







测试方法概述
| # | 测试方法 | 2D | 点 | 移动点 | 移动2D |
|---|---|---|---|---|---|
| 1 | 眼点对齐(ICDM) | ☒ | ☒ | ☒ | ☒ |
| 2 | 使用十字线进行眼点对准(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 3 | 使用中心亮度进行眼点对准(ICDM) | ☒ | ☒ | ☒ | ☒ |
| 4 | 使用中心分辨率进行眼点对准(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 5 | 使用视场进行眼点对准(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 6 | 利用横向色差对NED眼盒进行中心定位(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 7 | 利用彗差、散光、场曲率对NED眼盒进行中心定位(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 8 | 采用全视场亮度法进行眼点对准(IEC-63145-20-10:2019) | ☒ | ☐ | ☐ | ☒ |
| 9 | 采用Michelson对比度法进行眼点对准(IEC-63145-20-10:2019) | ☒ | ☐ | ☐ | ☒ |
| 10 | 亮度测量(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☐ |
| 11 | 亮度和对比度均匀性测量(ICDM ) | ☒ | ☒ | ☒ | ☐ |
| 12 | 色度和色域测量(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☐ |
| 13 | 色度色域面积均匀性测量(ICDM) | ☒ | ☒ | ☒ | ☐ |
| 14 | 色度均匀性测量(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☐ |
| 15 | 色度均匀性测量(ICDM) | ☒ | ☒ | ☒ | ☐ |
| 16 | 对比度测量(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☐ |
| 17 | 使用大视场LMD测量棋盘格图案的对比度(ICDM) | ☒ | ☐ | ☐ | ☐ |
| 18 | 使用小视场LMD测量棋盘格图案的对比度(ICDM) | ☒ | ☒ | ☒ | ☒ |
| 19 | FOV 亮度测量法(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☐ |
| 20 | FOV Michelson对比度测量法(IEC-63145-20-20:2019) | ☒ | ☐ | ☐ | ☐ |
| 21 | NED 视场角测量(ICDM) | ☒ | ☒ | ☒ | ☐ |
| 22 | FOV 亮度测量法(ICDM) | ☒ | ☒ | ☒ | ☐ |
| 23 | FOV Michelson对比度测量法(ICDM) | ☒ | ☐ | ☐ | ☐ |
| 24 | 眼盒亮度测量法(IEC-63145-20-10:2019) | ☒ | ☒ | ☒ | ☒ |
| 25 | 眼盒Michelson对比度测量法(IEC-63145-20-20:2019) | ☒ | ☐ | ☐ | ☒ |
| 26 | 眼盒中心亮度方法(ICDM) | ☒ | ☒ | ☒ | ☒ |
