






写在前面:
我是南昌航空大学洪鹰战队22级电控组成员,在学习和备赛的过程中使用过很多开发环境,从Keil到CubeIDE,再到VScode,最后还是觉得VScode使用起来比较方便。在24赛季的备赛过程中,我们接触并使用了湖南大学跃鹿战队的开源电控框架basic_framework,感受到了使用Ozone进行调试的方便性,由此产生了探索的小兴趣。
在联盟赛结束后我开始探索Ubuntu系统下的STM32开发环境的搭建,并在一次次试错中总结出了一个较为方便的开发环境搭建过程,故写下此篇博客用以记录,方便后面重装系统后能够快速重建开发环境,也为从事相关开发工作的同学们提供一个思路。
在此感谢湖南大学跃鹿战队电控开源框架basic_framework提供的环境搭建思路,附上框架链接:basic_framework: Hey this is the basic frame work for robomaster standard infantry Robots! enjoy using it, have fun developing Robot with us![]() https://gitee.com/hnuyuelurm/basic_framework
https://gitee.com/hnuyuelurm/basic_framework
仓库链接更新:
Github链接:
一、Ubuntu系统的安装
1、启动盘的制作和双系统的安装
这里推荐一个b站的视频,这个UP主讲的非常细,Ubuntu的启动盘制作可以参考这个视频
(建议:关于内存分布这块,建议至少120G,且直接挂载一个根节点,能提高内存空间利用率)
Windows 和 Ubuntu 双系统的安装和卸载_哔哩哔哩_bilibiliWindows 和 Ubuntu 双系统的安装和卸载共计16条视频,包括:双系统启动效果、下载Ubuntu系统镜像、下载安装镜像工具等,UP主更多精彩视频,请关注UP账号。![]() https://www.bilibili.com/video/BV1554y1n7zv/?spm_id_from=333.1007.top_right_bar_window_custom_collection.content.click&vd_source=db1d1f91faddd9a92b98355deb2f94a6(建议:自备一个大容量高速U盘,每隔一段时间将自己重要的资料或工程文件都在U盘里备份一份,因为永远不知道Ubuntu会在什么时候突然崩溃)
https://www.bilibili.com/video/BV1554y1n7zv/?spm_id_from=333.1007.top_right_bar_window_custom_collection.content.click&vd_source=db1d1f91faddd9a92b98355deb2f94a6(建议:自备一个大容量高速U盘,每隔一段时间将自己重要的资料或工程文件都在U盘里备份一份,因为永远不知道Ubuntu会在什么时候突然崩溃)
2、拯救者BIOS启动
因为我的电脑是拯救者的,所以当时启动安装时,为保险起见专门找了拯救者的BIOS启动相关注意事项,以供大家参考
3、更改Ubuntu的时间
双系统会导致Ubuntu比Windows的时间快8小时,而Windows的时间比Ubuntu慢8小时,所以需要解决系统时间同步的问题。还是第一次分享的那个视频,后面有一节讲到了时间同步的问题。
(建议:打开字幕观看,因为有些莫名出现的问题,会在弹幕里有解答)
二、配置C/C++环境
打开终端,以此输入以下命令来安装gcc、g++、gdb
1、安装gcc
sudo apt-get install gcc2、安装g++
sudo apt-get install g++3、安装gdb(调试用)
sudo apt-get install gdb4、运行以下三条命令来看是否安装成功
gcc -v
g++ -v
gdb -v
5、可以使用vim或gedit来编写一段简单的代码运行一下(可跳过)
对于代码或一个工程,最好是使用专属的文件夹来进行分类管理,这样会显得很有条理,管理起来也方便。例如在此处,我在主目录下创建了/Project/CxC++/test,test即是我的工程文件名,在这里面我们写一个C++程序来进行简单的验证。(以vim为例)
(1)使用vim创建hello.cpp
vim hello.cpp(2)如果没有vim则先安装vim
sudo apt-get install vim(3)成功创建hello.cpp后,进行代码编写:
关于vim的操作,感兴趣的同学可以上网搜索相关资料进行学习,在这里我就不班门弄斧了,简单的操作一下:
1、使用vim创建hello.cpp后,可以看到如下的场景
2、按下“i”键,进入编辑模式(左下角也有提示“插入”)

3、进行简单的代码编写
4、编辑完成后,先按一次“ESC”,此时左下角的“插入”会消失,然后同时按下“Shift”和“:”键,待下方出现“:”后,输入wq,然后按下回车。(wq表示保存并退出)

5、编写完成后,执行下面的命令对cpp文件进行编译
g++ -o hello hello.cpp
6、执行编译好的.o文件,验证运行效果

三、安装、配置VScode
1、前往VScode的官网进行下载,注意选择下载.deb
2、下载完成之后,在所属文件夹打开终端(一般默认是在“下载”里的)
3、执行如下命令,安装VScode,注意后面的.deb文件版本要对应自己所下载的版本,我这里以1.89为例(dpkg是Debian 系统中的软件包管理工具,感兴趣的可以自己去了解,这里就不多赘述了)
sudo dpkg -i code_1.89.0-1714530869_amd64.deb
4、打开VScode,安装必要的插件
(1)简体中文插件,一般首次进入后都会在右下角提示你安装的,如果没有提示就自己去搜索安装(注:安装完后需要重启软件才会生效)
(2)在左侧扩展商店中搜索“C/C++”,选择第一个进行安装
5、 创建一个新工程,并使用VScode打开,创建第一个.cpp文件进行测试
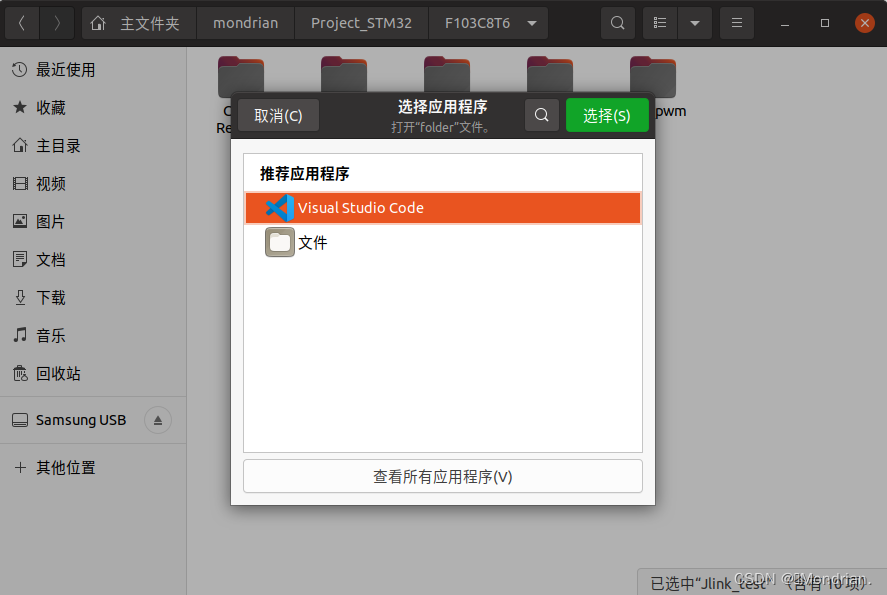
(1)我这里以创建一个test1文件夹为例(新建“test1”文件夹,右键选择“使用其它程序打开”,选择使用VScode打开)
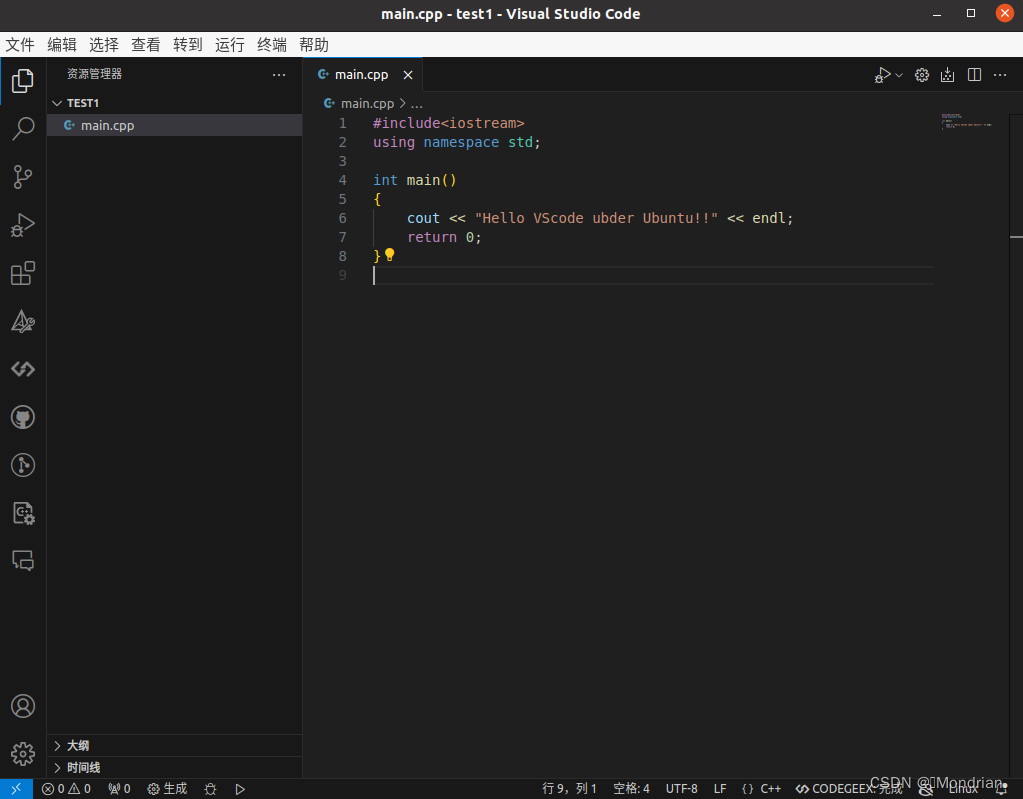
(2)创建一个main.cpp
(3)编写测试代码
#include<iostream>
using namespace std;
int main()
{
cout << "Hello VScode ubder Ubuntu!!" << endl;
return 0;
}
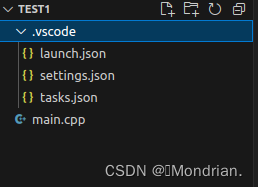
(4)配置.vscode里的相关.json文件,可以选择右键新建名为“.vscode”的文件夹,然后手动创建以下三个.json文件
launch.json:
{
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) Launch",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/${fileBasenameNoExtension}.out",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": true,
"MIMode": "gdb",
"preLaunchTask": "build",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
]
}settings.json:
{
"files.associations": {
"ostream": "cpp",
"iostream": "cpp",
"array": "cpp",
"atomic": "cpp",
"bit": "cpp",
"*.tcc": "cpp",
"cctype": "cpp",
"clocale": "cpp",
"cmath": "cpp",
"compare": "cpp",
"concepts": "cpp",
"cstdarg": "cpp",
"cstddef": "cpp",
"cstdint": "cpp",
"cstdio": "cpp",
"cstdlib": "cpp",
"cwchar": "cpp",
"cwctype": "cpp",
"deque": "cpp",
"string": "cpp",
"unordered_map": "cpp",
"vector": "cpp",
"exception": "cpp",
"algorithm": "cpp",
"functional": "cpp",
"iterator": "cpp",
"memory": "cpp",
"memory_resource": "cpp",
"numeric": "cpp",
"random": "cpp",
"string_view": "cpp",
"system_error": "cpp",
"tuple": "cpp",
"type_traits": "cpp",
"utility": "cpp",
"initializer_list": "cpp",
"iosfwd": "cpp",
"istream": "cpp",
"limits": "cpp",
"new": "cpp",
"numbers": "cpp",
"stdexcept": "cpp",
"streambuf": "cpp",
"typeinfo": "cpp"
}
}tasks.json:
{
"version": "2.0.0",
"tasks": [
{
"label": "build",
"type": "shell",
"command": "g++",
"args": ["-g", "${file}", "-std=c++11", "-o", "${fileBasenameNoExtension}.out"]
}
]
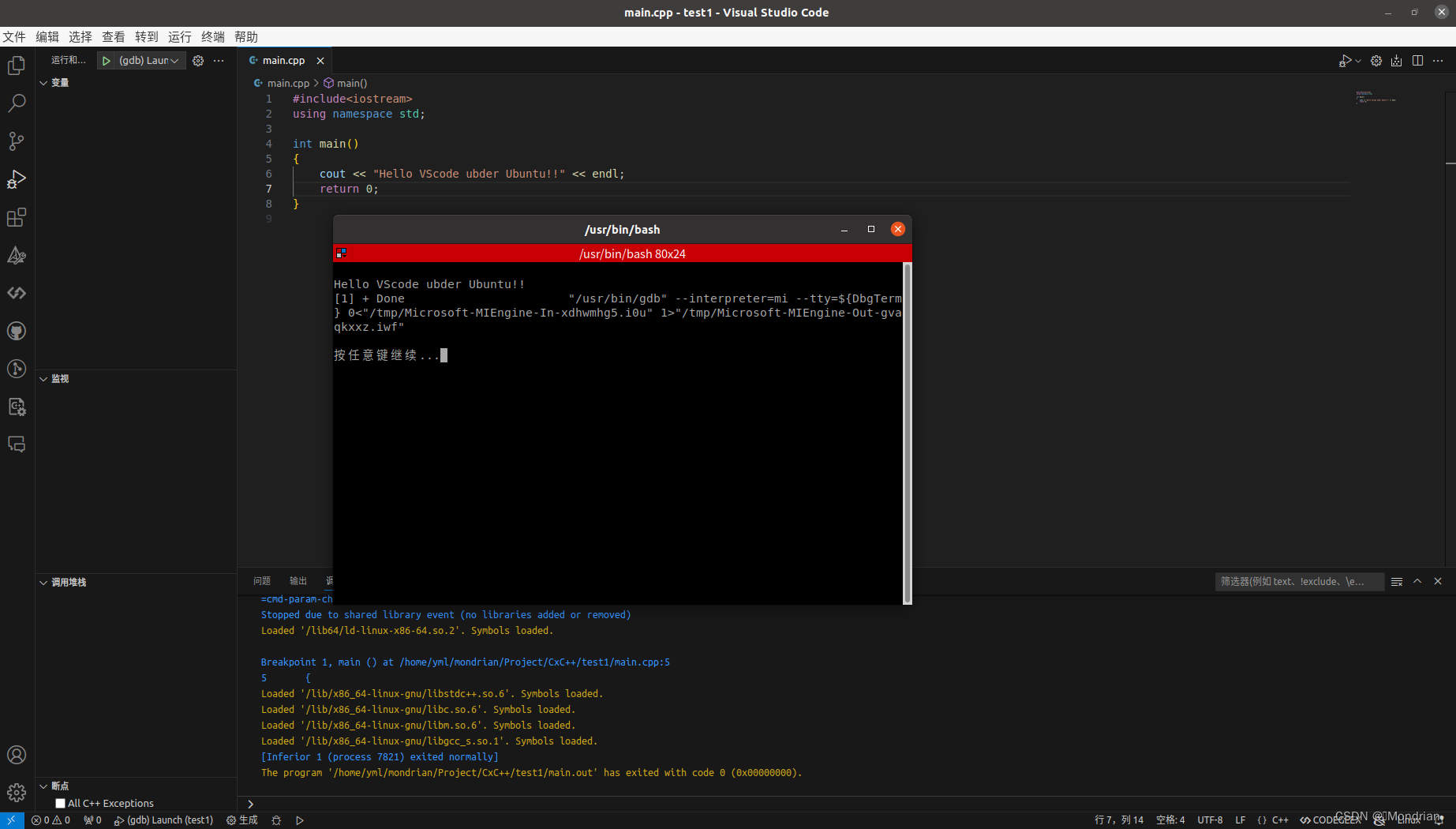
}(5)回到main.cpp,按下F5进行编译运行(实际上是调试,如果打了断点的话会停在断点)
四、安装、配置arm-none-eabi-gcc交叉编译工具链
关于交叉编译工具链的下载,有很多种方法,可以前往官网下载
(推荐)或者直接使用我上传在天翼云盘的资源(因为百度网盘没有会员的话下载会非常慢)访问码:pgn6
arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi编译工具链下载![]() http://xn--gzu811i//pan.baidu.com/s/17r_5awLRDtE-ehpPEQuJ2w?pwd=m9vi%20%E6%8F%90%E5%8F%96%E7%A0%81:%20m9vi%20%E5%A4%8D%E5%88%B6%E8%BF%99%E6%AE%B5%E5%86%85%E5%AE%B9%E5%90%8E%E6%89%93%E5%BC%80%E7%99%BE%E5%BA%A6%E7%BD%91%E7%9B%98%E6%89%8B%E6%9C%BAApp%EF%BC%8C%E6%93%8D%E4%BD%9C%E6%9B%B4%E6%96%B9%E4%BE%BF%E5%93%A6下载结束后,打开所在文件夹终端(建议将该压缩包转移到一个不常更改的文件夹里,可以新建),输入以下命令进行解压:
http://xn--gzu811i//pan.baidu.com/s/17r_5awLRDtE-ehpPEQuJ2w?pwd=m9vi%20%E6%8F%90%E5%8F%96%E7%A0%81:%20m9vi%20%E5%A4%8D%E5%88%B6%E8%BF%99%E6%AE%B5%E5%86%85%E5%AE%B9%E5%90%8E%E6%89%93%E5%BC%80%E7%99%BE%E5%BA%A6%E7%BD%91%E7%9B%98%E6%89%8B%E6%9C%BAApp%EF%BC%8C%E6%93%8D%E4%BD%9C%E6%9B%B4%E6%96%B9%E4%BE%BF%E5%93%A6下载结束后,打开所在文件夹终端(建议将该压缩包转移到一个不常更改的文件夹里,可以新建),输入以下命令进行解压:
tar -xvf arm-gnu-toolchain-13.2.rel1-x86_64-arm-none-eabi.tar.xz解压后得到一个同名文件夹

