







本节内容详细介绍了与眼镜、待测设备(DUT)、光测量设备(LMD)以及增强现实(AR)/虚拟现实(VR)头戴显示设备相关的尺寸规格和术语。文中不仅为这些设备提供了精确的尺寸定义,而且还介绍了多个坐标系统。具体来说,待测设备(DUT)和光学测量设备(LMD)各有一套独立的坐标系统。此外,本文档还解释了这些坐标系统如何与人类眼睛的位置和视角相关联,从而确保测量和显示的准确性。
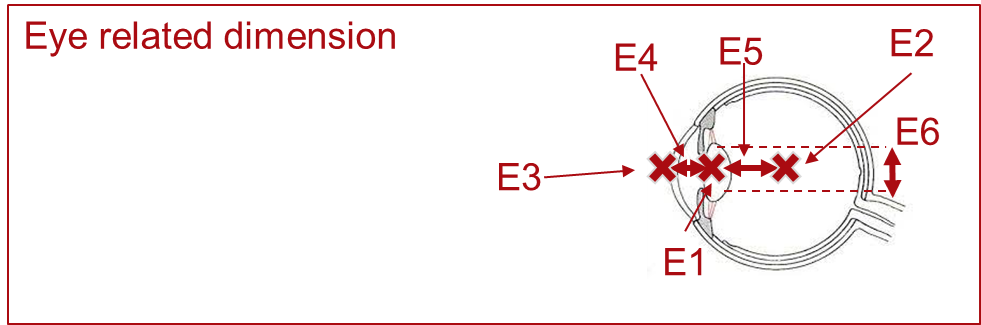
与眼睛相关的尺寸和定义
| 符号 | 名称 | 描述 |
|---|---|---|
| E1 | 瞳孔点 | 眼睛入瞳的中心。 |
| E2 | 眼睛旋转点 | 眼睛的中心,也是眼睛旋转的中心。常用于基于眼睛注视的测量,例如畸变或MTF(调制传递函数)。 |
| E3 | 角膜顶点 | 角膜表面的最前点。 |
| E4 | 角膜顶点至瞳孔点的距离 | 角膜顶点(E3)与瞳孔点(E1)之间的距离,标准值为3毫米(IEC63145-20-10/ICDM)。 |
| E5 | 眼睛旋转点至瞳孔点的距离 | 眼睛旋转点(E2)与瞳孔点(E1)之间的距离,标准值为10毫米(IEC63145-20-10/ICDM)。 |
| E6 | 眼睛入瞳直径 | 眼睛入瞳的直径。 |
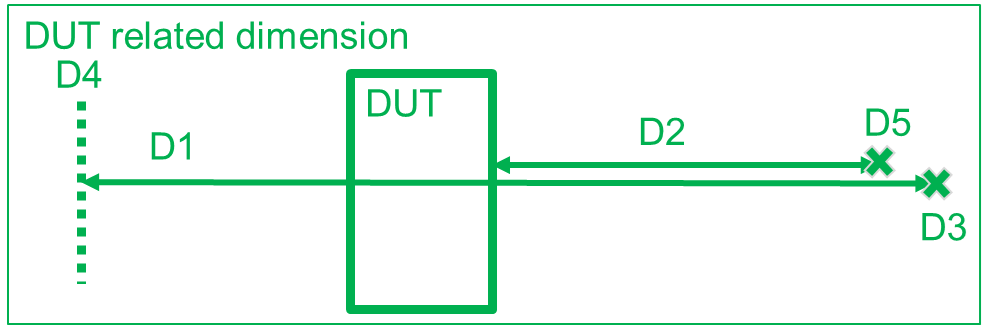
与DUT(被测设备)相关的尺寸和定义
| 符号 | 名称 | 描述 |
|---|---|---|
| D1 | 虚拟像距或焦距 | 眼睛点(D3)到虚拟像平面(D4)之间的距离。 |
| D2 | 眼睛间隔 | 角膜顶点(D5)(眼睛的)到虚拟像显示设备最近光学元件的距离(IEC63145-20-10)。实际应用中,通常将眼睛间隔定义为最近光学元件与眼睛点之间的距离。 |
| D3 | 眼睛点 | 设计位置,在此位置放置眼睛的入瞳,以在使用眼镜显示设备时达到最佳性能,并作为测量的原点位置(IEC63145-20-10)。 |
| D4 | 虚拟像(平面) | 由DUT的光学元件生成的虚拟像。 |
| D5 | 角膜顶点 | 角膜表面的最前点。D5与E3相同。 |
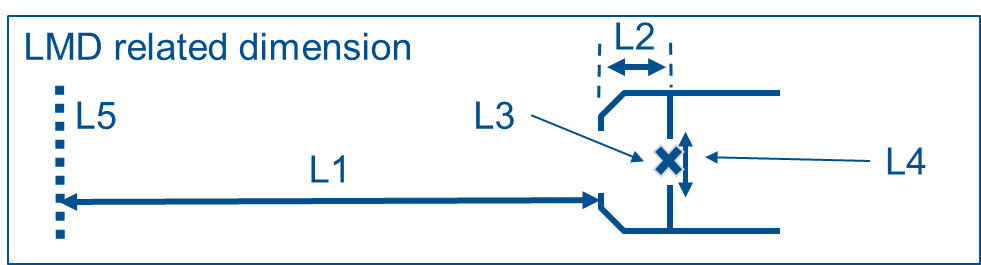
与光测量设备(LMD)相关的尺寸和定义
| 符号 | 名称 | 描述 |
|---|---|---|
| L1 | 焦距 | 镜头到焦点的距离。 |
| L2 | LMD入瞳至光测量设备前表面的距离 | LMD入瞳(L4)与光测量设备前表面之间的距离。 |
| L3 | LMD瞳孔点 | LMD入瞳的中心。 |
| L4 | LMD入瞳直径 | LMD入瞳的直径。 |
