







【模糊逻辑】Type-1 Fuzzy Systems的设计方法和应用
4.1 时间序列预测
设置现在有一个时间序列
s
(
k
)
s(k)
s(k),对于观测者可以获得对应的观测值
x
(
k
)
x(k)
x(k)
x
(
k
)
=
s
(
k
)
+
n
(
k
)
+
I
n
(
k
)
+
J
(
k
)
x(k)=s(k)+n(k)+In(k)+J(k)
x(k)=s(k)+n(k)+In(k)+J(k)
其中
n
(
k
)
n(k)
n(k)为测量误差/噪声,
I
n
(
k
)
In(k)
In(k)为自然干扰,
J
(
k
)
J(k)
J(k)为人为干扰。
现在我们已经构造好了一个观察的时间序列了。现在我们的目标是去时间序列预测,而我们可以利用是数据是历史滑动窗内的数据,这个滑动窗的大小为p。利用前p个观测值,来预测当前 s ( k ) s(k) s(k)。
现在我们拥有N个时间序列的数据
x
(
1
)
,
x
(
2
)
,
.
.
.
,
x
(
N
)
x(1),x(2),...,x(N)
x(1),x(2),...,x(N)
设置前D个点
x
(
1
)
,
x
(
2
)
,
.
.
.
,
x
(
D
)
x(1),x(2),...,x(D)
x(1),x(2),...,x(D)用于训练,即训练集,其中D往往为N的75%~80%;
由此我们的测试集为
x
(
D
+
1
)
,
x
(
D
+
2
)
,
.
.
.
,
x
(
N
)
x(D+1),x(D+2),...,x(N)
x(D+1),x(D+2),...,x(N)
构造D-p个训练组
X
(
1
)
=
[
x
(
1
)
,
.
.
.
,
x
(
p
)
,
x
(
p
+
1
)
]
T
,
.
.
.
,
X
(
D
−
p
)
=
[
x
(
D
−
p
)
,
.
.
.
,
x
(
D
−
1
)
,
x
(
D
)
]
T
,
X^{(1)}=[x(1),...,x(p),x(p+1)]^T, ..., X^{(D-p)}=[x(D-p),...,x(D-1),x(D)]^T,