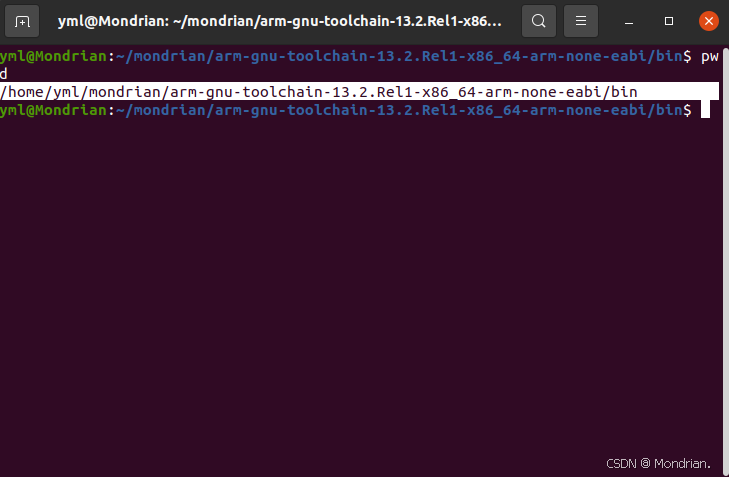
复制可执行文件“bin”的路径,操作如下:
(1)进入“arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi”文件夹
(2)进入“bin”文件夹
(3)在空白处右键,选择“在终端打开”
(4)输入以下指令查看路径
pwd如图白色部分所示就是bin文件的路径,选择后按住“Shift”+“Ctrl”+“c”进行复制
打开终端,输入下面的指令,打开profile文件(不加sudo的话只能以“只读”打开)
sudo vim /etc/profile在打开的文件末尾输入以下内容(注:$PATH:后面的链接为我们刚复制的bin的链接,配置时需要根据实际情况进行修改)
步骤:
(1)输入“i”进入插入模式
(2)将光标移动到末行后,回车另起一行
(3)输入前面的export PATH=$PATH:
(4)按住“Shift”+“Ctrl”+“v”进行粘贴
(5)按下Esc,然后按下“Shift”+“:”,输入“wq”,保存修改并退出
export PATH=$PATH:/home/yml/mondrian/arm-gnu-toolchain-13.2.Rel1-x86_64-arm-none-eabi/bin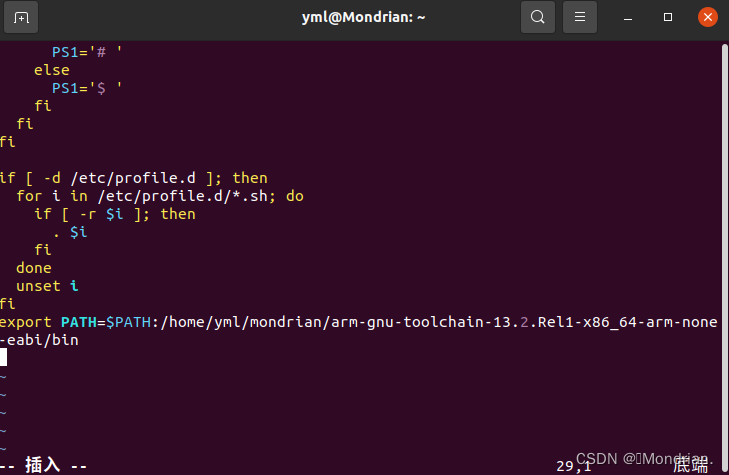
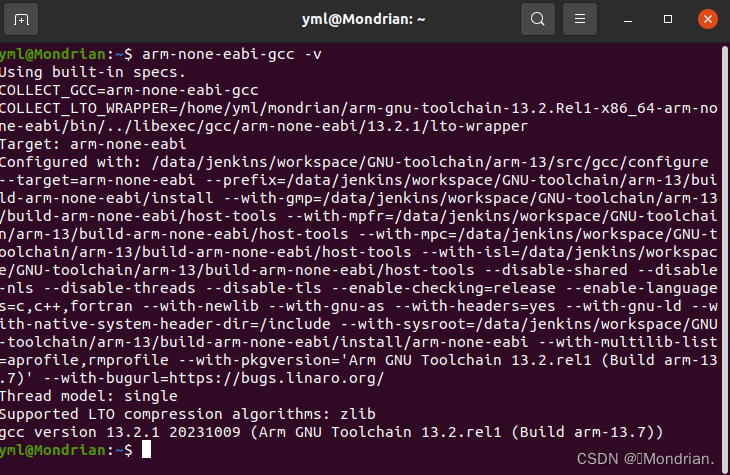
执行如下命令,然后重启电脑/虚拟机使环境变量生效
source profile重启完成后执行以下命令看是否配置成功
五、安装JLink驱动
1、安装libreadline库
我们烧录会用到JLinkExe的命令,而JLinkExe会用到libreadline库,所以要安装libreadline库,执行如下命令安装:
sudo apt-get install libreadline-dev2、进入SEGGER的官网,下载JLink驱动(选择Linux下的64-bit DEB Installer)
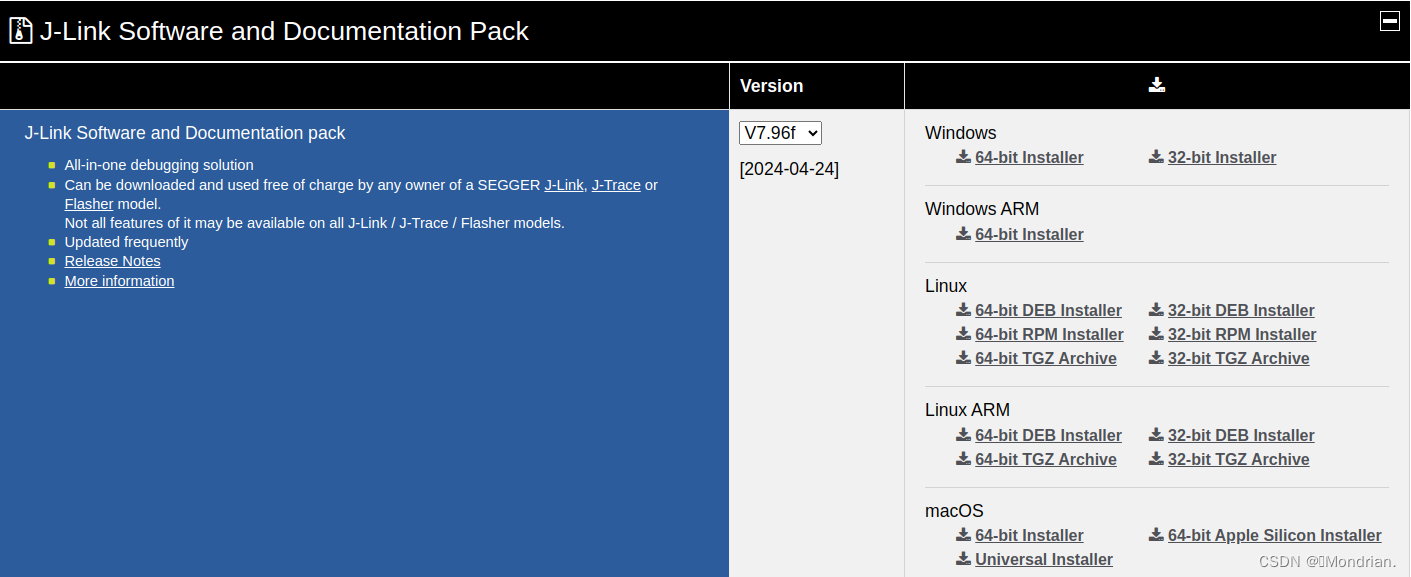
点击Download
左下角勾选同意,然后“Download software”
速度应该会特别慢,这里可以选择我上传到云盘的资源(v792o版本):
天翼云盘(访问码b4oi):
JLink驱动![]() https://pan.baidu.com/s/1DZm-yv6eYUxakmD4R5_kBA?pwd=k365
https://pan.baidu.com/s/1DZm-yv6eYUxakmD4R5_kBA?pwd=k365
3、安装JLink驱动
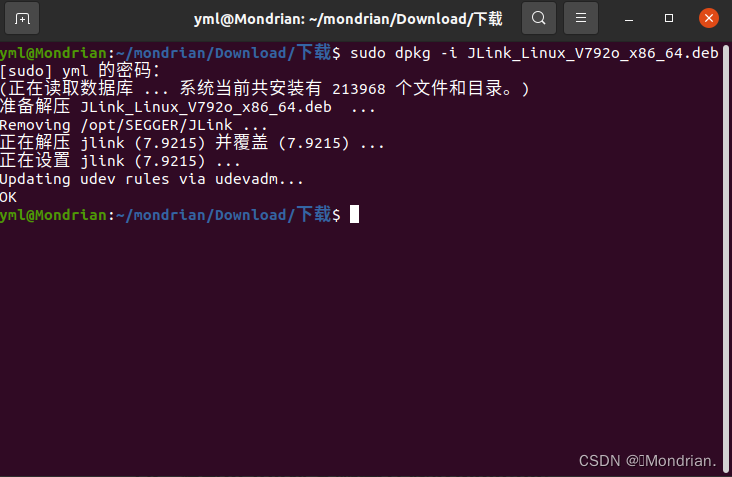
下载好后,打开.deb文件所在的文件夹,打开终端,执行以下命令进行安装:
sudo dpkg -i JLink_Linux_V792o_x86_64.deb因为我之前已经安装过了,所以这里显示“覆盖”
4、查看JLink版本
执行如下命令来查看Jlink版本,验证是否安装成功
jlink --version![]()
5、进入SEGGER查看相关可执行文件
输入以下命令,然后执行“ls”查看相关的可执行文件(一般默认安装位置都是在/opt下的)
cd /opt/SEGGER/JLink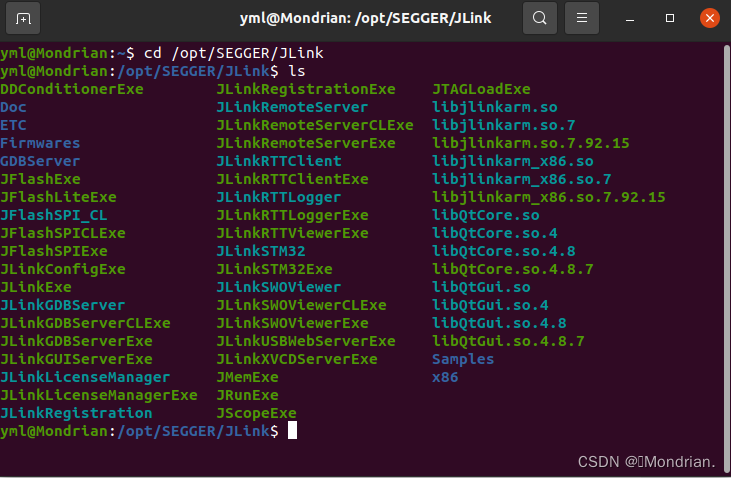
六、J-Link Commander交互模式初体验
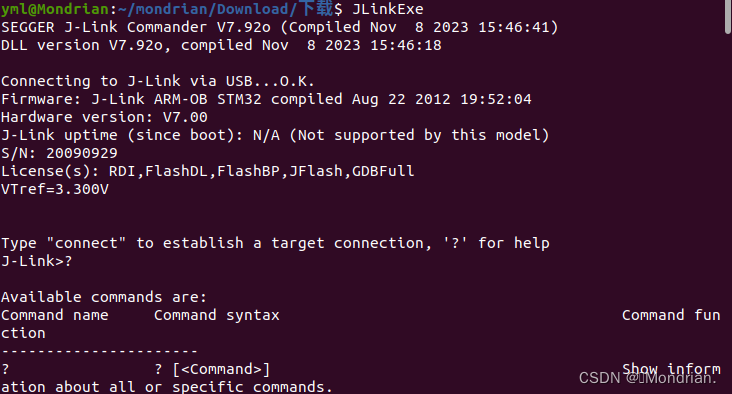
1、直接执行JLinkExe命令
主要是为了验证一下是否安装成功,执行以下命令,进入J-Link Commander交互模式
JLinkExe此时如果没有链接Jlink的话会出现这个界面:
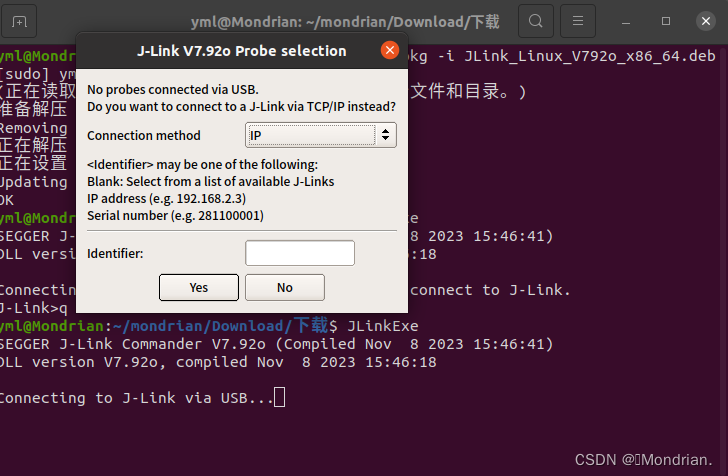
我们点击No,然后会进入Commander交互模式,在这种模式下,我们可以执行各种 J-Link Commander 提供的命令来连接、配置调试器,下载程序或文件到目标设备等操作,感兴趣的同学可自行学习。
执行“q”指令退出该模式。

