






ESP32-S3 通讯口资源简介
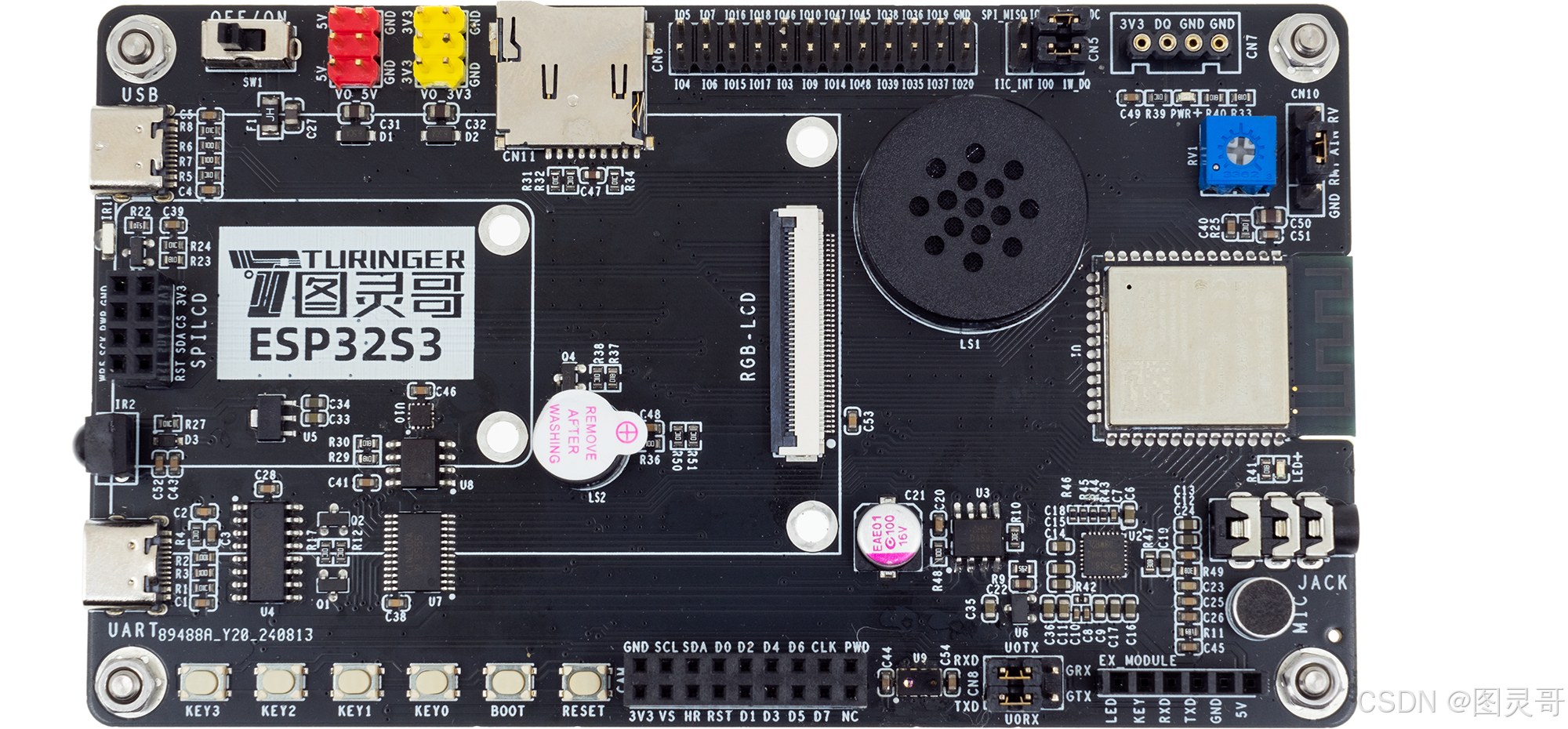
本次实验我们选用的是图灵哥TRGESP32S3拓展板,板子上搭载的是乐鑫科技ESP32-S3-N16R8这颗SOC,同时还用到图灵哥科技的2.4寸屏模块,接口方便接插。
ESP32-S3-N16R8是乐鑫信息科技(Espressif Systems)推出的一款高性能、低功耗的Wi-Fi和蓝牙双模芯片。它继承了ESP32系列的传统,并引入了更为强大的处理能力和丰富的外设资源。
以下是ESP32-S3-N16R8芯片的主要通讯口资源:
- Wi-Fi接口:
- 支持802.11b/g/n协议;
- 支持WPA3安全协议;
- 支持Station、SoftAP、Station+SoftAP三种模式;
- 蓝牙接口:
- 支持蓝牙5.0,包括经典蓝牙和BLE(蓝牙低功耗);
- 支持多种蓝牙Profile,例如SPP、A2DP、HID等;
- USB OTG接口:支持USB 2.0 OTG(On-The-Go)功能,可以作为USB设备或USB主机使用;
- SPI接口:2个SPI控制器,可用于连接外部Flash存储器、显示屏、传感器等设备;
- I2C接口:2个I2C控制器,用于连接各种I2C设备,如传感器、EEPROM等;
- UART接口:3个UART接口,可用于与外部设备进行串行通信,或者用于调试目的;
- I2S接口:2个I2S接口,用于音频信号传输,可以连接外部DAC或ADC,支持I2S或PCM格式;
- SD/SDIO/MMC接口:支持SD卡、SDIO和MMC协议,可用于扩展存储;
- PWM接口:8个PWM控制器,可用于电机控制、调光等应用;
- GPIO接口:丰富的通用输入输出接口(48个),可以配置为数字输入/输出,或者复用为上述提到的各种通讯接口;
- Ethernet接口:支持通过外接以太网物理层(PHY)芯片实现以太网连接;虽然ESP32-S3-N16R8没有内置以太网MAC/PHY,但它可以通过外部PHY芯片和RMII接口来支持以太网连接。
SPI通讯的基本原理
SPI通讯涉及以下几个主要信号线:
- SCLK(时钟线):由主设备(通常是ESP32)提供,用于同步数据的传输;
- MOSI(主设备输出从设备输入):用于主设备向从设备发送数据;