| 27 | 眼盒Michelson对比度测量法(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 28 | 眼盒Draper 方法(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 29 | 眼盒基于亮度的视场角方法(ICDM) | ☒ | ☒ | ☒ | ☒ |
| 30 | 眼盒基于Michelson对比度的视场角方法(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 31 | 标准畸变测量(IEC-63145-20-20:2019) | ☒ | ☒ | ☒ | ☐ |
| 32 | NED局部几何畸变测量(ICDM) | ☒ | ☐ | ☐ | ☐ |
| 33 | 颜色配准误差标准测量(IEC-63145-20-20:2019) | ☒ | ☒ | ☒ | ☒ |
| 34 | 标准Michelson对比度测量(IEC-63145-20-20:2019) | ☒ | ☐ | ☐ | ☐ |
| 35 | Michelson对比度均匀性测量(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 36 | 焦距测量(IEC-63145-20-20:2019) | ☒ | ☐ | ☐ | ☒ |
| 37 | 视差测量(IEC-63145-20-20:2019) | ☒ | ☒ | ☐ | ☒ |
| 38 | 虚拟图像距离(K. Guo 2019) | ☒ | ☐ | ☐ | ☐ |
| 39 | 虚拟图像距离测量:使用LMD镜头焦点(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 40 | 在视场角内的虚拟图像距离(ICDM) | ☒ | ☐ | ☐ | ☒ |
| 41 | 空间测量(ICDM) | ☒ | ☐ | ☐ | ☐ |
| 42 | 信号对比度(ICDM) | ☒ | ☒ | ☐ | ☐ |
| 43 | 双视自动立体系统串扰(ICDM) | ☒ | ☒ | ☐ | ☐ |
| 44 | 伽马和灰度失真(ICDM) | ☒ | ☒ | ☐ | ☐ |
| 45 | 伽马值测量 (DFF) | ☒ | ☒ | ☐ | ☐ |
| 49 | 像素角密度(IEC-63145-20-10:2019) | ☒ | ☐ | ☐ | ☐ |
表1:测试方法概述
测试图案
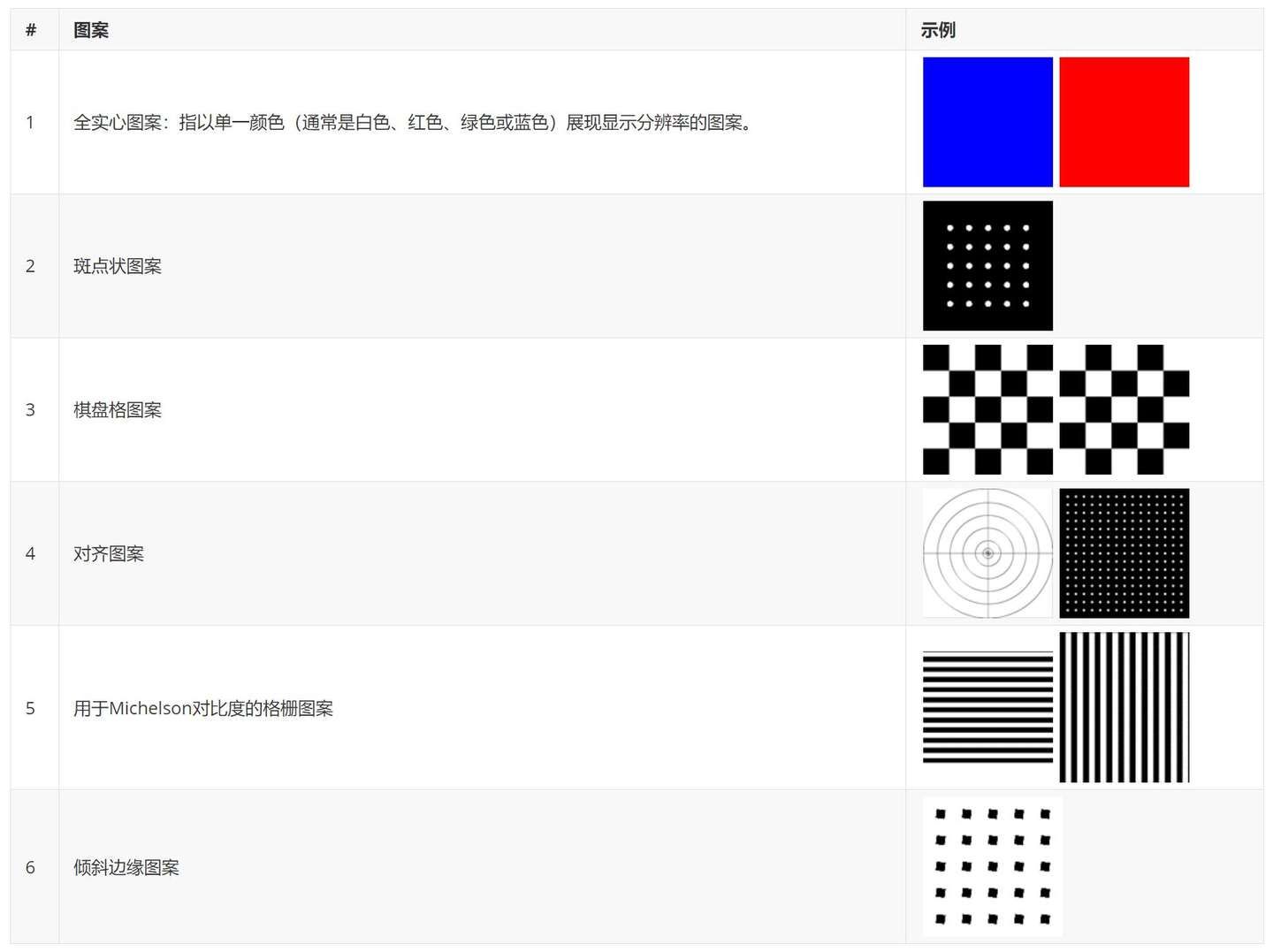
表2:测试图案概览
测量点位的定义
在现行标准中,为了准确评估参数如均匀性,通常规定了5个或9个测量点。这些测量点的具体位置是基于显示器的尺寸来决定的(参见图1)。对于增强现实(AR)、虚拟现实(VR)以及混合现实(MR)的组件或头戴设备,鉴于显示位置与视场内位置之间的关系往往不易确定,测量点也可以依据视场(FOV)来设定。图2提供了一个以FOV为参考的示例。考虑到FOV或显示器的形状可能存在差异,测量点的位置应当进行适当调整,以确保评价结果的准确性和有效性。
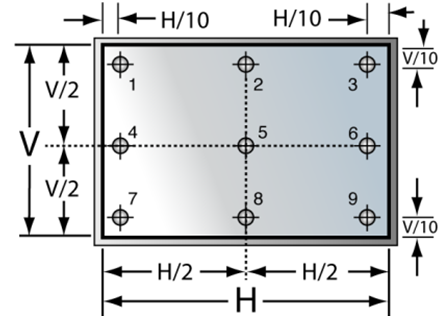
图1:使用显示尺寸定义测量位置的示例
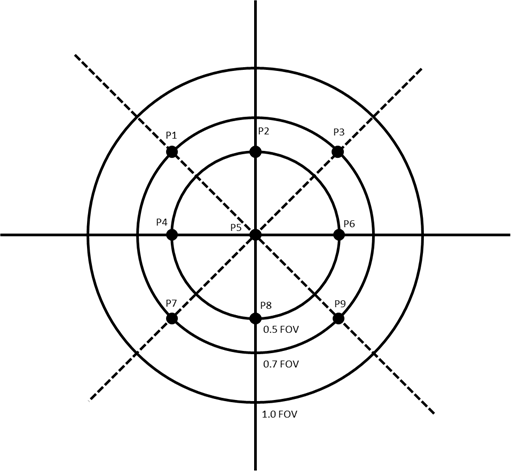
图2:在视场(FOV)尺寸中定义测量点















 6123
6123











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