2、初次尝试使用JLinkExe来与设备建立连接
连接A板(XH2.54转MX1.25的转接线需要自己焊接,注意查看手册,对上线序)
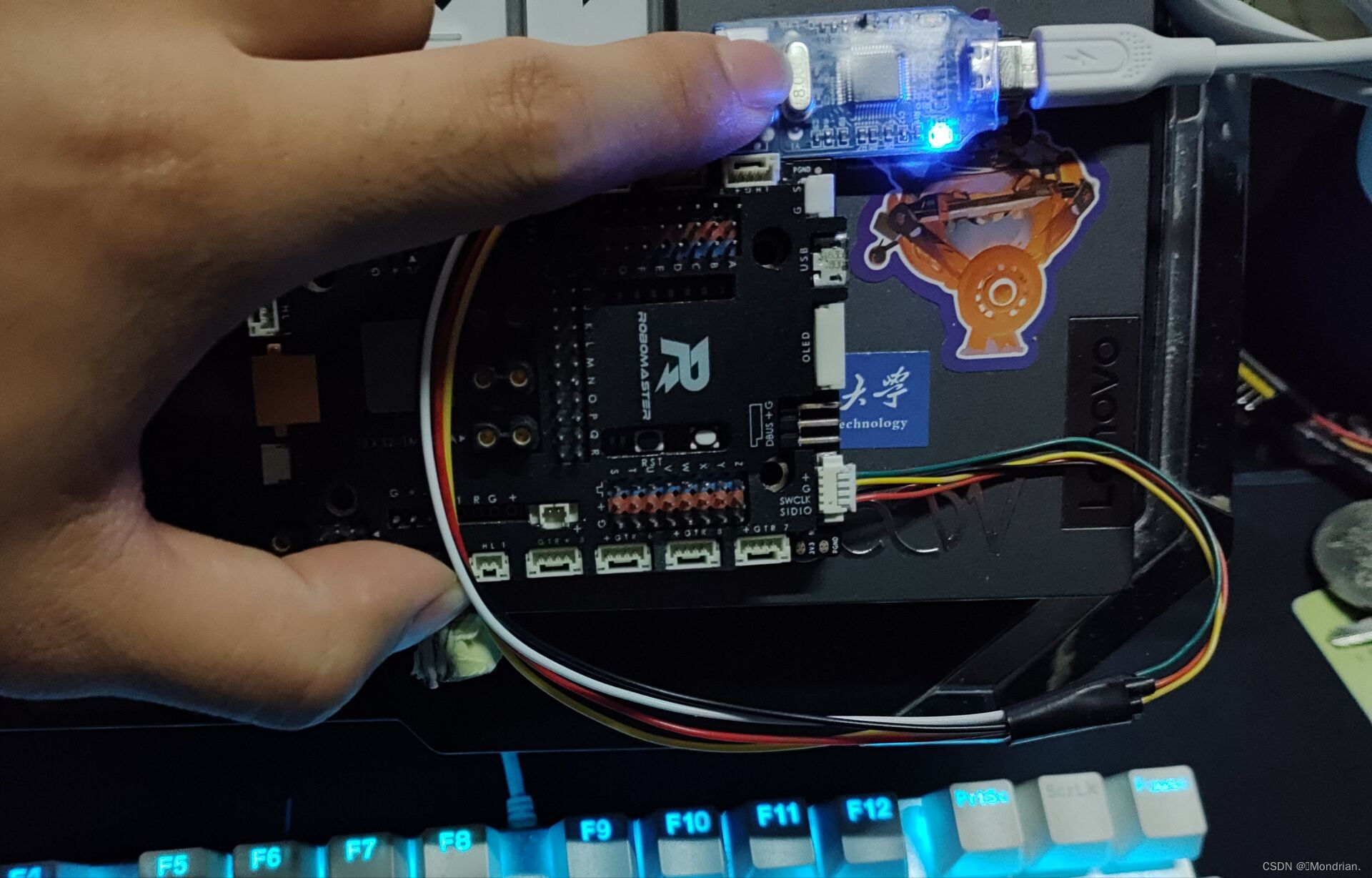
当然,如果我们接入Jlink设备后,再执行这个命令会提示你执行“connect”来与设备进行链接,或者输入“?”来查看更多的指令帮助。
我们输入“connect”后,会返回我们连接的开发板芯片的信息,并让我们确认。
我们输入芯片型号来设置Device(这里以STM32F427IIH6为例)

选择连接接口为SWD(或JTAG,根据实际需求来看)