X(1)=[x(1),...,x(p),x(p+1)]T,...,X(D−p)=[x(D−p),...,x(D−1),x(D)]T,
其中每组的前p个数据作为训练FLS的输入,第p+1的数据作为FLS期望的输出。
同理有N-p-D个检测组
X
(
D
+
1
)
=
[
x
(
D
+
1
)
,
.
.
.
,
x
(
D
+
p
)
,
x
(
D
+
p
+
1
)
]
T
,
.
.
.
,
X
(
N
−
p
)
=
[
x
(
N
−
p
)
,
.
.
.
,
x
(
N
−
1
)
,
x
(
N
)
]
T
,
X^{(D+1)}=[x(D+1),...,x(D+p),x(D+p+1)]^T, ..., X^{(N-p)}=[x(N-p),...,x(N-1),x(N)]^T,
X(D+1)=[x(D+1),...,x(D+p),x(D+p+1)]T,...,X(N−p)=[x(N−p),...,x(N−1),x(N)]T,
值得注意的是,这里的每个训练组都可以为FLS预测器训练对应的规则,而测试集则用于测试各被提取的规则的精度性能。
4.2 提取规则的方法
4.2.1 One-pass method(一次性方法)
4.2.1.1数据赋值法
该方法是利用数据来构造出在规则的前因(antecedent)和后因(consequent)中的模糊集的中心
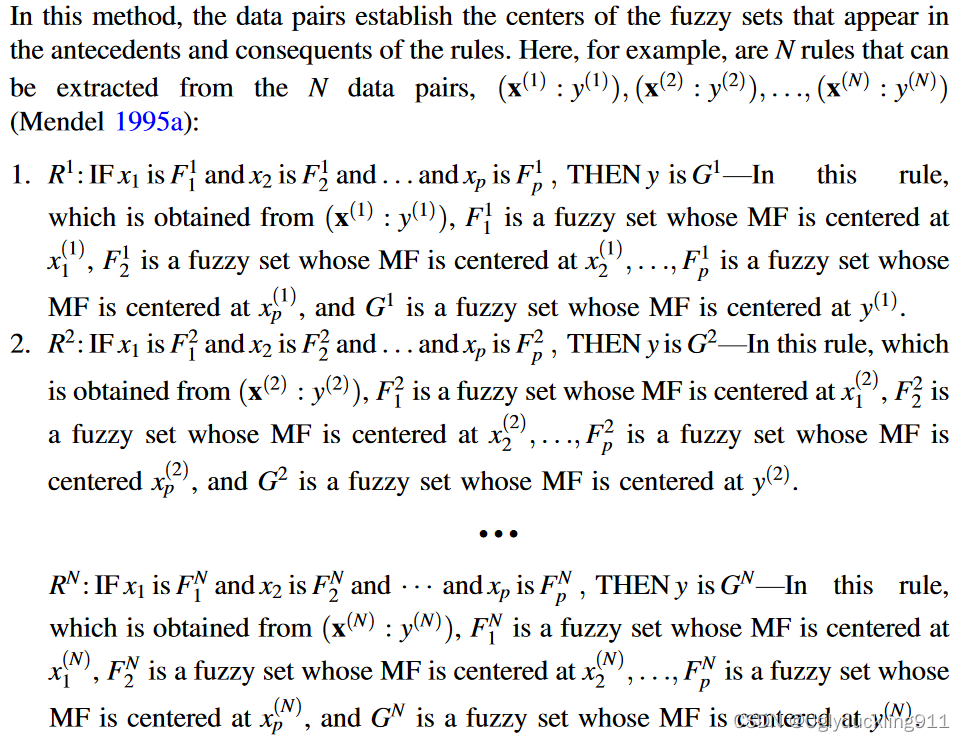
例子1
如果现在
F
i
l
F_i^l
Fil是一个为Gaussian MF的模糊集
μ
F
i
l
(
x
i
)
=
exp
{
−
(
x
i
−
m
F
i
l
)
2
2
σ
F
i
l
2
}
,
i
=
1
,
2
,
.
.
.
,
p
\mu_{F_i^l}(x_i)=\exp \{-\frac{(x_i-m_{F_i^l})^2}{2\sigma_{F_i^l}^2}\},i=1,2,...,p
μFil(xi)=exp{−2σFil2(xi−mFil)2},i=1,2,...,p
对于一个规则来说,前因参数数目为2p,后因参数数目为1,