| L5 | 焦平面 | 在焦距处的物平面。 |
在系统良好对齐的情况下,所有对应点应相互重叠(参见图1)。
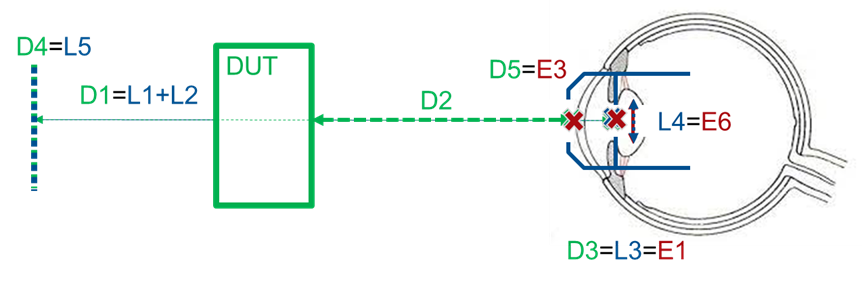
图1: 显示了与DUT对齐的测量设备,并标出了与眼睛相关的尺寸。
AR/VR头戴显示设备中的常见术语
图2展示了AR/MR/VR系统常用术语。有时,“Top”也称为“Sky”,“Bottom”称为“Ground”。
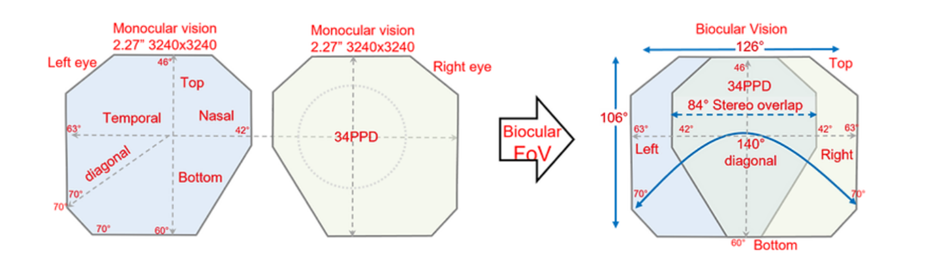
图2: AR/VR头戴显示设备术语与位置
坐标系统
VR测量中有两个关键坐标系统:
-
DUT坐标系统:由被测设备定义。
-
测量设备坐标系统:由测量设备定义。
根据国际电工委员会(IEC)2019年发布的《IEC 63145-20-10:2019 Eyewear display - Part 20-10: Fundamental measurement methods - Optical properties》中的坐标系统(参见图3)。
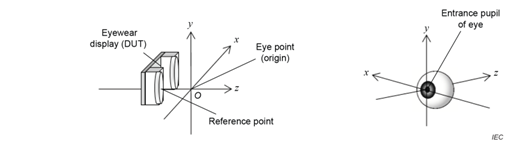
图3:坐标系定义,来源:《IEC 63145-20-10:2019 Eyewear display - Part 20-10: Fundamental measurement methods - Optical properties》
若需模拟视线,应将眼睛的旋转点作为旋转中心(参见图4)。
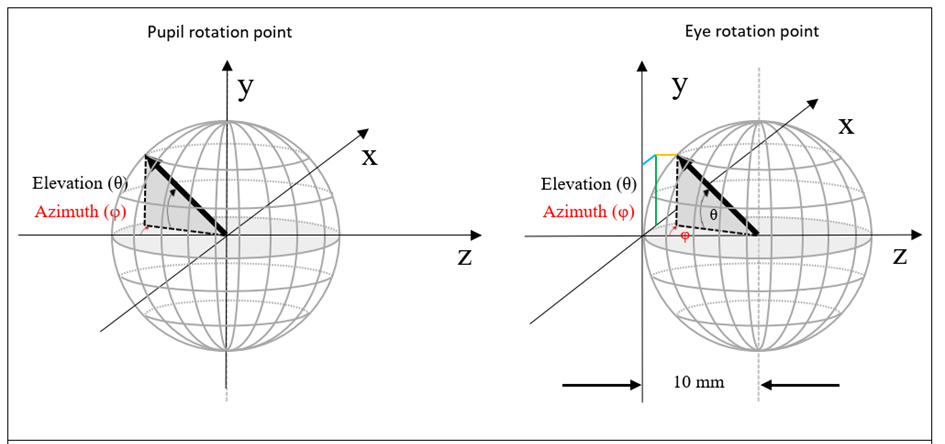
图4: 坐标系定义,来源:信息显示测量标准(ICDM)发布的《ICDM - Information Display Measurements Standard-V1.1a, 2022》
不同坐标系统的表示方法
为了适应不同的应用场景和个人喜好,AR/VR/MR应用允许用户选择多种坐标系统。在AR/VR/MR应用中,通常使用笛卡尔坐标系或球形(极坐标)坐标系。
-
笛卡尔坐标系:x, y, z
-
球形(极坐标)坐标系:θ, φ, R(其中θ表示仰角,φ表示方位角,R表示到原点的距离,即球体的半径)。
在进行畸变测量时,笛卡尔坐标系因其直观性而得到广泛应用。而在进行像素密度测量时,球形坐标系则更加适用,因为它可以更好地反映屏幕上像素的分布情况。在二维测量中,由于不考虑深度信息,坐标的表示方式简化为:
-
笛卡尔坐标系:x, y
-
球形(极坐标)坐标系:θ, φ















 249
249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