- MISO(主设备输入从设备输出):用于从设备向主设备发送数据;
- SS/CS(从设备选择/片选线):由主设备控制,用于选择要通信的从设备;
ESP32S3的SPI通讯特点:
- 支持多个SPI接口:ESP32提供了多个SPI控制器,可以同时支持多个SPI设备;
- 可配置的时钟频率:ESP32的SPI时钟频率可调,最高可达80MHz;
- 全双工通信:可以同时进行数据的发送和接收;
- 支持DMA(直接内存访问):可以减少CPU的负担,提高数据传输效率;
- 可配置的数据位宽:支持8位、16位、32位等不同的数据位宽;
SPI通讯配置步骤:
- 初始化SPI主机:配置SPI总线的模式、时钟频率、数据位宽等参数;
- 设置片选线:配置SS/CS线,用于选择从设备;
- 数据传输:通过MOSI和MISO线进行数据的发送和接收;
- 关闭SPI主机:在数据传输完成后,关闭SPI主机以节省资源;
主要程序源码
demo_show.cpp
/**
****************************************************************************************************
* @file demo_show.cpp
* @author Turinger Software
* @version V1.0
* @date 2024-09-20
* @brief SPILCD展示代码
* 实验平台 图灵哥 TRGESP32S3探索板
*
****************************************************************************************************
*/
#include "demo_show.h"
#include "spilcd.h"
#include <math.h>
#define PI (float)(3.1415926)
static float cube[8][3] = {
{-16, -16, -16},
{-16, +16, -16},
{+16, +16, -16},
{+16, -16, -16},
{-16, -16, +16},
{-16, +16, +16},
{+16, +16, +16},