现在我们有D-p个测试组,即有D-p个规则,那么总共涉及到了
(
2
p
+
1
)
(
D
−
p
)
(2p+1)(D-p)
(2p+1)(D−p)个参数。
针对以上的例子,问题的关键是,我们应该如何去选择大量的MF和初始化大量的参数
4.2.1.1 WM方法
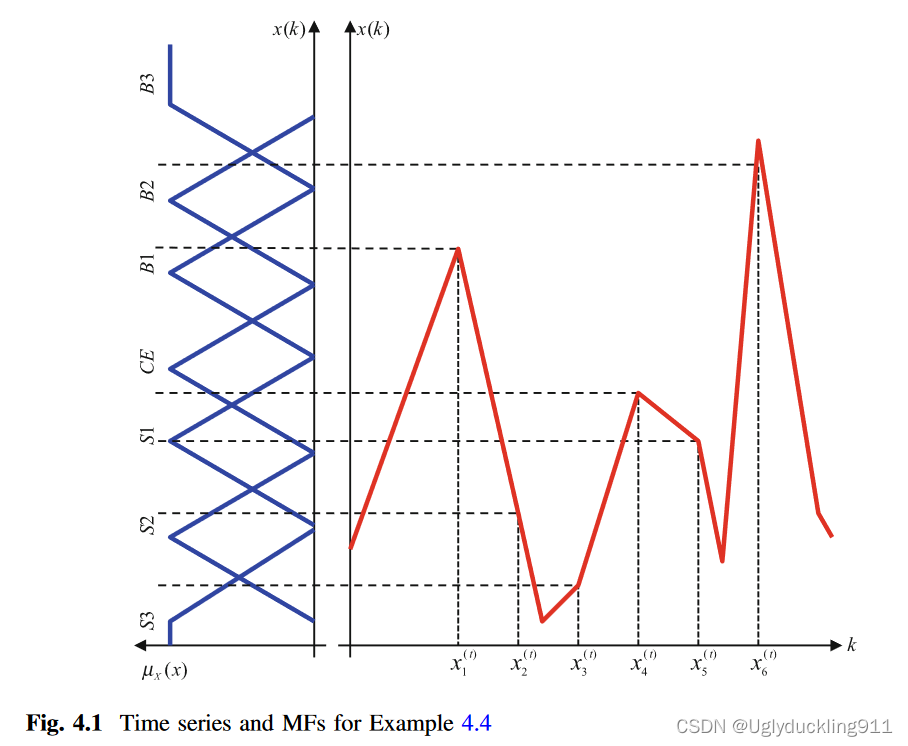 该方法主要是通过预指定好前因和后因的数据,然后将将这些数据关联起来
该方法主要是通过预指定好前因和后因的数据,然后将将这些数据关联起来
以上图为例,
- 首先,设计好关于 x ( l ) x^{(l)} x(l)的自由度 μ x ( x ) \mu_x(x) μx(x);
- 然后将时间序列映射到其中最大的自由度对应的值;
- 由此得到一个具有输入输出关系的规则了
以上图为例, x 1 → B 1 , x 2 → S 2 , x 3 → B 3 , x 4 → C E , . . . x_1\rightarrow B_1,x_2\rightarrow