






高空抛物AI智能检测系统通过现场监控摄像头捕捉到的画面,高空抛物AI智能检测系统利用YOLOv5进行目标检测,实现对高空抛物行为的实时监测。一旦检测到异常物体从高空坠落,系统会立即触发告警机制,通过声音、光线或短信等多种方式通知物业管理人员。系统不仅能够识别抛物行为,还能通过算法精确计算坠物的运动轨迹和落点。这为物业管理人员提供了准确的信息,使他们能够迅速定位到发生高空抛物的具体楼房和位置,及时采取措施,防止潜在的安全事故。
Python是一门解释性脚本语言。解释性语言:解释型语言,是在运行的时候将程序翻译成机器语言;解释型语言的程序不需要在运行前编译,在运行程序的时候才翻译,专门的解释器负责在每个语句执行的时候解释程序代码,所以解释型语言每执行一次就要翻译一次,与之对应的还有编译性语言。编译性语言:编译型语言写的程序执行之前,需要一个专门的编译过程,把程序编译成为机器语言的文件,比如exe文件,以后要运行的话就不用重新翻译了,直接使用编译的结果就行了(exe文件),因为翻译只做了一次,运行时不需要翻译,所以编译型语言的程序执行效率一般来说较高。脚本语言:脚本语言又被称为扩建的语言,或者动态语言,是一种编程语言,用来控制软件应用程序,脚本通常以文本(如ASCII)保存,只在被调用时进行解释或编译。所以一般使用Python来实现特定功能而不是较为复杂的后端。
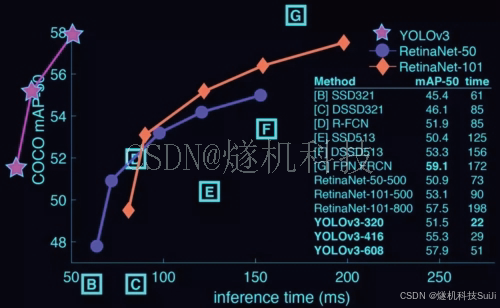
随着城市化进程的加速,高楼大厦如雨后春笋般涌现,高空抛物现象也随之成为城市管理的一大难题。高空抛物不仅对行人安全构成严重威胁,还可能引发法律纠纷和社会问题。为了有效预防和减少高空抛物事件的发生,基于YOLOv5+CNN视觉算法的高空抛物AI智能检测系统应运而生。YOLOv5是一种先进的目标检测算法,以其高速和高准确度在实时目标检测领域占据重要地位。而CNN则在图像识别和特征提取方面表现出色。将两者结合,系统能够精确识别监控画面中的物体,包括坠物的大小、形状和运动轨迹。
class Detect(nn.Module):
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
def __init__(self, nc=80, anchors=(), ch=(), inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
self.inplace = inplace # use in-place ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy = (y[..., 0:2] * 2 - 0.5 + self.grid[i]) * self.stride[i] # xy
wh = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, y[..., 4:]), -1)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0):
d = self.anchors[i].device
if check_version(torch.__version__, '1.10.0'): # torch>=1.10.0 meshgrid workaround for torch>=0.7 compatibility
yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)], indexing='ij')
else:
yv, xv = torch.meshgrid([torch.arange(ny).to(d), torch.arange(nx).to(d)])
grid = torch.stack((xv, yv), 2).expand((1, self.na, ny, nx, 2)).float()
anchor_grid = (self.anchors[i].clone() * self.stride[i]) \
.view((1, self.na, 1, 1, 2)).expand((1, self.na, ny, nx, 2)).float()
return grid, anchor_grid
高空抛物AI智能检测系统的推出,标志着城市管理向智能化、自动化迈出了坚实的一步。系统通过智能分析算法,能够判断出潜在的风险区域和时间,提前发出预警,提醒相关部门和人员注意。这种预防性措施大大降低了安全事故的发生概率。高空抛物AI智能检测系统不仅提高了城市公共安全的保障水平,也为居民营造了一个更加安全、和谐的生活环境。通过实时监测和智能预警,不仅保障了行人的安全,也为物业管理提供了高效的解决方案。


















 312
312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