选择传输速度,默认4000kHz,我们可以自行修改,比如我这里设置2000kHz
![]()
按下回车后,等待几毫秒便会提示连接成功了(会打印检测到的芯片以及寄存器信息等,例如我们可以找到熟悉的“Cortex-M4”)
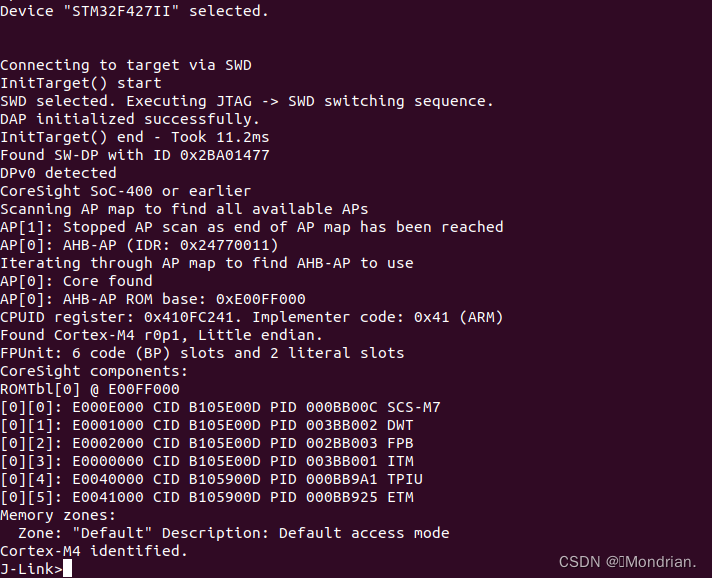
假设这里我们已经编译得到了一个test.bin或test.hex文件,那么到这一步后,我们就可以使用下面两条命令来实现烧录.bin文件或.hex文件了(这里不做演示,只做说明)
loadbin ./test.bin,0x08000000loadfile ./test.hex然后执行“q”退出Commander模式。
七、安装CubeMX
1、安装Java环境
打开终端,输入下面的指令安装Java运行环境
sudo apt install default-jre安装完成后,输入下面的指令验证是否安装成功
java --version
2、安装CubeMX
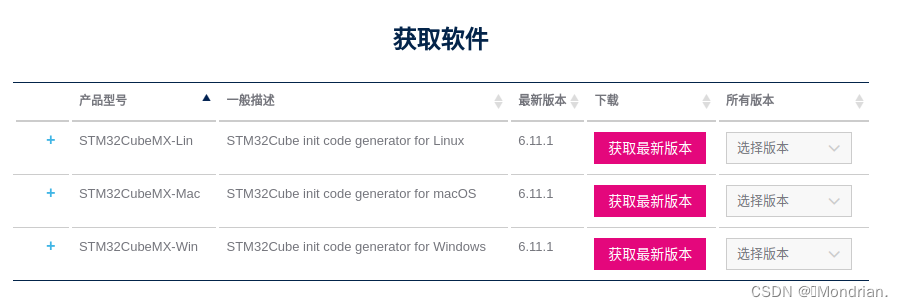
前往官网下载CubeMX软件包(点击获取软件)
STM32CubeMX软件下载![]() https://www.st.com/zh/development-tools/stm32cubemx.html#overview
https://www.st.com/zh/development-tools/stm32cubemx.html#overview
选择第一个下载(Linux版本)
之后会弹出一个许可协议,我们选择同意后,会弹出选择下载身份的界面,可以右下角选择访客下载,也可以注册一个ST账号后再登录下载,这里建议注册一个账号后再下载
(注:无论是选择访客下载还是注册后下载,软件的下载链接都会发送到你填写的邮箱里,所以请确保你的邮箱是在电脑上打开的)

将下载好的包解压后,进入,双击运行“SetupSTM32CubeMX-6.11.1”(以实际下载的版本为主)

然后根据向导一步步进行安装,注意选择一个能容得下的盘
安装完成后,打开刚刚选择的安装位置(例如我这里是/home/yml/STM32CubMX),双击“STM32CubeMX”启动程序
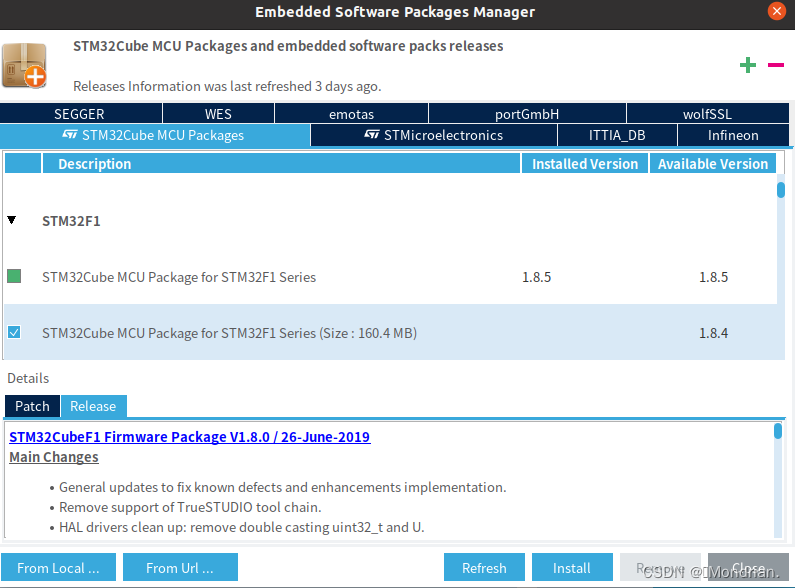
登录之后,点击右边栏的"INSTALL/REMOVE"或“Help”->“Manage embedded sofeware packages”
选择自己需要的芯片型号的HAL库包,选好之后点击“INSTALL”,想移除某软件包也可以在这个界面选择,然后点“REMOVE”
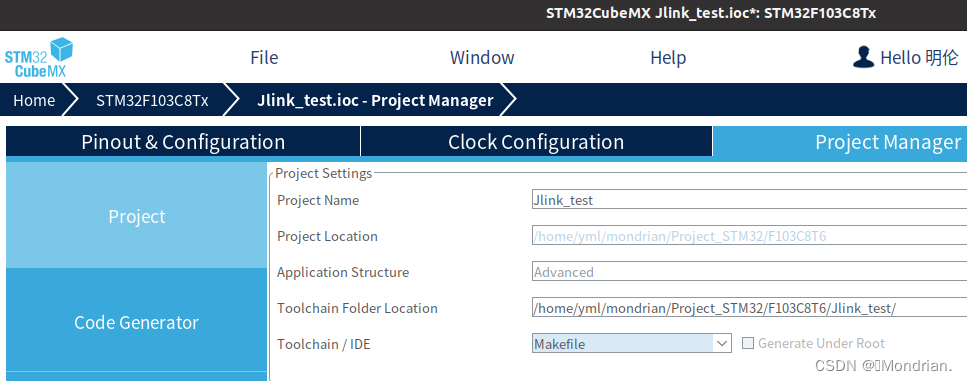
(关于工程的创建过程,可以自行搜索学习,这里就不赘述了,只需注意一点:Project Maneger那里的Toolchain/IDE要选择Makefile)
八、编写JLink烧录脚本并修改Makefile
1、打开工程
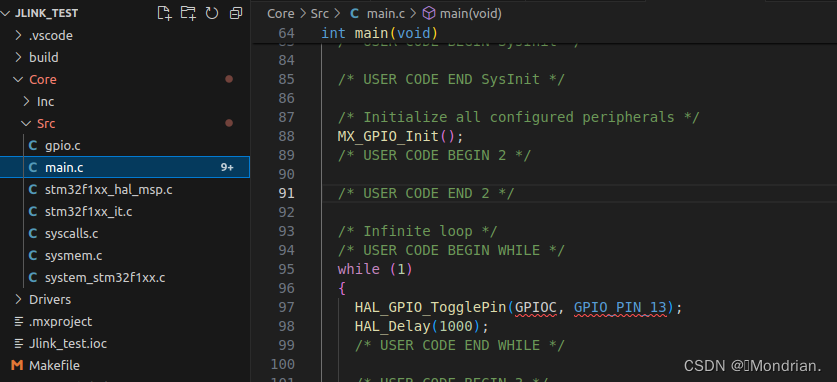
使用VScode打开一个新建好的工程
2、编写代码
打开main.c,随便写点什么,比如这里来个经典点灯
3、编译
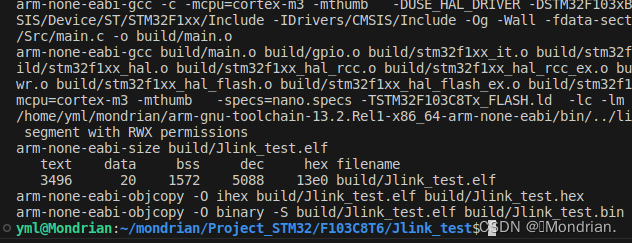
在底部的终端栏里执行以下指令进行编译("-j16"这里的16对应电脑核心数,我的是16核的,所以是-j16,根据电脑实际硬件配置进行修改,例如CPU是20核的就改为-j20)
make -j16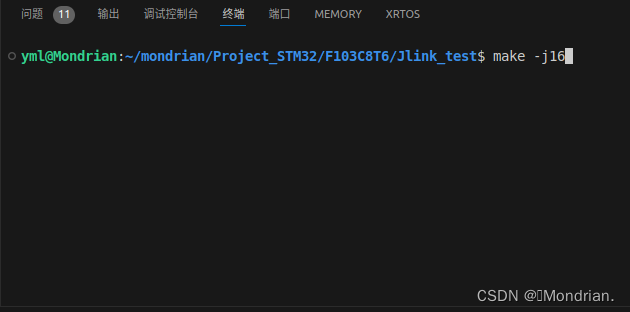
执行后可以看到编译好的.elf、.hex、.bin文件
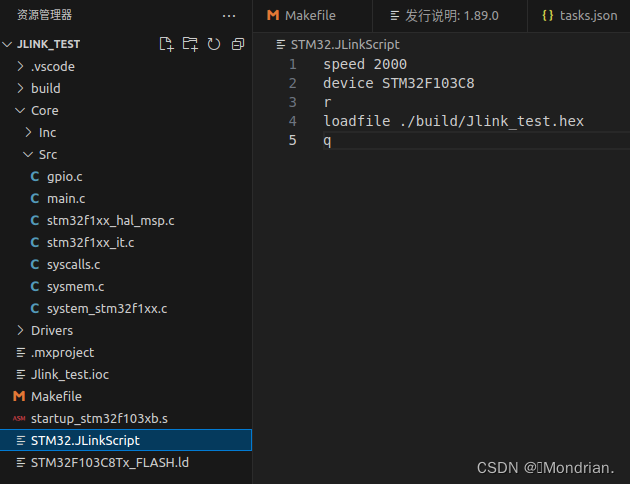
4、编写JLinkScript脚本
在工程主目录下创建一个.JLinkScript脚本文件,并编写以下内容
speed 2000
device STM32F103C8
r
loadfile ./build/Jlink_test.hex
q解释:
speed 2000: 设置J-Link与目标设备之间的通信速度为2000 kHz(这个速率可自行修改)。
device STM32F103C8: 指定目标通信设备的型号为STM32F103C8,如果是其他芯片需要修改为对应的型号。
r: 通过DEMCR.VC_CORERESET来在复位后暂停核心的执行。在ARM Cortex-M系列微控制器中,DEMCR是一个调试与监控寄存器,而VC_CORERESET是其中的一个位(bit)。将这个位设置为1会导致在复位后暂停核心的执行。
loadfile ./build/Jlink_test.hex: 加载指定的hex文件(位于"./build/Jlink_test.hex"路径下)到目标设备的Flash存储器中。(注:这里的Jlink_test.hex是上一步“编译”后得到的,工程名称不一样,所得到的.hex文件名也不一样,需要根据实际情况进行修改)。
q: 退出J-Link调试工具,一次烧录结束。
修改(只是举例,可跳过不看):
如果想要修改生成的.elf、.hex、.bin文件名,可以打开Makefile文件,在Target这里进行修改(例如,把Jlink_test修改为test1后,再次编译就会生成test1.elf、test1.hex、test1.bin)
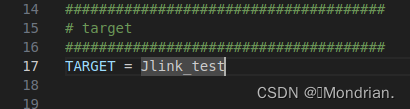

注:修改名称后,记得将STM32.JLinkScript里的.hex文件名也修改了。
5、修改Makeflie
打开Makefile后,滑动至最底下,添加下面这条命令
Flash:
JLinkExe -if SWD -CommanderScript STM32.JLinkScript解释:调用JLinkExe(J-Link调试工具),选择SWD接口(当然你也可以设置为JTAG)与目标设备进行通信,然后执行名为"STM32.JLinkScript"的J-Link脚本文件。
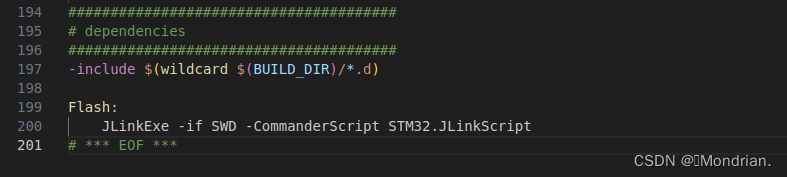
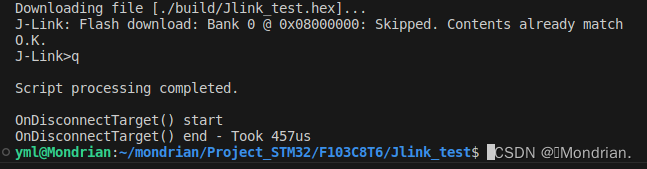
到这一步后,你就可以使用“make”指令来进行编译,然后插上开发板,使用“make Flash”指令来进行烧录了。
make Flash部分烧录日志的截图:

6、创建烧录task
配置.vscode里的相关.json文件,可以选择右键新建名为“.vscode”的文件夹,然后手动创建“tasks.json”文件,添加下面的内容:
{
"version": "2.0.0",
"tasks": [
{
"label": "jlink_Flash",
"type": "shell",
"command":"make Flash",
"group": {
"kind": "build",
"isDefault": false,
}
}
]
}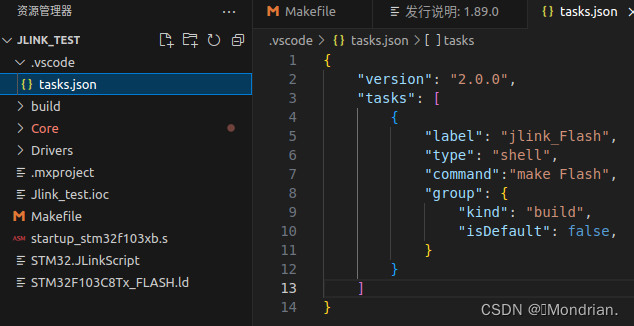
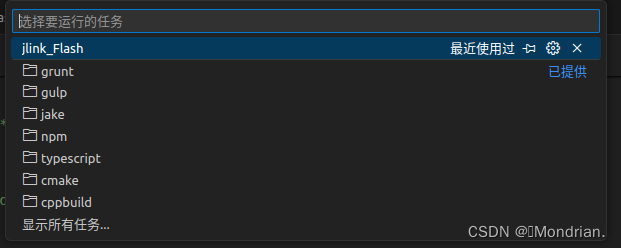
保存之后,就可以点击“终端->运行任务->jlink_Flash”来进行烧录操作了

当然,也可以配置的更加方便一点,比如使用快捷键“F5”实现一键烧录下载,可以自行去尝试。
九、安装Ozone
Ozone是一款功能强大的调试和系统分析工具,也是SEGGER开发的,支持多种微处理器架构和调试接口,并与SEGGER的J-Link调试器兼容。
1、下载Ozone的软件包
进去之后等一等,网页加载完成后会下滑到“ Ozone - The J-Link Debugger”这一栏,在“Linux”那一栏选择下载“64-bit DEB Installer”
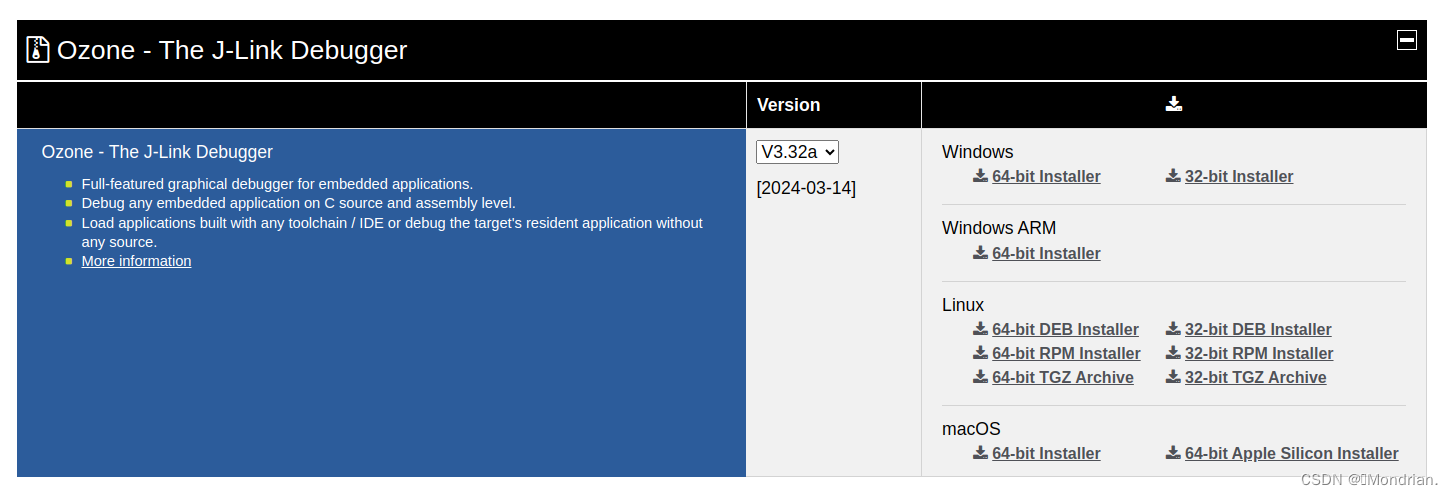
同意SEGGER的软件安装协议(忘记的可以回看第五节里安装JLink驱动那块的流程),然后就开始下载了

老样子,官网下载比较慢,我在云盘也上传了相关软件包(V326版本),需要的可以下载
天翼云盘(提取码:tv8u):
Ozone_Linux_V326![]() https://pan.baidu.com/s/1Lq2iSv_zSqz_0Q9vOcYNRA?pwd=np6y
https://pan.baidu.com/s/1Lq2iSv_zSqz_0Q9vOcYNRA?pwd=np6y
2、安装Ozone
打开包含软件包的文件夹
从这里打开终端,执行以下命令进行安装(注:这里的软件包版本要修改为自己实际下载的)
sudo dpkg -i Ozone_Linux_V326_x86_64.deb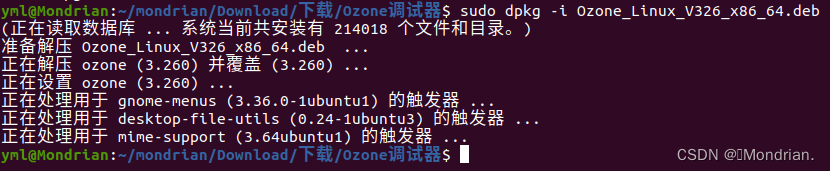
十、Ozone的配置及初次体验
1、基础调试配置
打开终端,执行下面的命令,打开Ozone
ozone
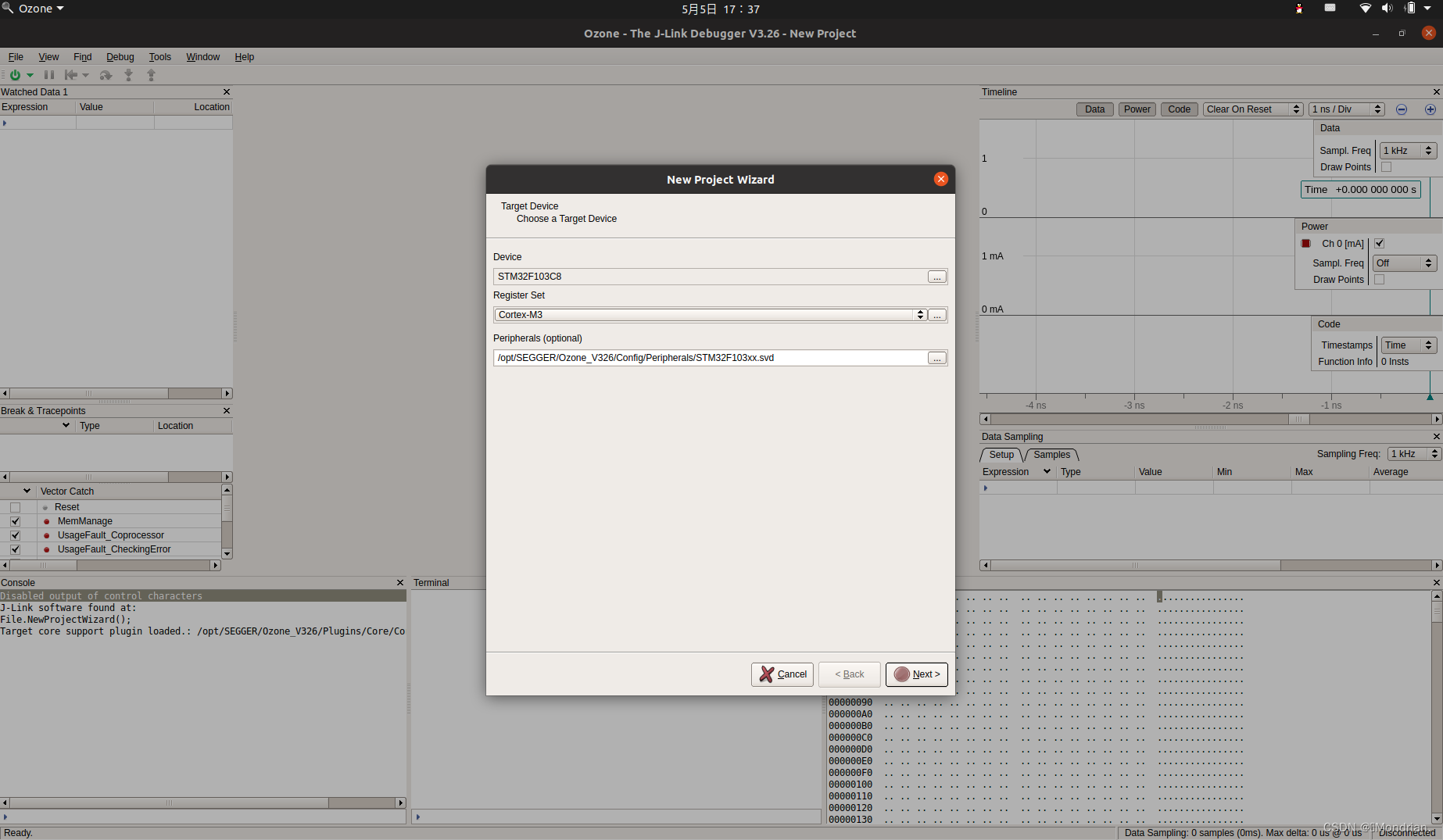
在弹出的小框中,配置Device为自己开发板的芯片型号(首次打开应该是不会显示的,需要手动搜索,我这里显示C8是因为之前配置过)
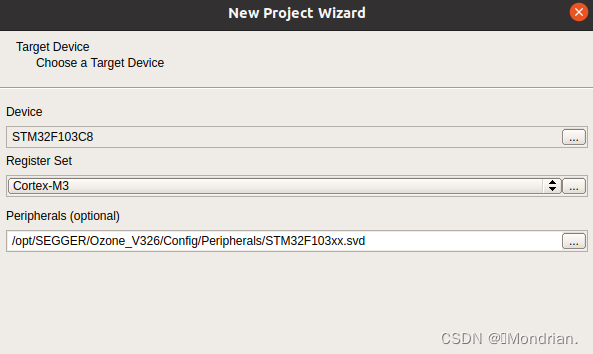
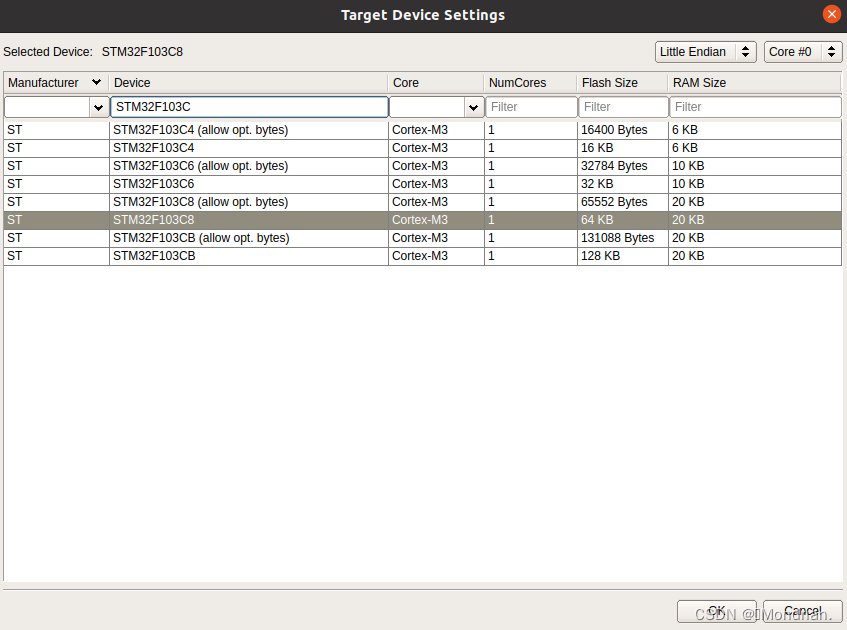
选择好芯片型号后,Register Set会自动设置好,我们需要设置的是Peripherals,选择对应芯片的.svd文件
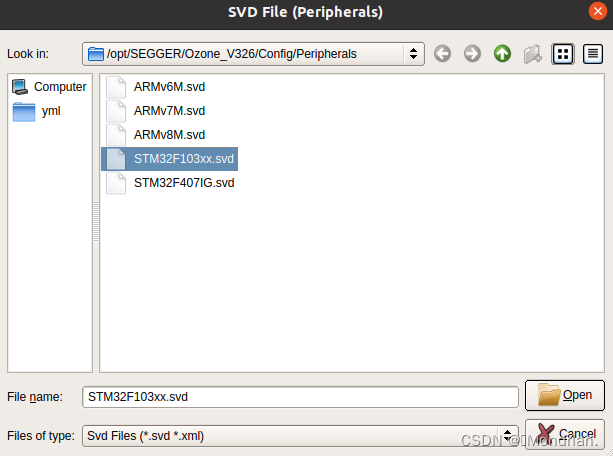
(插曲).svd文件的寻找
这个文件可以在ST的官网下载到,流程如下:
进入官网,在搜索栏里搜索想要寻找的芯片型号
ST意法半导体官网![]() https://www.st.com/content/st_com/zh.html
https://www.st.com/content/st_com/zh.html
点击搜索出来的芯片,进去后点击“CAD资源”这一栏