S_2,x_3\rightarrow B_3,x_4\rightarrow CE,... x1→B1,x2→S2,x3→B3,x4→CE,...
但是以上的WM方法也存在一个问题就是,对于大量的数据,可能产生相互矛盾的规则。
对于这样的现象,我们往往选择从中选择一个最大值的情况。
以上介绍了数据赋值方法和WM方法都属于One-pass方法,特点都是比较简单,可实现;但需要大量的参数和规则提前设定
接下来,我们的目标是构造一个FLS框架,利用数据来最优化参数并减少规则。
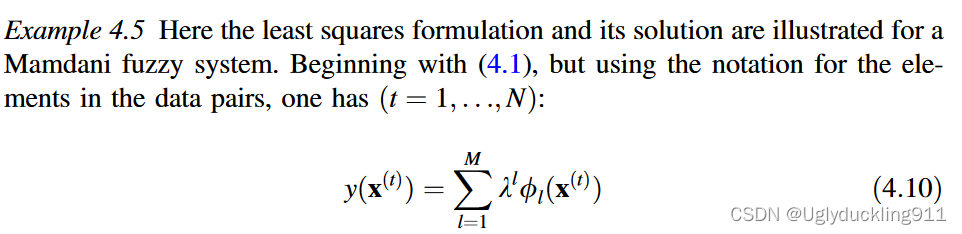
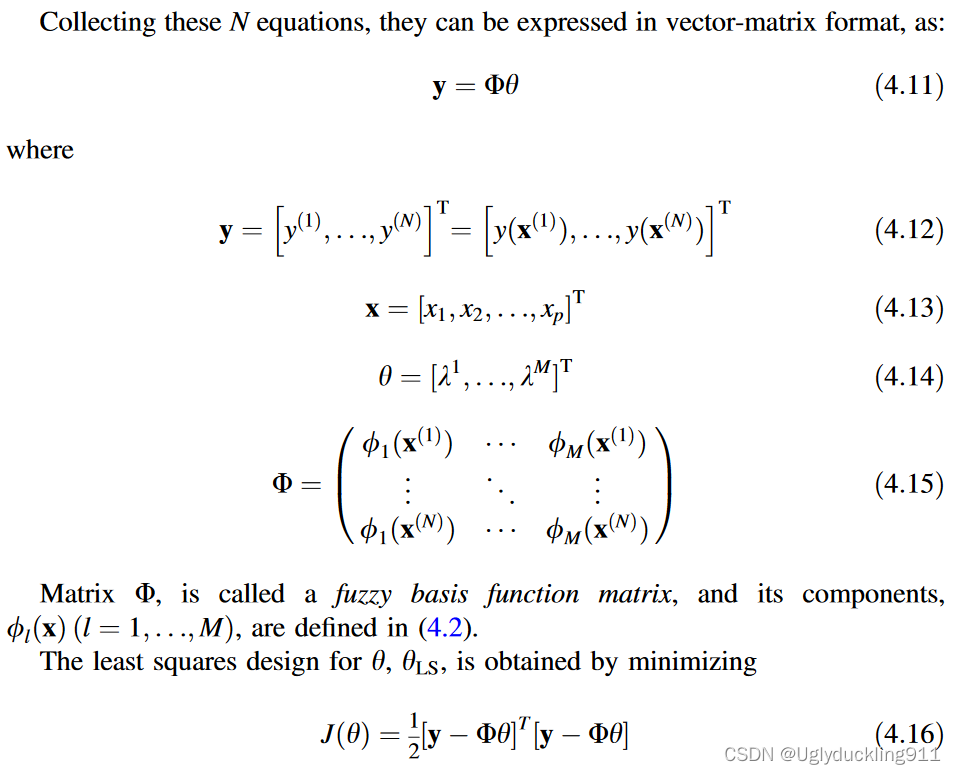
4.2.2 最小二乘法
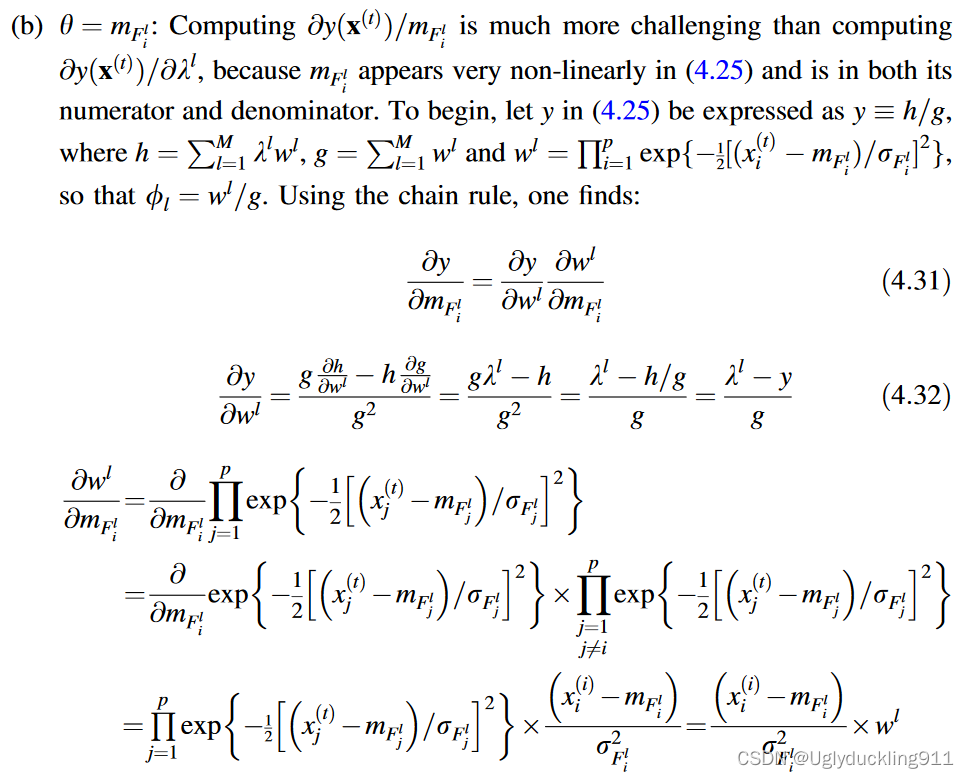
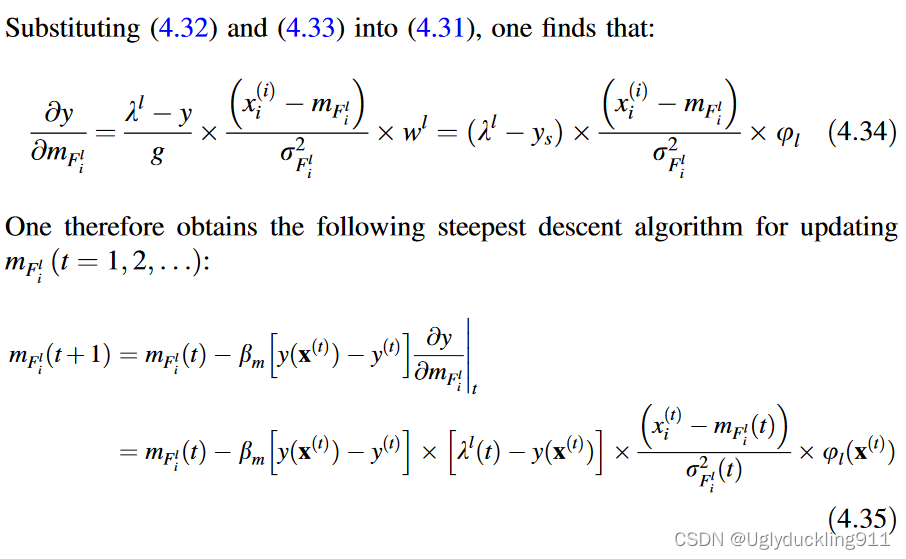
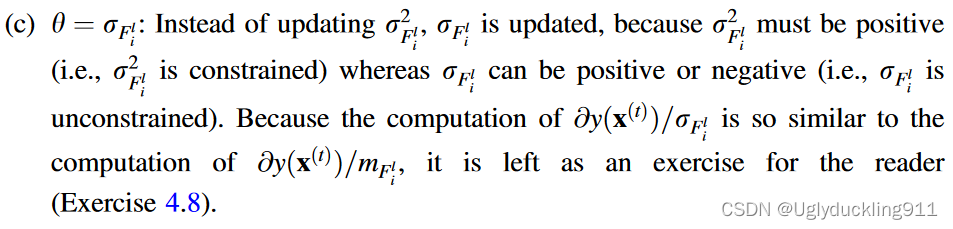
