







手术机器人DaVinci由美国Intuitive公司开发,感兴趣的同学自己Baidu,google或者Being。Intuitive将部分产品送给了许多大学和研究机构进行研究。在此基础上形成了基于达芬奇硬件系统的开源代码,在GitHub上都有下载,对于广大从事手术机器人研发的同仁而言,是一个很不错的借鉴和参考。这里要介绍的是由约翰霍普金斯大学(JHU)维护的代码,本篇从安装和编译开始。
1.安装ROS
ubuntu上安装ROS,这是机器人行业的必修课,JHU-DVRK最终生成的可执行的程序是需要ROS环境的。说明一下,本人使用的ubuntu的版本是14.04.5_x64,ROS的版本是indigo。至于安装ROS的step by step,同学们直接去ROS官网吧,或者网络上搜索。无奈本人刚入行不久(还没入门),就不继续献丑了。
2.从GitHub上下载源码
我用的是JHU提供的代码,同学们可以从这个链接从GitHub上下载(https://github.com/jhu-dvrk)
JHU提供了整套的代码,那我们该下载哪些呢,JHU是怎样组织这个工程的呢?
JHU提供的代码整体而言分成两部分:dvrk-ros和cisst-saw。
dvrk-ros是最后运行于ROS之上的应用程序,属于应用层。
cisst-saw(Computer-Integrated Surgical Systems and Technology,计算机集成外科系统与技术,Surgical Assistant Workstation,外科辅助工作站)是dvrk-ros要调用的各种组件和库,包括运动学、动力学、立体视觉等等,属于中间层和底层,应该说cisst-saw是整套工程的重点,对于热心研究自动控制的同学而言是一份不错的自学材料,不要错过哦。
这两部分的代码在不同地址下载:
dvrk-ros:https://github.com/jhu-dvrk/dvrk-ros
cisst-saw:https://github.com/jhu-cisst/cisst-saw,同学们若是按照这个地址下载会发现,从GitHub下载得来的cisst-saw-master.zip文件只有9K左右,进一步解压之后会发现,每个目录下面都是空的!说好的是重点的呢?怎么什么都没有呢?同学们不要着急,让晚生解释给你听。这其实是JHU告诉大家,cisst-saw这一层的工程组织就是按照这些空目录的方式组织的。至于具体的干货,需要按照这些目录指出的工程去https://github.com/jhu-cisst和https://github.com/jhu-saw下面去找。
这个cisst-saw分两部分,一个是cisst目录,一个是以saw打头的目录(不止一个哦)。见图1:
图1:

OMG,怎么这么多工程?确实很多,不过作为第一步,先玩起来才是目标,经过晚生琢磨,简化结果如下:
图2

是不是少了很多?有人会有怀疑了,凭什么这么少呢?其实,这也是有根据的,同学们去https://github.com/jhu-dvrk看一下,有两个重要的工程:dvrk-ros和sawIntuitiveResearchKit,其实dvrk-ros要依赖的是sawIntuitiveResearchKit!进一步进入sawIntuitiveResearchKit的链接https://github.com/jhu-dvrk/sawIntuitiveResearchKit,会发现JHU说,sawIntuitiveResearchKit要依赖cisst、sawRobotIO1394、sawControllers和sawConstraintController,经过进一步测试,发现还需要sawKeboard和sawTextToSpeech。因此最终要下载的cisst-saw工程就如图2所示。
至此,相信吃瓜群众都能看明白我们需要从JHU的GitHub上下载什么了,好,下面贴一下各个工程的下载地址。
cisst的下载地址,https://github.com/jhu-cisst/cisst。这个目录下面都是干货,所有的底层代码全部在里面,包括前面提到的运动学、动力学、立体视觉等等,见图3
图3

saw*部分的下载链接:
sawConstraintController,https://github.com/jhu-saw/sawConstraintController,不清楚这个是干什么的
sawControllers,https://github.com/jhu-saw/sawControllers,不清楚这个是干什么的
sawIntuitiveResearchKit,https://github.com/jhu-dvrk/sawIntuitiveResearchKit,记住,dvrk-ros就是依赖这个,这个在依赖其他的哦
sawKeyboard,https://github.com/jhu-saw/sawKeyboard,不清楚这个是干什么的
sawRobotIO1394,https://github.com/jhu-saw/sawRobotIO1394,这个应该是连1394相机用的,机器人需要眼睛的嘛。也有可能是其他高速设备连接用的lib。
sawTextToSpeech,https://github.com/jhu-saw/sawTextToSpeech,这个应该是文字转语音的,看来daVinci还是很智能的,会说话。
sawControllers,https://github.com/jhu-saw/sawControllers,不清楚这个是干什么的