{+16, -16, +16}
};
static uint8_t line_id[24] = {
1, 2, 2, 3,
3, 4, 4, 1,
5, 6, 6, 7,
7, 8, 8, 5,
8, 4, 7, 3,
6, 2, 5, 1
};
/**
* @brief 计算矩阵乘法
* @param a : 矩阵a
* b[3][3]: 矩阵b
* @retval 计算结果
*/
static float *demo_matconv(float *a, float b[3][3])
{
float res[3];
uint8_t res_index;
uint8_t a_index;
for (res_index = 0; res_index < 3; res_index++)
{
res[res_index] = b[res_index][0] * a[0] + b[res_index][1] * a[1] + b[res_index][2] * a[2];
}
for (a_index = 0; a_index < 3; a_index++)
{
a[a_index] = res[a_index];
}
return a;
}
/**
* @brief 旋转向量
* @param point: 需要旋转的向量
* x : X轴旋转量
* y : Y轴旋转量
* z : Z轴旋转量
* @retval 计算结果
*/
static void demo_rotate(float *point, float x, float y, float z)
{
float rx[3][3];
float ry[3][3];
float rz[3][3];
x /= PI;
y /= PI;
z /= PI;
rx[0][0] = cos(x);
rx[0][1] = 0;
rx[0][2] = sin(x);
rx[1][0] = 0;
rx[1][1] = 1;
rx[1][2] = 0;
rx[2][0] = -sin(x);
rx[2][1] = 0;
rx[2][2] = cos(x);
ry[0][0] = 1;
ry[0][1] = 0;
ry[0][2] = 0;
ry[1][0] = 0;
ry[1][1] = cos(y);
ry[1][2] = -sin(y);