4.2.3 基于导数的方法
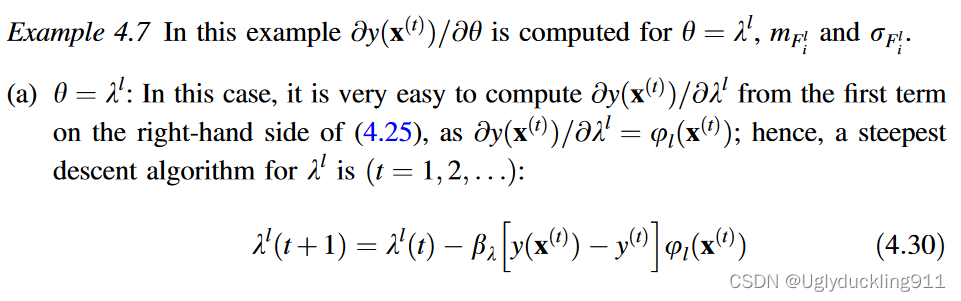
两种最流行和广泛使用的基于导数的优化算法是 steepest 下降和 Marquardt-Levenberg。使用它们时,不会提前固定任何前因或后因参数。这两种算法都需要关于每个 MF 参数的数学目标函数的一阶导数。在本节中,重点介绍单例 Mamdani 模糊系统和乘积 t 范数的最陡峭下降算法
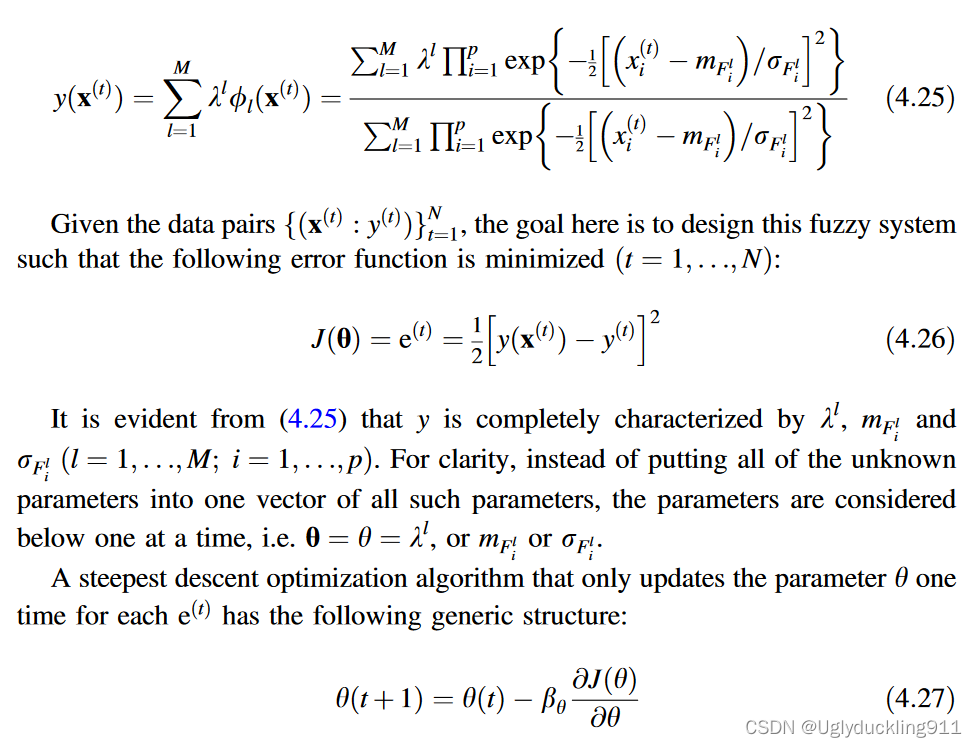
最速下降优化算法仅对每个
e
(
t
)
e^{(t)}
e(t)更新一次参数
θ
\theta
θ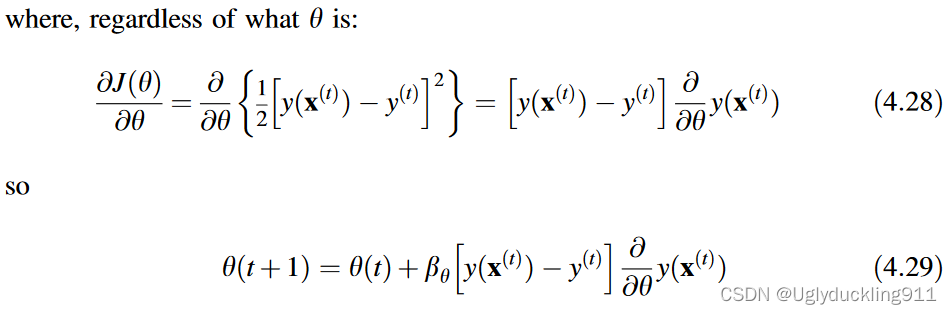
- 如果 MF 在其域上更改其数学公式(例如,三角形和梯形 MF 的情况),则导数公式也会更改,并且必须包括耗时的域测试。
- 他们倾向于只找到目标函数的局部极值而不是全局极值,也就是说,他们倾向于被困在局部极值。当然,有一些方法可以避免被困住,但是当使用衍生品时,有被困的倾向。