sawIntuitiveResearchKit,https://github.com/jhu-dvrk/sawIntuitiveResearchKit,记住,dvrk-ros就是依赖这个,这个在依赖其他的哦
sawKeyboard,https://github.com/jhu-saw/sawKeyboard,不清楚这个是干什么的
sawRobotIO1394,https://github.com/jhu-saw/sawRobotIO1394,这个应该是连1394相机用的,机器人需要眼睛的嘛。也有可能是其他高速设备连接用的lib。
sawTextToSpeech,https://github.com/jhu-saw/sawTextToSpeech,这个应该是文字转语音的,看来daVinci还是很智能的,会说话。
需要下载的代码就是上面提到的,还有一些编译时要用到的工具性软件,在后面逐步介绍。
3.编译下载得到的代码
前面提到,总的来说分成两个目录去编译:dvrk-ros和cisst-saw。
因为dvrk-ros要依赖cisst-saw,因此咱们先编译cisst-saw。
3.1 编译cisst-saw
在JHU的wiki上,JHU反复强调cisst-saw部分要用CMake去编译,那我们就按照CMake的一般规则,先在cisst-saw的同级目录下建立一个build目录,咱们就建议build_cisst_saw吧:
sudo mkdir build_cisst_saw
cd build_cisst_saw
编译之前注意备份好cisst-saw目录,后面要删掉重来的,因此需要备份
好,直接cmake吧:
cmake ../cisst-saw,成功了,继续make吧。等了好久,终于结束了,全部编译通过了,So easy。
不幸的是,没这么简单。
上面提到的,dvrk要依赖sawIntuitivResearchKit,sawIntuitiveResearchKit又要依赖其他5个。看一下JHU在cisst-saw目录下提供的CMakeList.txt,发现内容如下:
cisst_offer_saw_component (sawKeyboard ON)
cisst_offer_saw_component (sawTextToSpeech ON)
cisst_offer_saw_component (saw3Dconnexion OFF)
cisst_offer_saw_component (sawCANBus OFF)
cisst_offer_saw_component (sawControllers OFF)
cisst_offer_saw_component (sawConstraintController OFF)
cisst_offer_saw_component (sawTrajectories OFF)
cisst_offer_saw_component (sawBarrett OFF)
cisst_offer_saw_component (sawCMUSphinx4 OFF)
cisst_offer_saw_component (sawClaronMicronTracker OFF)
cisst_offer_saw_component (sawDataPlayer OFF)
cisst_offer_saw_component (sawGLUTSimulator OFF)
cisst_offer_saw_component (sawIntuitiveDaVinci OFF)
cisst_offer_saw_component (sawTextToSpeech ON)
cisst_offer_saw_component (saw3Dconnexion OFF)
cisst_offer_saw_component (sawCANBus OFF)
cisst_offer_saw_component (sawControllers OFF)
cisst_offer_saw_component (sawConstraintController OFF)
cisst_offer_saw_component (sawTrajectories OFF)
cisst_offer_saw_component (sawBarrett OFF)
cisst_offer_saw_component (sawCMUSphinx4 OFF)
cisst_offer_saw_component (sawClaronMicronTracker OFF)
cisst_offer_saw_component (sawDataPlayer OFF)
cisst_offer_saw_component (sawGLUTSimulator OFF)
cisst_offer_saw_component (sawIntuitiveDaVinci OFF)
set (IS_QNX FALSE)
if ("${CMAKE_SYSTEM_NAME}" STREQUAL "QNX")
set (IS_QNX TRUE)
endif ("${CMAKE_SYSTEM_NAME}" STREQUAL "QNX")
cisst_offer_saw_component (sawJR3ForceSensor OFF)
if ("${CMAKE_SYSTEM_NAME}" STREQUAL "QNX")
set (IS_QNX TRUE)
endif ("${CMAKE_SYSTEM_NAME}" STREQUAL "QNX")
cisst_offer_saw_component (sawJR3ForceSensor OFF)
cisst_offer_saw_component (sawLoPoMoCo OFF)