ry[2][0] = 0;
ry[2][1] = sin(y);
ry[2][2] = cos(y);
rz[0][0] = cos(z);
rz[0][1] = -sin(z);
rz[0][2] = 0;
rz[1][0] = sin(z);
rz[1][1] = cos(z);
rz[1][2] = 0;
rz[2][0] = 0;
rz[2][1] = 0;
rz[2][2] = 1;
demo_matconv(demo_matconv(demo_matconv(point, rz), ry), rx);
}
/**
* @brief 演示立方体3D旋转
* @param 无
* @retval 无
*/
void demo_show_cube(void)
{
uint8_t point_index;
uint8_t line_index;
for (point_index = 0; point_index < 8; point_index++)
{
demo_rotate(cube[point_index], 0.5f, 0.3f, 0.2f);
}
for (line_index = 0; line_index < 24; line_index += 2)
{
/* LCD画线段 */
lcd_draw_line(120 + cube[line_id[line_index] - 1][0],
210 + cube[line_id[line_index] - 1][1],
120 + cube[line_id[line_index + 1] - 1][0],
210 + cube[line_id[line_index + 1] - 1][1],
BLUE);
}
delay(100);
lcd_fill(92, 182, 148, 238, WHITE); /* 填充立方体活动区域 */
}实验效果
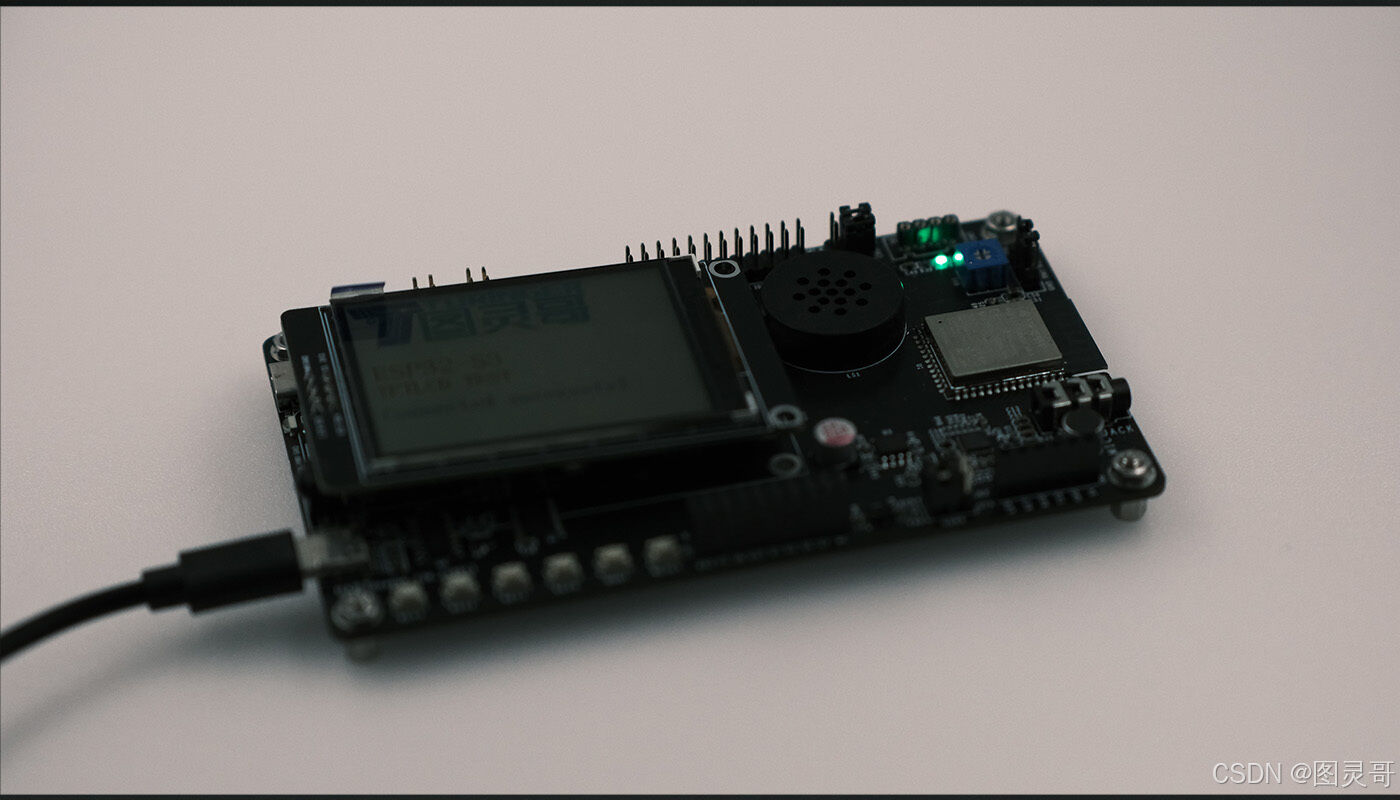
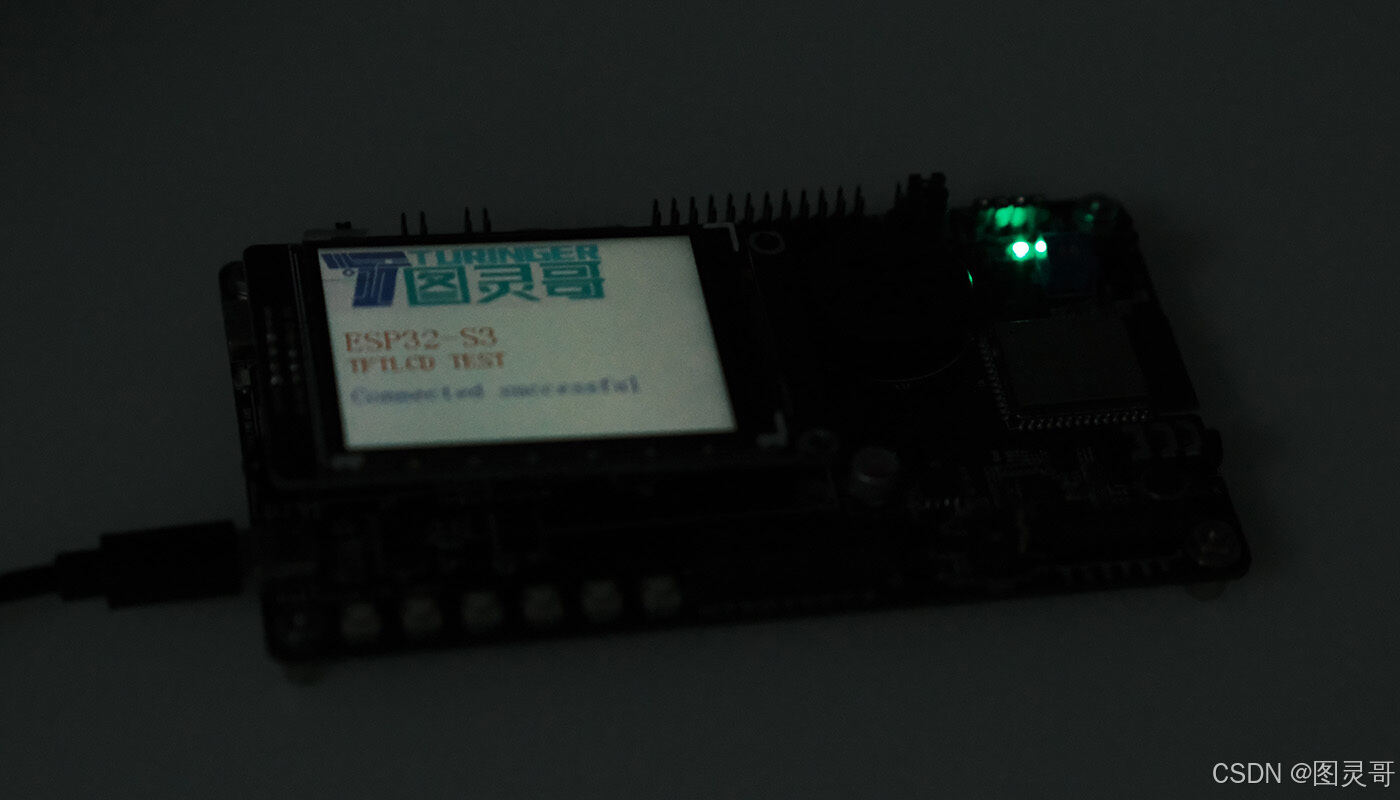
实验到此结束,感谢观看。

















 2345
2345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