在全部资源里可以找到SVD(System View Description)文件包
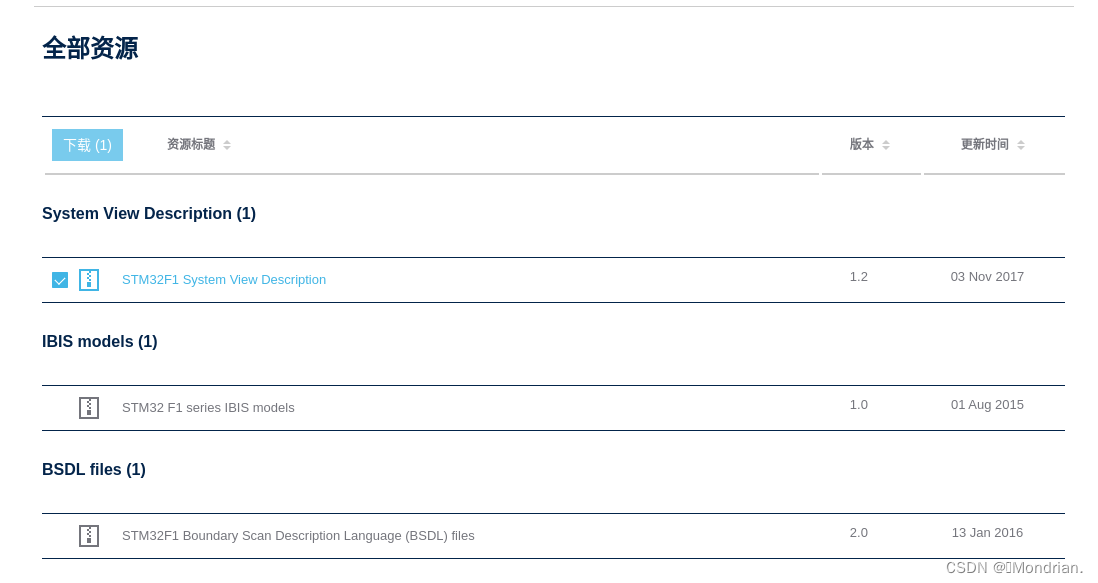
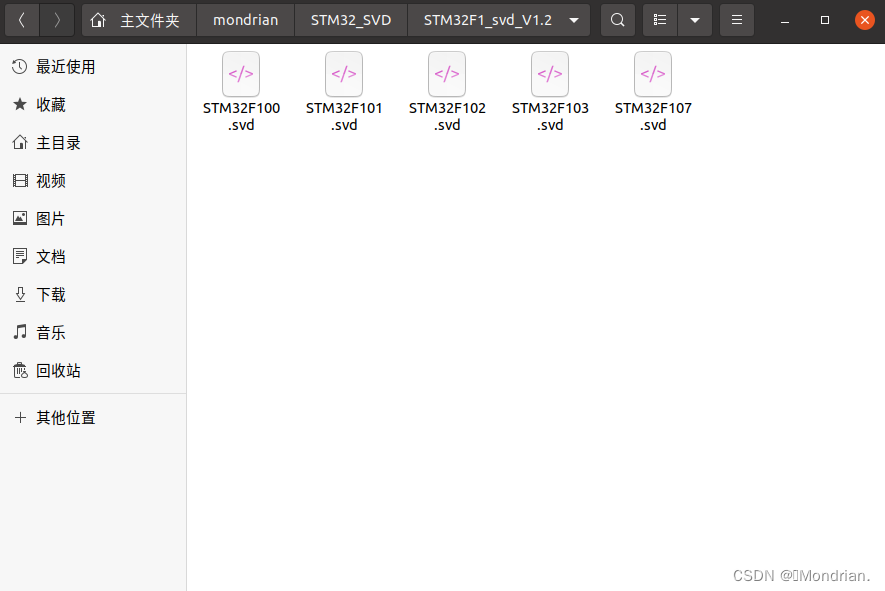
下载解压后就可以得到这一系列的各种型号的.svd文件了
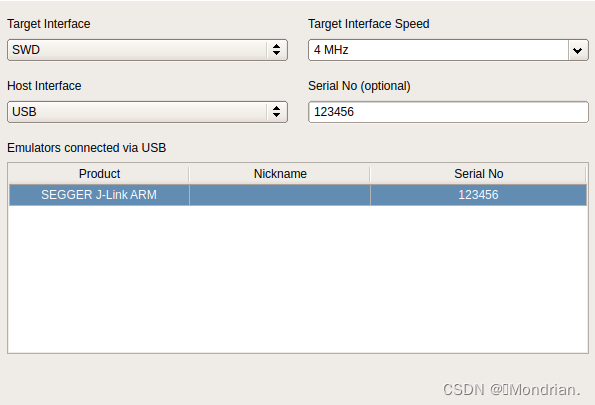
选择好.svd文件后,点击右下角的“Next”,在这个界面,我们需要选择“Target Interface”为“SWD”,点击识别到的JLink设备,然后点“Next”。
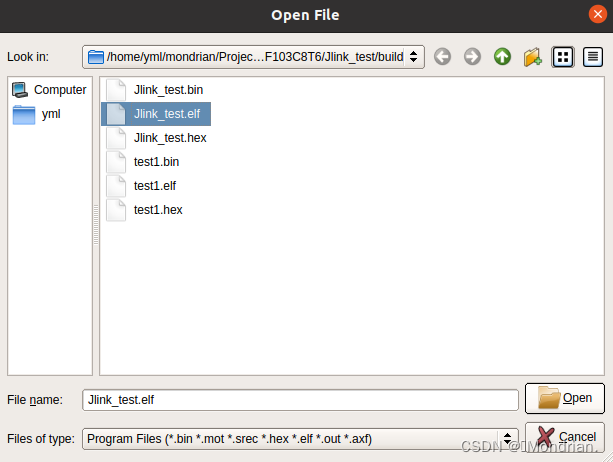
在这一步需要选择.elf文件,这是由Makefile生成的(第八节的第3小节里提到过)。这个文件通常在我们的工程文件的build目录下。
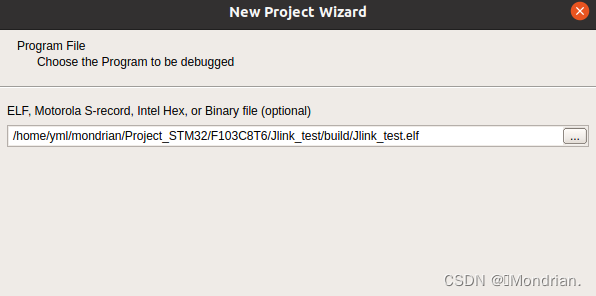
点击“Open”进行选择,选择好后我们点击“Next”进行下一步配置。
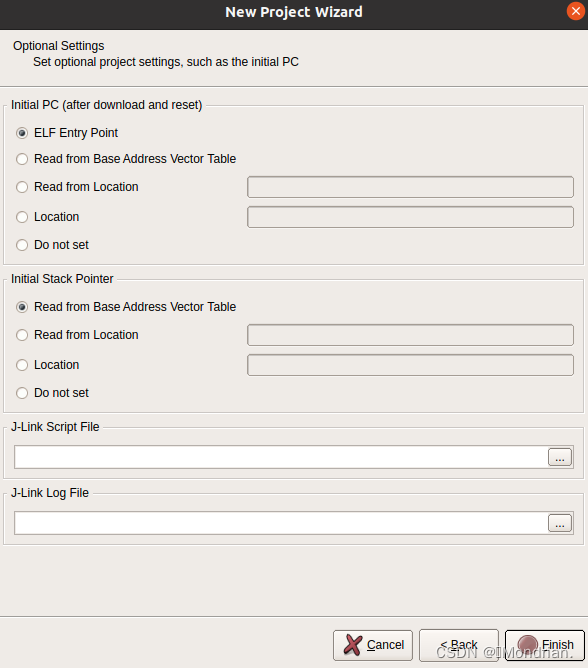
这一步我们保持默认就好,点击“Finish”
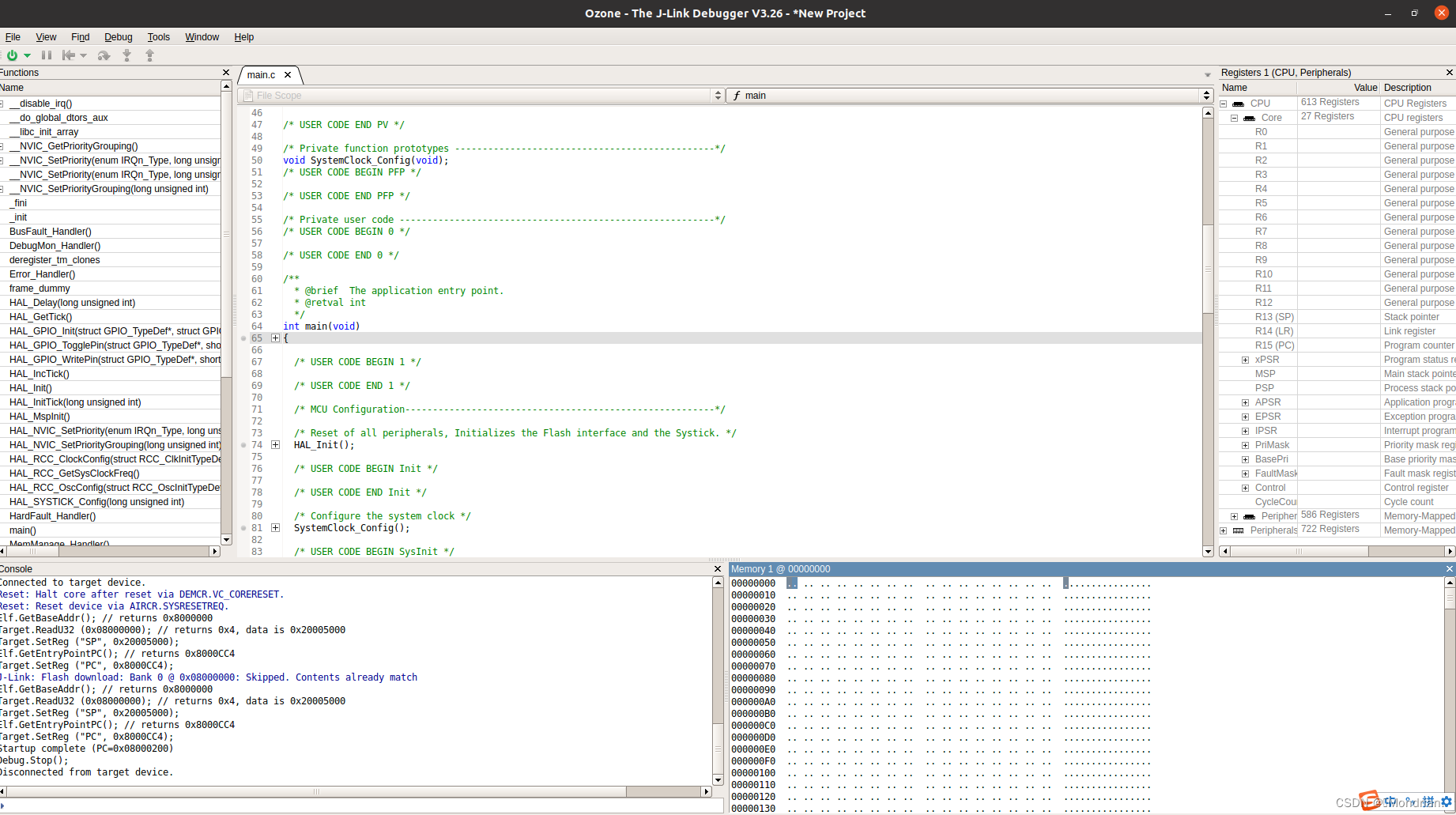
下面这个界面就是配置完成后的界面了,我们可以点击左上角的绿色按钮开始启动调试
2、常用调试配置
Ozone中提供了非常多的控件,在这里介绍两个调参常用的,其它控件的功能大家可以自行探索
(1)Watched Data
单击左上角的“View”,在“General”一栏找到“Watched Data”,选择“New Watched Data Window”,就会生成一个下图所示的小窗口,我们可以在这个窗口里查看变量的值。
例如:我们定义一个静态全局变量Test_Data,然后把它添加进来,看看它的值
注:watch里的变量不会实时更新,只有在暂停或遇到断点的时候才会更新,如果想让它自动刷新的话,可以右键变量名->将“Refresh Rate”设置为“5Hz”(一秒刷新5次),或者添加到Graph里实时更新(刷新率更高)
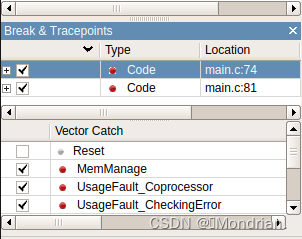