cisst_offer_saw_component (sawMedtronicStealthlink OFF)
cisst_offer_saw_component (sawMicroScribeDigitizer OFF)
cisst_offer_saw_component (sawNDITracker OFF)
cisst_offer_saw_component (sawNovintFalcon OFF)
cisst_offer_saw_component (sawOpenAL OFF)
cisst_offer_saw_component (sawOpenDynamicsEngine OFF)
cisst_offer_saw_component (sawOpenIGTLink OFF)
cisst_offer_saw_component (sawOpenNI OFF)
cisst_offer_saw_component (sawOpenSceneGraph OFF)
cisst_offer_saw_component (sawSartoriusScale OFF)
cisst_offer_saw_component (sawSensablePhantom OFF)
cisst_offer_saw_component (sawRobotIO1394 OFF)
cisst_offer_saw_component (sawATIForceSensor OFF)
cisst_offer_saw_component (sawAtracsysFusionTrack OFF)
cisst_offer_saw_component (sawMedtronicStealthlink OFF)
cisst_offer_saw_component (sawMicroScribeDigitizer OFF)
cisst_offer_saw_component (sawNDITracker OFF)
cisst_offer_saw_component (sawNovintFalcon OFF)
cisst_offer_saw_component (sawOpenAL OFF)
cisst_offer_saw_component (sawOpenDynamicsEngine OFF)
cisst_offer_saw_component (sawOpenIGTLink OFF)
cisst_offer_saw_component (sawOpenNI OFF)
cisst_offer_saw_component (sawOpenSceneGraph OFF)
cisst_offer_saw_component (sawSartoriusScale OFF)
cisst_offer_saw_component (sawSensablePhantom OFF)
cisst_offer_saw_component (sawRobotIO1394 OFF)
cisst_offer_saw_component (sawATIForceSensor OFF)
cisst_offer_saw_component (sawAtracsysFusionTrack OFF)
if (UNIX)
cisst_offer_saw_component (sawIntuitiveResearchKit OFF)
endif (UNIX)
cisst_offer_saw_component (sawIntuitiveResearchKit OFF)
endif (UNIX)
OMG,需要编译的,JHU几乎默认全部都关闭了,如果要让后面的dvrk-ros顺利进行下去就必须把要依赖的工程改成ON,
这里需要做这些修改:
cisst_offer_saw_component (sawControllers OFF) ->
cisst_offer_saw_component (sawControllers ON)
cisst_offer_saw_component (sawConstraintController OFF) -> cisst_offer_saw_component (sawConstraintController ON)
cisst_offer_saw_component (sawConstraintController OFF) -> cisst_offer_saw_component (sawConstraintController ON)
cisst_offer_saw_component (sawRobotIO1394 OFF) ->
cisst_offer_saw_component (sawRobotIO1394 ON)
cisst_offer_saw_component (sawIntuitiveResearchKit OFF) ->
cisst_offer_saw_component (sawIntuitiveResearchKit ON)
不过若是不做上面的修改,最重要的cisst倒是编译通过了,只关心底层技术的同学可以就此结束了。当然,要想把daVinci整套代码跑起来,还是得继续下去。
现在在build_cisst-saw下面执行rm -rf *,把这个目录全部清空。
好,现在可以继续了,在build_cisst-saw目录下执行cmake ../cisst-saw,这回发现cmake失败了,提示信息如下:
-- Could NOT find Curses (missing: CURSES_LIBRARY CURSES_INCLUDE_PATH)
