目录 1.算法仿真效果 2.MATLAB源码 3.算法概述 4.部分参考文献 1.算法仿真效果 matlab2022a仿真结果如下: 2.MATLAB源码 %****************************************************************** %订阅用户可以获得任意一份完整代码,私信博主,留言文章链接和邮箱地址, %一般第二天下午4点前会将完整程序发到邮箱中。 %**************








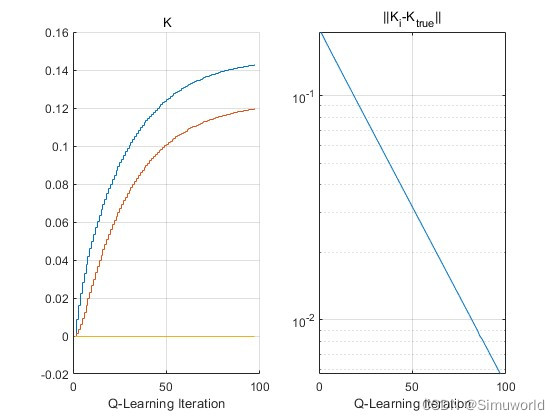
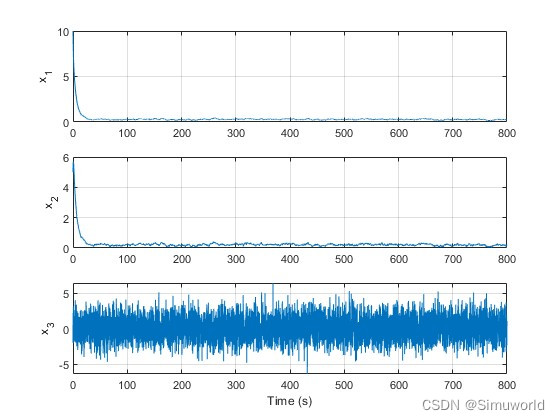
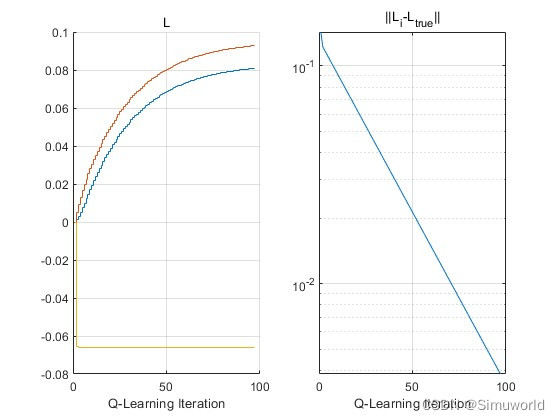
 本文介绍了如何使用Q-learning优化H无穷控制器设计,详细阐述了算法概述并提供了MATLAB仿真结果和源码。通过Q-learning更新控制器参数,以确保系统在不确定性和扰动下的稳定性与性能。尽管这种方法可能面临计算复杂性和维度问题,但在特定场景下能提升控制器性能。
本文介绍了如何使用Q-learning优化H无穷控制器设计,详细阐述了算法概述并提供了MATLAB仿真结果和源码。通过Q-learning更新控制器参数,以确保系统在不确定性和扰动下的稳定性与性能。尽管这种方法可能面临计算复杂性和维度问题,但在特定场景下能提升控制器性能。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








