中的应用,具体步骤如下。
第一步:初始化
在使用卡尔曼滤波器前,需要初始化滤波器的参数。这些参数包括系统的状态转移矩阵、观测矩阵、过程噪声方差、观测噪声方差等。根据实际应用需求和传感器的特性,可以调整这些参数以达到最佳的滤波效果。
第二步:预测
在每个时间步骤中,卡尔曼滤波器首先根据系统的状态转移矩阵预测下一时刻的状态估计。这个预测值是当前状态的最优估计。
第三步:更新
接下来,卡尔曼滤波器将观测到的数据与预测值进行比较,并计算出预测值与实际观测值之间的差异。利用这个差异,卡尔曼滤波器可以校正当前状态的估计,得到更加准确的状态估计。
实验结果与讨论
本文使用卡尔曼滤波器对6050传感器数据进行滤波,并将滤波结果与原始数据进行对比。图三展示了滤波后的效果对比,可以观察到滤波后的数据比原始数据更加平滑,噪声和误差得到了一定程度的减小。
需要注意的是,由于我的6050传感器存在较大的误差,所以我的参数设置更倾向于预测值。当然,对于6050的数据,大家也可以先经过巴特沃思低通滤波器再经过卡尔曼滤波器处理,以进一步提高数据的准确性。巴特沃思滤波器的详细信息可以参考我另外的链接。
结论
本文介绍了卡尔曼滤波器在STM32嵌入式系统中的应用。通过对传感器数据的滤波处理,可以提高数据的准确性,为姿态估计和位置跟踪等应用提供更可靠的数据支持。尽管卡尔曼滤波器需要合理的参数设置和对系统模型的合理假设,但在实际应用中已经得到了广泛的应用和验证。
参考链接:
- 巴特沃思低通滤波器链接(此处省略参考链接)
感谢大家的阅读,希望本文对大家理解和应用卡尔曼滤波器有所帮助。如有任何问题或意见,欢迎留言讨论。
相关的代码,程序地址如下:http://coupd.cn/654956684684.html
















 452
452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