- 如何选择FBF的数量,M,是一个悬而未决的问题。下一个方法可用于解决此缺点。
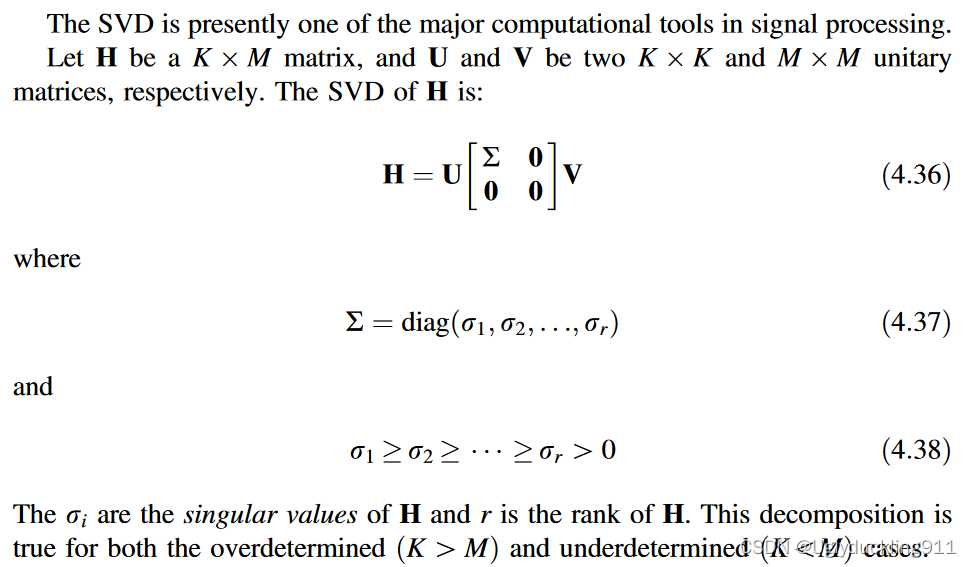
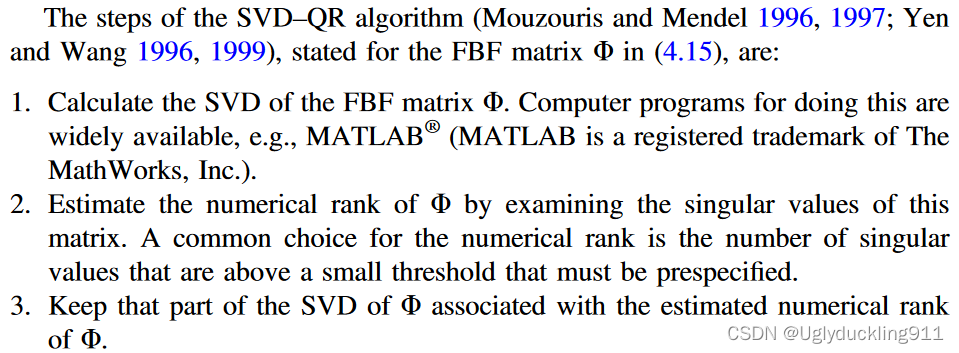
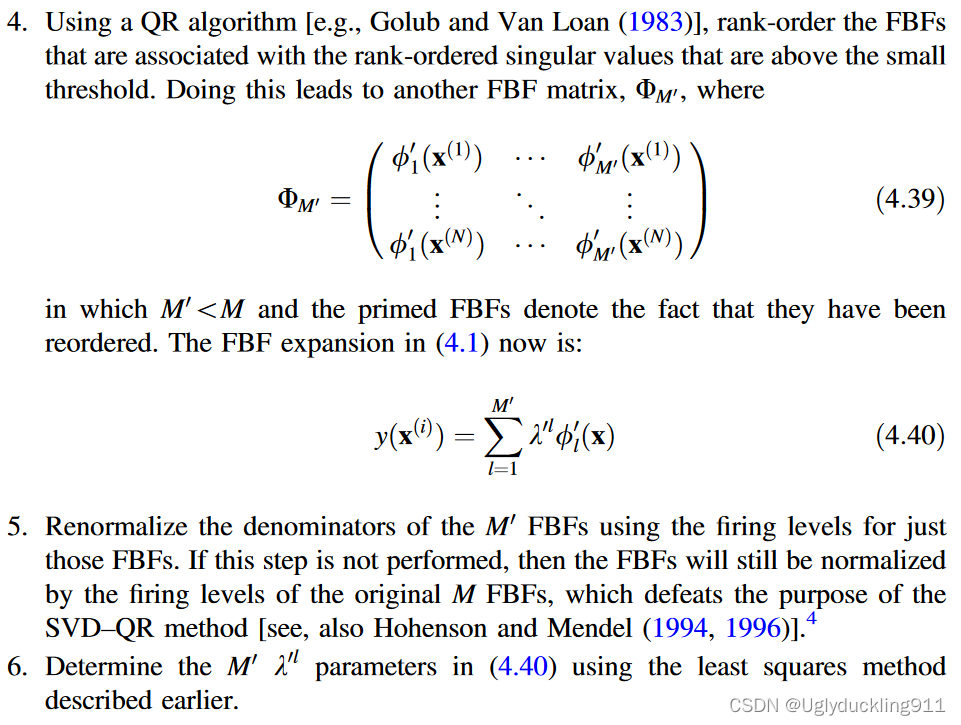
4.2.4 SVD-QR方法
对于模糊系统来说,规则分解可能是一个问题,而奇异值分解 (SVD) 是规则约简的一种方法。矩阵的 SVD 是数值线性代数中非常强大的工具。它的重要用途包括确定矩阵的秩和线性最小二乘问题的数值解。它可以应用于正方形或矩形矩阵,其元素要么是实数,要么是复数
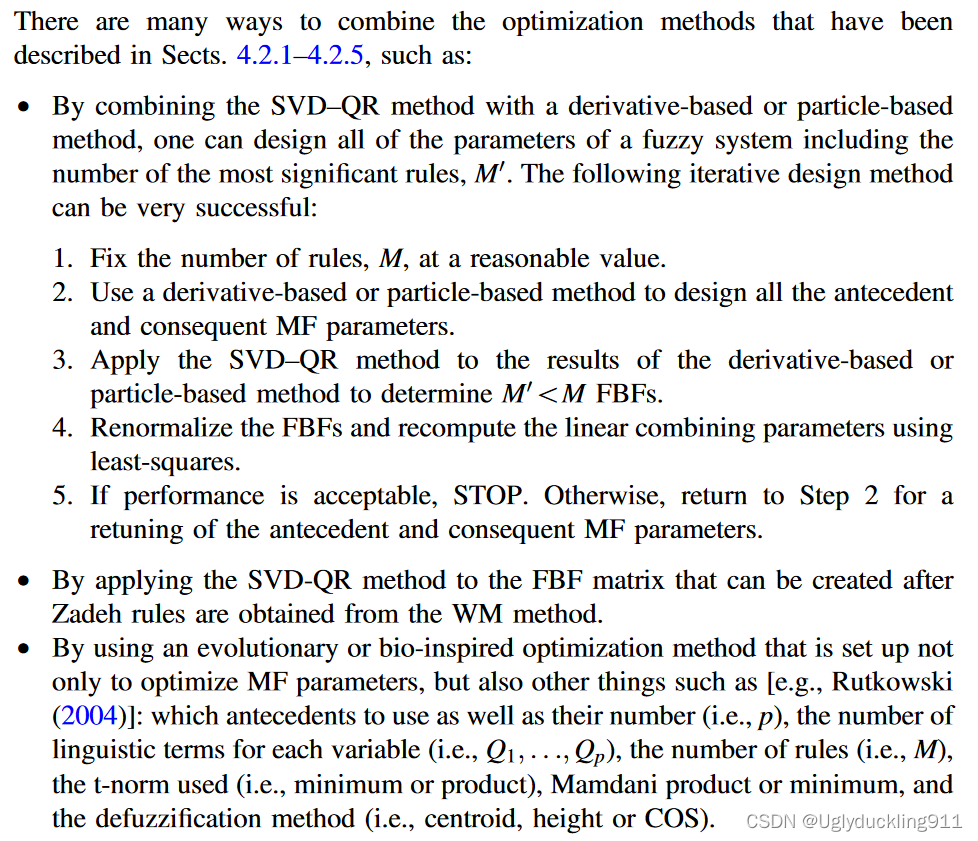
4.2.6 迭代法















 900
900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