Can't compile curses based test programs for Amp1394, make sure you have libcurses dev installed
CMake Warning at /home/shaquille/WorkSpace/DVRK/build_cisst-saw/cisst/cisst-config.cmake:143 (message):
find_package: cisst library "cisstTestsDriver" doesn't exist or hasn't been
compiled
Call Stack (most recent call first):
sawRobotIO1394/tests/CMakeLists.txt:25 (find_package)
Can't compile curses based test programs for Amp1394, make sure you have libcurses dev installed
CMake Warning at /home/shaquille/WorkSpace/DVRK/build_cisst-saw/cisst/cisst-config.cmake:143 (message):
find_package: cisst library "cisstTestsDriver" doesn't exist or hasn't been
compiled
Call Stack (most recent call first):
sawRobotIO1394/tests/CMakeLists.txt:25 (find_package)
CMake Error at sawIntuitiveResearchKit/components/CMakeLists.txt:38 (message):
You need to make sure CISST_USE_SI_UNITS to ON
-- Configuring incomplete, errors occurred!
首先cmake提示咱们没有安装libcurses-dev,那咱们就安装吧,apt-get install libncurses5-dev
安装完成之后,继续rm -rf *,继续cmake ../cisst-saw,还是有错,提示如下:
CMake Error at sawIntuitiveResearchKit/components/CMakeLists.txt:38 (message):
You need to make sure CISST_USE_SI_UNITS to ON
You need to make sure CISST_USE_SI_UNITS to ON
-- Configuring incomplete, errors occurred!
从这些信息可以看出,ncurses已经被cmake找到了,但是其他地方还有错。
怎么回事呢?其实,cisst-saw这个目录下的工程是要根据实际情况去配置的,因此需要修改一些cmake的工程配置,那如何修改cmake的工程配置呢?这里就不能简单的命令行操作了,需要用到cmake-gui。没用过的同学没关系,在Terminal里面试一下cmake-gui,没有的话就apt-get install cmake-gui。具体cisst-saw如何编译,最好先看一下JHU的官方声明,具体链接地址:https://github.com/jhu-cisst/cisst/wiki/Compiling-cisst-and-SAW-with-CMake。在继续任务之前,最好安装好qt5,本人的ubuntu是14.04.5,按照JHU的提示安装Qt5,执行sudo apt-get install qt5-default libqt5xmlpatterns5-dev。现在假设你装好了cmake-gui,先将build_cisst_saw下的文件全部删掉sudo rm -rf *,再清空cisst-saw目录下的内容,把刚才备份的cisst-saw目录下的内容全部拷贝到刚才被清空的cisst-saw目录下。在build_cisst_saw目录下执行:
sudo cmake-gui ../cisst_saw
3.2 使用cmake进行编译配置
执行cmake-gui之后出现cmake的配置界面,点击“Browse Source”指定cisst-saw目录(其实就是指定cisst-saw目录下CMakeList.txt的位置)。再点击“Browse Build”按钮,选择已经建立好的build_cisst-saw目录。最后勾选“Grouped”和“Advance”复选框,最终如图4所示:
图4

在这个界面上结合JHU的说明(https://github.com/jhu-cisst/cisst/wiki/Compiling-cisst-and-SAW-with-CMake)和咱们的实际情况,就可以进行工程的配置了。按照JHU的要求有几个是必须要选的:
CISSTNETLIB_DOWNLOAD_NOW
CISST_HAS_CISSTNETLIB
CISST_HAS_CISSTNETLIB
有几个是可选的,不过还是建议选上
CISST_XML_LIB,这个需要有libxml2的支持哦,强烈建议选上
CISST_HAS_SWIG_PYTHON ,这个需要有Python的支持,如果同学门的ubuntu上已经有SWIG和numpy的话,最好装上。本人没有,就没选了。
CISST_XML_LIB,这个需要有libxml2的支持哦,强烈建议选上