(2)Break&Tracepoints
单击左上角的“View”,在“General”一栏找到“Break&Tracepoints”,单击后就会生成一个下图所示的小窗口,我们可以在这个窗口里查看和管理设置的断点。
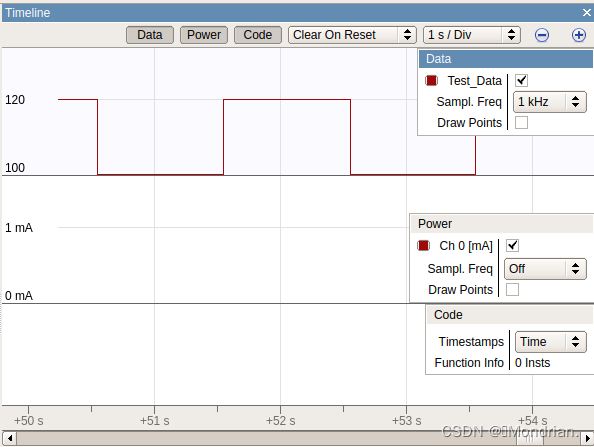
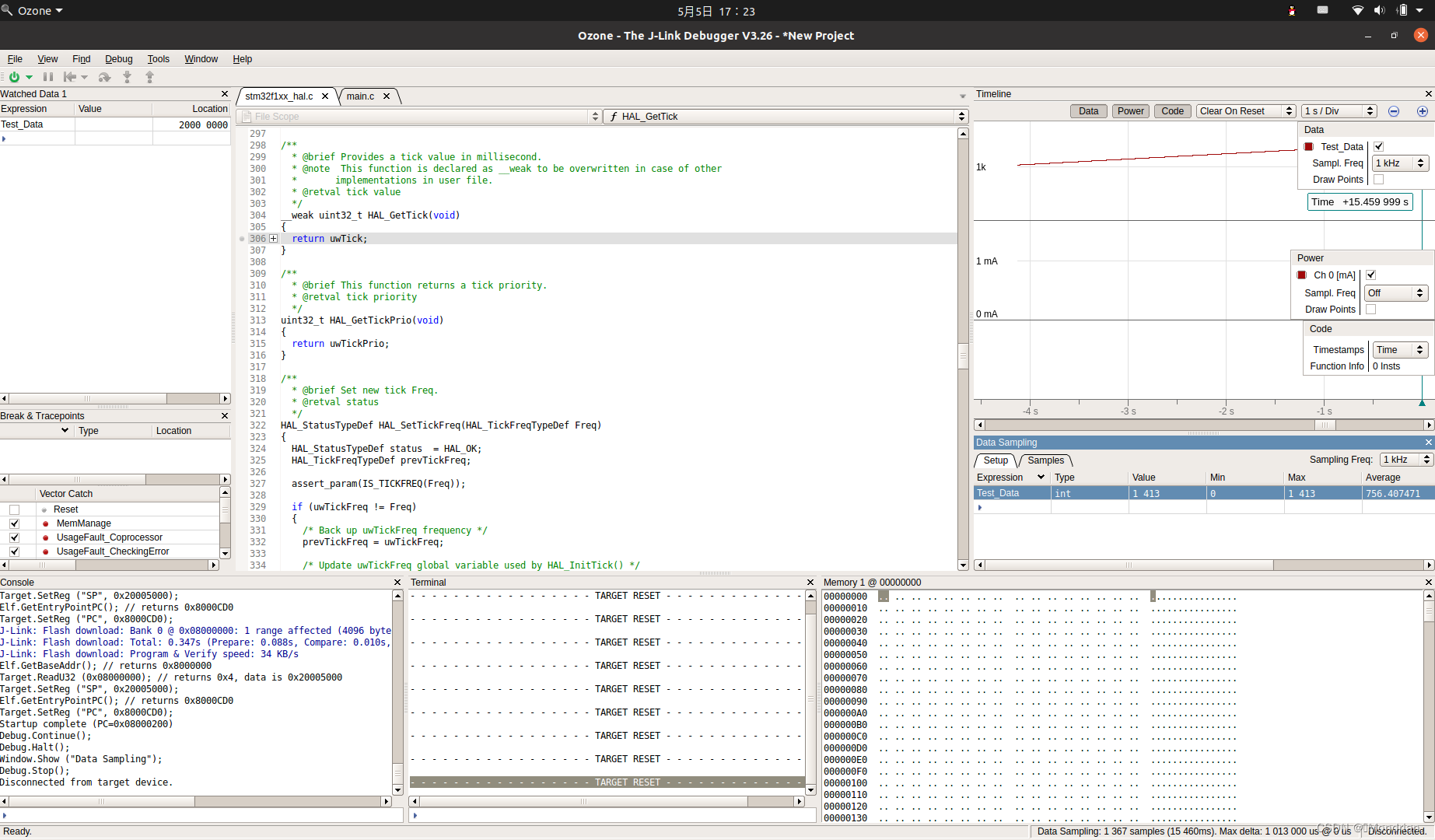
(3)Timeline
单击左上角的“View”,在“Advanced”一栏找到“Timeline”,单击后就会生成一个下图所示的小窗口,我们可以在这个窗口里查看变量随时间的变化过程,并且可以自行设置采样频率(PID调参神器)。
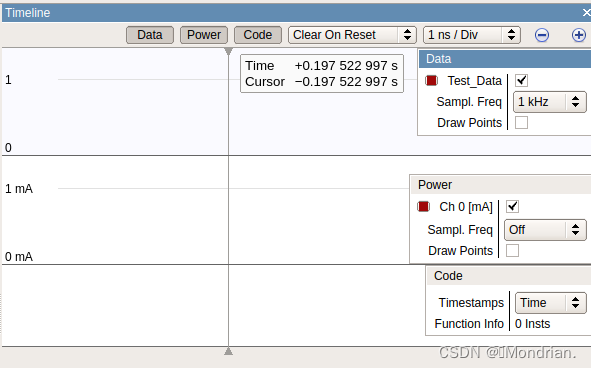
我们可以简单写一个小例子看看效果:
HAL_Delay(1000);
Test_Data = Test_Data + 20;
HAL_Delay(1000);
Test_Data = Test_Data - 20;将Watchd Data窗口里的“Test_Data”右键,选择“Graph”后,就能在“Timeline”窗口看见它的变化了,我们将时间滚动设置的慢一点(比如设置为1秒钟),就能看到“Test_Data”的可视化变化情况了。
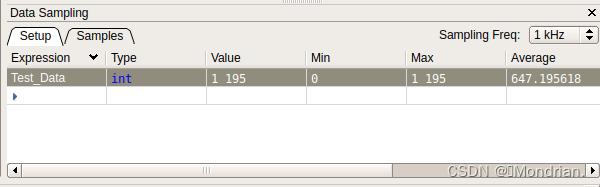
(4)Data Sampling
单击左上角的“View”,在“Advanced”一栏找到“Data Sampling”,单击后就会生成一个下图所示的小窗口。这也是一个类似于“Watched Data”的变量监视窗口,它的优点在于可以自行设置更高的采样频率,例如这里设置了采样频率为1kHz。
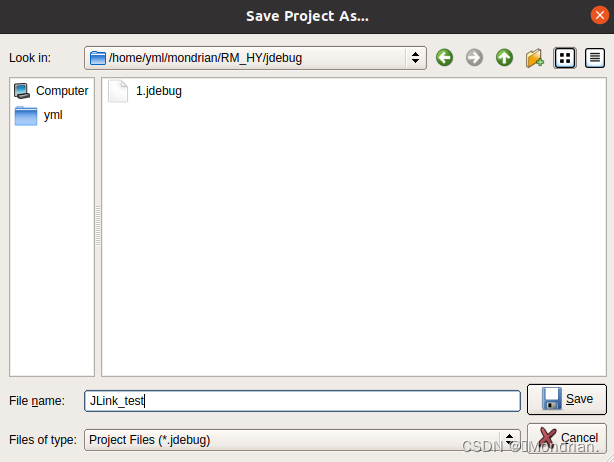
3、调试文件的保存
完成一次调试后,可以将这次调试的文件保存起来,下次再打开的时候,就可以紧接着上次调试的工程继续调试了(就不用每次都繁琐的添加变量设置采样时间了)
点击左上角的“File”,然后点击“Save Project as...”,此时会弹出一个会话框,让你选择调试工程保存的位置以及名称。(建议单独创建一个文件夹用来保存调试文件,文件夹命名最好加上芯片名称用以区分,找起来也方便找)