CISST_HAS_SWIG_PYTHON ,这个需要有Python的支持,如果同学门的ubuntu上已经有SWIG和numpy的话,最好装上。本人没有,就没选了。
CISST_HAS_QT5,刚才本文已经提示要安装了,选上CISST_HAS_QT5就不能再选CISST_HAS_QT4了,这个一定要注意哦,不然CMake会提示出错的。
CISST_BUILD_TESTS,这个需要CPPUnit的支持,ubuntu上直接apt-get install libcppunit-dev就可以了
CISST_BUILD_TESTS,这个需要CPPUnit的支持,ubuntu上直接apt-get install libcppunit-dev就可以了
CISST_USE_SI_UNITS,之前编译不过就是因为没选这个,现在选上吧
CISST_cisstRobot,这个看起来就不明觉厉,还是选上吧
CISST_HAS_JSON,这个一定要选上哦,不然后面编译不过的。没有安装JSON的需要执行apt-get install libjsoncpp-dev
SAW_sawTrajectories,这个应该是搞路径规划的,在SAW目录下,里面有不少干货,强烈建议选上
根据实际情况设定好之后,就点击“Configure”按钮,让cmake帮你生成make所需的文件吧。
不过cmake提示有错,如图5和图6所示:
图5

图6

其实这个和之前的CISST_HAS_CISSTNETLIB有关,这次配置选项里多了一个Ungrouped Entries和CISSTNETLIB,展开它们,在CISSTNETLIB_DOWNLOAD_ARCHITECTURE中填写“x86_64”,在CISSTNETLIB中勾选其中的CISSTNETLIB_DOWNLOAD_NOW。
再次点击“Configure”按钮,从cmake的log中就会看到cmake在下载cisstNetlib:
Downloading: http://unittest.lcsr.jhu.edu/cisst/downloads/cisstNetlib/uncompressed/cisstNetlib-Fortran-3.0.0-Linux-x86_64.tgz
因为要下载,所以会耽误一点时间,天朝的网络访问外网本来就慢,大家耐心等个半小时吧
等待下载完成之后,cmake会提示配置成功。这个时候要留意一下QT目录下面cmake给生成的qt的路径是否是qt5的(cmake默认生成的是qt4的),要保证那些目录对应qt5的目录。改完之后再次点击“Configure”。
一切准备就绪之后点击“Generate”,这样配置阶段就大功告成,开始make吧。
由于工程很多,编译需要一点时间。编译结束时,make提示编译成功了,进行最后一步make install。
3.3 编译dvrk-ros
dvrk-ros的编译工作相对少一点,参考一下JHU的说明即可:https://github.com/jhu-dvrk/sawIntuitiveResearchKit/wiki/CatkinBuild
dvrk-ros需要依赖cisst-ros,因此还要编译cisst-ros(下载地址:https://github.com/jhu-cisst/cisst-ros)
需要说明的是,dvrk-ros不是用catkin make,需要用catkin build,编译之前需要安装这个工具sudo apt-get install python-catkin-tools。具体编译步骤如下:
1.建立一个build目录,mkdir catkin_dvrkros_ws,进入这个目录cd catkin_dvrkros_ws
2.建立src目录,mkdir src
3.初始化ROS的工作空间,catkin build
4.将当前workspace路径告诉ROS,source ./devel/setup.bash
5.进入src目录,cd src
6.在src中建立cisst-ros,mkdir cisst-ros
7.进入cisst-ros目录,从git上获取cisst-ros源码,git clone https://github.com/jhu-cisst/cisst-ros
8.在src中建立dvrk-ros,mkdir dvrk-ros
8.在src中建立dvrk-ros,mkdir dvrk-ros
9.进入cisst-ros目录,从git上获取dvrk-ros源码,git clone https://github.com/jhu-dvrk/dvrk-ros
10.一切准备妥当,开始编译,执行catkin build
执行到sawRobotIO1394的时候提示出错了,出错信息如下:
Errors << dvrk_robot:cmake /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/logs/dvrk_robot/build.cmake.002.log
Information: cisst has been found in "/usr/local/", headers are in "/usr/local//include"
CMake Error at /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/CMakeLists.txt:63 (find_package):
Could not find a configuration file for package "sawControllers" that is
compatible with requested version "1.4.0".
Information: cisst has been found in "/usr/local/", headers are in "/usr/local//include"
CMake Error at /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/CMakeLists.txt:63 (find_package):
Could not find a configuration file for package "sawControllers" that is
compatible with requested version "1.4.0".
The following configuration files were considered but not accepted:
/usr/local/share/sawRobotIO1394/sawRobotIO1394Config.cmake, version: unknown
实际上,这个地方实际上是因为cmake漏掉了一些copy的工作,参照一下/usr/local/share/sawRobotIO1394和/usr/local/share/sawTextToSpeech目录下的文件的区别,如图7和图8所示:
图7
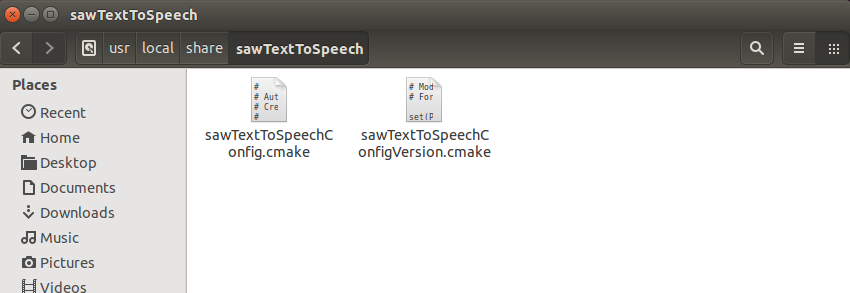
图8
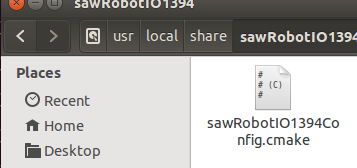
发现/usr/local/share/sawRobotIO1394下有一个文件,而/usr/local/share/sawTextToSpeech下有两个文件。实际上sawTextToSpeechConfigVersion.cmake仅仅指明了sawTextToSpeech版本信息。弄清楚这个问题,将sawTextToSpeechConfigVersion.cmake复制到/usr/local/share/sawRobotIO1394目录下,并且改名为sawsawRobotIO1394ConfigVersion.cmake。打开sawRobotIO1394Config.cmake中规定了版本号是1.4.0,那就需要将sawsawRobotIO1394ConfigVersion.cmake中的版本号也改成1.4.0。此外,sawControllers和sawIntuitiveResearchKit也有同样的问题,那就用同样的方法做一些修改。
继续编译,版本信息出错的问题没有了,但是还有其他错,提示说
/usr/bin/ld: cannot find -lsawControllersQt
这个很显然是因为没找到sawControllersQt,在/usr/local/lib下面只有其他编译出来的.a文件,确实没有libsawControllersQt.a,如图9所示:
图9

那libsawControllersQt.a在哪呢?去build_cisst_saw目录下的cisst/lib下面去找一下,那些.a都在里面,找到libsawControllersQt.a,并将其copy到/usr/local/lib目录下。
继续catkin_build,又提示出错了:
Errors << dvrk_robot:make /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/logs/dvrk_robot/build.make.002.log
/home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/src/dvrk_full_ros.cpp:53:6: warning: unused parameter ‘sig’ [-Wunused-parameter]
void mySigintHandler(int sig)
^
In file included from /usr/local/include/sawIntuitiveResearchKit/mtsIntuitiveResearchKitMTM.h:23:0,
from /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/src/dvrk_mtm_ros.cpp:28:
/usr/local/include/sawIntuitiveResearchKit/mtsIntuitiveResearchKitArm.h:39:69: fatal error: sawIntuitiveResearchKit/mtsIntuitiveResearchKitArmTypes.h: No such file or directory
#include <sawIntuitiveResearchKit/mtsIntuitiveResearchKitArmTypes.h>
^
compilation terminated.