当你没有保存的时候,点击右上角的红色“X”退出时也会提示你让你进行保存的。
4、调试文件的加载
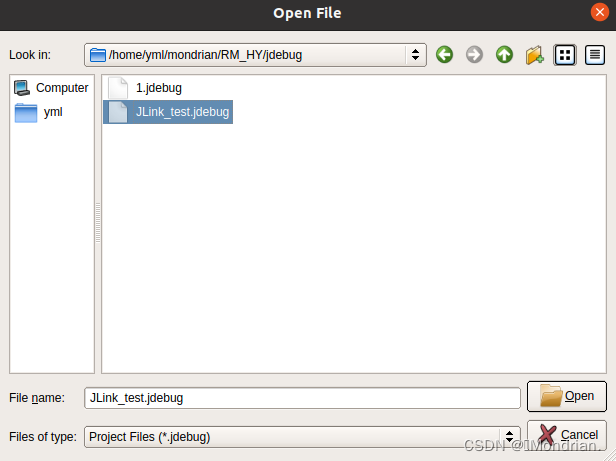
再次启动Ozone时,会弹出小对话框让你选择,我们点击“Open Existing Project”后就会弹出一个对话框,选择上次保存的“.jdebug”文件打开,就能恢复上次调试时的场景。
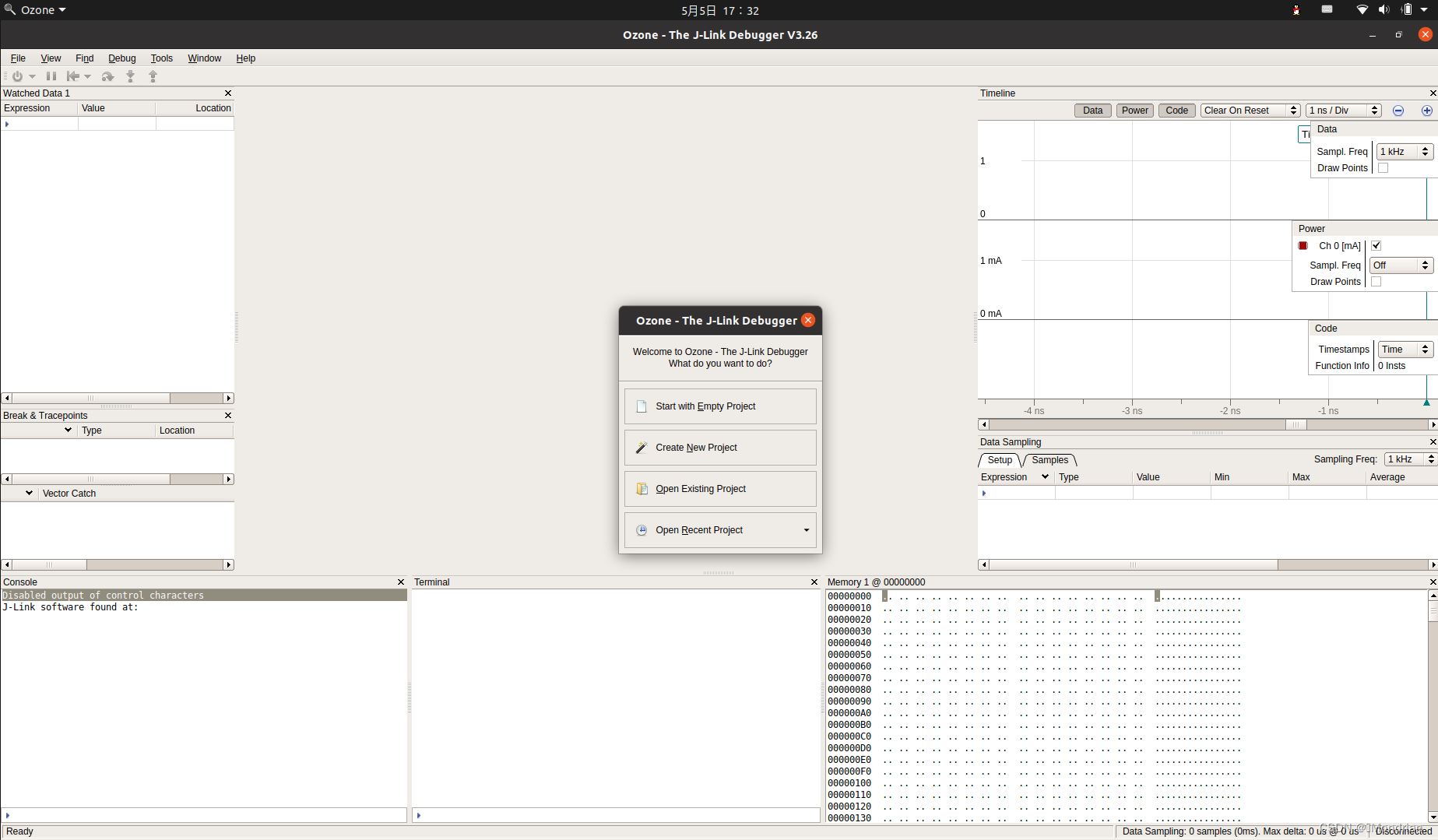
当我们选择“Create New Project”后,就会弹出熟悉的配置界面了,当我们想要调试其它工程或其它芯片的时候可以选择这个。
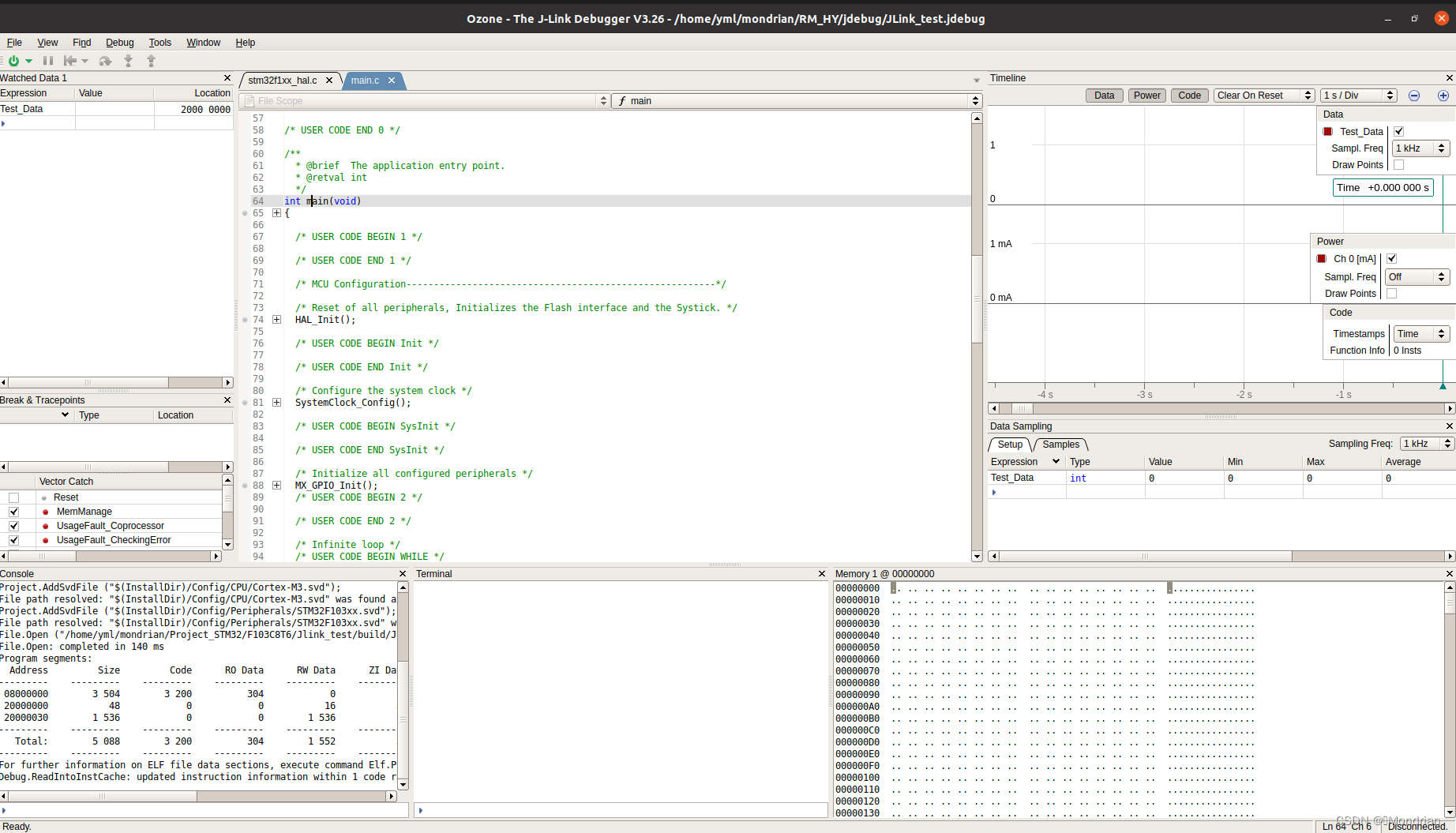
5、关于代码修改与调试
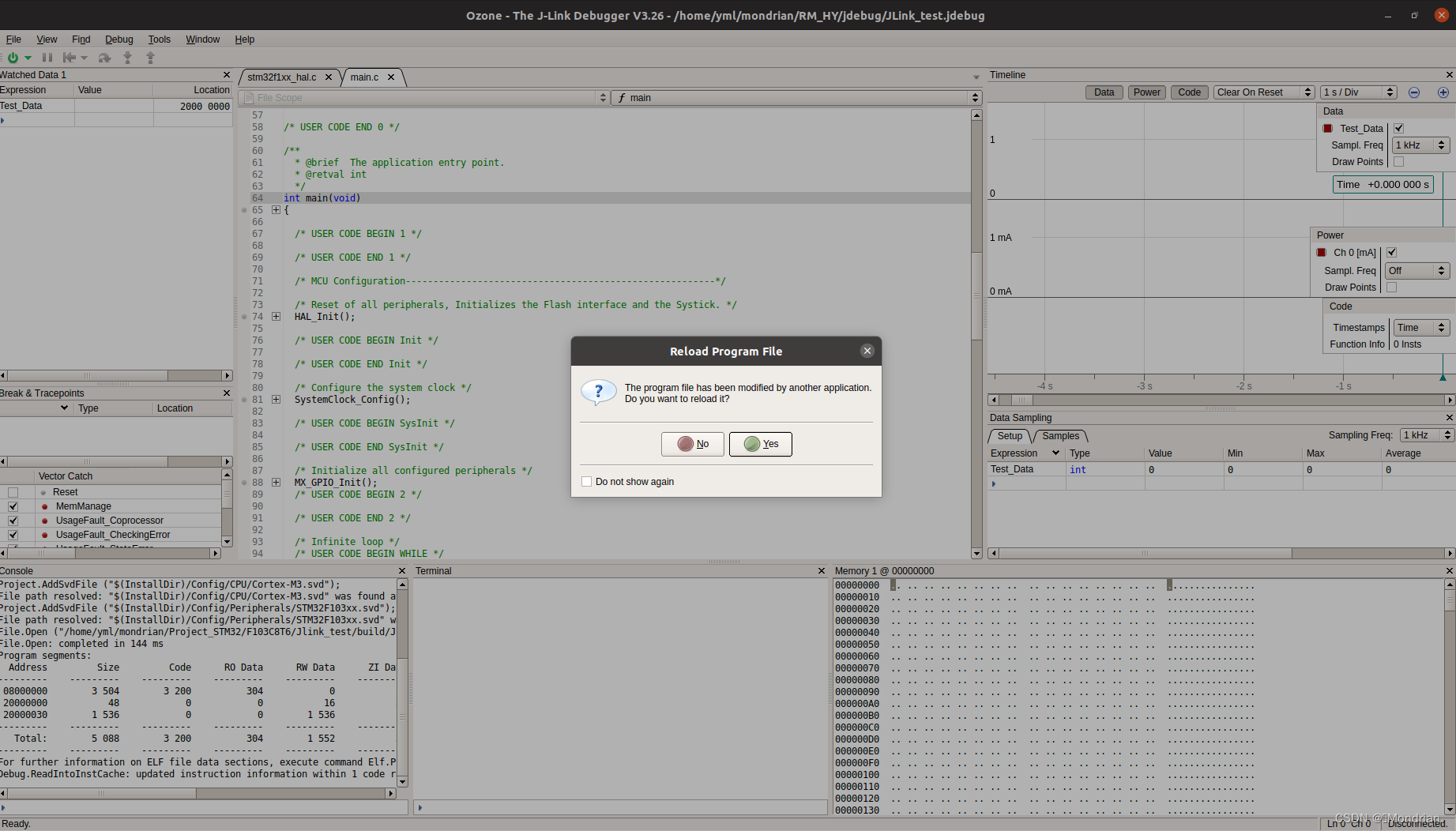
在这个环境下,我们是使用VScode来编写代码,使用Ozone来进行调试,当我们在调试过程中发现了问题,想要修改代码的时候,可以直接暂停Ozone中正在调试的进程,然后打开VScode进行修改。在修改完执行make指令进行编译后,Ozone会检测到代码发生了改变并重新加载.elf文件。
如下图,在VScode中做了修改后,Ozone会检测到变化,并提示你加载新的修改,点击“Yes”即可将新修改的内容加载进来。
结束语:
本想着是作为一次配置流程的记录,以方便日后如果系统出了问题,需要重装时,我能快速的重新搭建起来开发环境。但是在慢慢记录的过程中,我想到或许发表了后会有其他小伙伴也来看,所以重头又详细的补充了一些,最后发现洋洋洒洒的写了1万2千多字。这样配置可能不是最优的,会有人觉得又臭又长,网上有更多更好的配置流程,我只是摸索着把自己总结出来的东西进行了一个记录,并且尽量详细的说明每一个步骤。不仅是给自己看吧,也希望能够帮到有需要的人。
最后,再次感谢湖南大学跃鹿战队的电控开源框架basic_framework提供的开发环境搭建思路!

















 463
463

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