make[2]: *** [CMakeFiles/dvrk_mtm_ros.dir/src/dvrk_mtm_ros.cpp.o] Error 1
make[1]: *** [CMakeFiles/dvrk_mtm_ros.dir/all] Error 2
make: *** [all] Error 2
意思就是说在下面没找到mtsIntuitiveResearchKitArmTypes.h,继续在~/build_cisst_saw里面找,找到include目录,找到sawIntuitiveResearchKit目下,果然有mtsIntuitiveResearchKitArmTypes.h,继续将其copy到/usr/local/include/sawIntuitiveResearchKit目录下。
/home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/src/dvrk_full_ros.cpp:53:6: warning: unused parameter ‘sig’ [-Wunused-parameter]
void mySigintHandler(int sig)
^
In file included from /usr/local/include/sawIntuitiveResearchKit/mtsIntuitiveResearchKitMTM.h:23:0,
from /home/shaquille/WorkSpace/DVRK/catkin_dvrkros_ws/src/dvrk-ros/dvrk-ros/dvrk_robot/src/dvrk_mtm_ros.cpp:28:
/usr/local/include/sawIntuitiveResearchKit/mtsIntuitiveResearchKitArm.h:39:69: fatal error: sawIntuitiveResearchKit/mtsIntuitiveResearchKitArmTypes.h: No such file or directory
#include <sawIntuitiveResearchKit/mtsIntuitiveResearchKitArmTypes.h>
^
compilation terminated.
make[2]: *** [CMakeFiles/dvrk_mtm_ros.dir/src/dvrk_mtm_ros.cpp.o] Error 1
make[1]: *** [CMakeFiles/dvrk_mtm_ros.dir/all] Error 2
make: *** [all] Error 2
意思就是说在下面没找到mtsIntuitiveResearchKitArmTypes.h,继续在~/build_cisst_saw里面找,找到include目录,找到sawIntuitiveResearchKit目下,果然有mtsIntuitiveResearchKitArmTypes.h,继续将其copy到/usr/local/include/sawIntuitiveResearchKit目录下。
继续编译,继续说缺少mtsVFDataFollow.h,回到刚才那个目录,继续将mtsVFDataFollow.h往/usr/local/include/sawIntuitiveResearchKit下面copy。
继续编译,终于全部成功了,提示如下:
Finished <<< dvrk_teleop [ 23.0 seconds ]
[build] Summary: All 9 packages succeeded!
[build] Ignored: None.
[build] Warnings: 1 packages succeeded with warnings.
[build] Abandoned: None.
[build] Failed: None.
[build] Runtime: 32.9 seconds total.
[build] Note: Workspace packages have changed, please re-source setup files to use them.
好了,今天就到这里吧,希望对同学们有用。
[build] Summary: All 9 packages succeeded!
[build] Ignored: None.
[build] Warnings: 1 packages succeeded with warnings.
[build] Abandoned: None.
[build] Failed: None.
[build] Runtime: 32.9 seconds total.
[build] Note: Workspace packages have changed, please re-source setup files to use them.
好了,今天就到这里吧,希望对同学们有用。















 2886
2886

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









