






 本文介绍了利用MATLAB进行船舶轨迹跟踪的控制方法,通过两轮差速小车模型,结合PID和LQR算法实现航向角和距离的精确控制。仿真结果验证了其有效性和稳定性,为船舶自主导航提供重要参考。
本文介绍了利用MATLAB进行船舶轨迹跟踪的控制方法,通过两轮差速小车模型,结合PID和LQR算法实现航向角和距离的精确控制。仿真结果验证了其有效性和稳定性,为船舶自主导航提供重要参考。
MATLAB路径规划仿真 轨迹规划,船舶轨迹跟踪控制,数学模型基于两轮差速的小车模型,用PID环节对航向角进行控制,迫使小车走向目标,或用PID环节对航向角和距离进行控制,迫使小车走向目标 LQR 算法
可自行小车起点坐标
ID:8849715316290429
南唐著名地椒糖
MATLAB路径规划仿真 在船舶轨迹跟踪控制中的应用
引言:
船舶轨迹跟踪控制是船舶自主导航中的重要研究方向,通过实时调整船舶航向角和距离,使船舶能够准确地达到目标位置。本文将介绍一种基于两轮差速的小车模型的数学模型,并使用PID环节和LQR算法进行轨迹规划和控制。通过MATLAB的路径规划仿真,展示了该方法的有效性和稳定性。
一、数学模型
船舶轨迹跟踪控制使用了基于两轮差速的小车模型。该模型考虑了船舶的航向角和距离,以控制船舶行进方向和距离。为了实现船舶的轨迹规划和控制,我们使用了PID环节和LQR算法。
二、PID环节对航向角的控制
PID环节是一种常用的控制算法,包括比例、积分和微分三个环节。在船舶轨迹跟踪控制中,我们使用PID环节对航向角进行调整,使船舶朝向目标位置。通过调整PID参数,可以实现对航向角的精确控制,使小车能够准确地走向目标。
三、PID环节对航向角和距离的控制
除了对航向角的控制,PID环节还可以同时对航向角和距离进行控制。通过调整PID参数,我们可以实现对船舶行进的方向和距离的同时调整,使小车能够更加准确地到达目标位置。
四、LQR算法
LQR(Linear Quadratic Regulator)算法是一种优化控制算法,可以根据系统模型和性能指标,求解最优的控制器。在船舶轨迹跟踪控制中,我们使用LQR算法对船舶的航向角和距离进行控制,以使船舶能够更加稳定地跟踪目标轨迹。
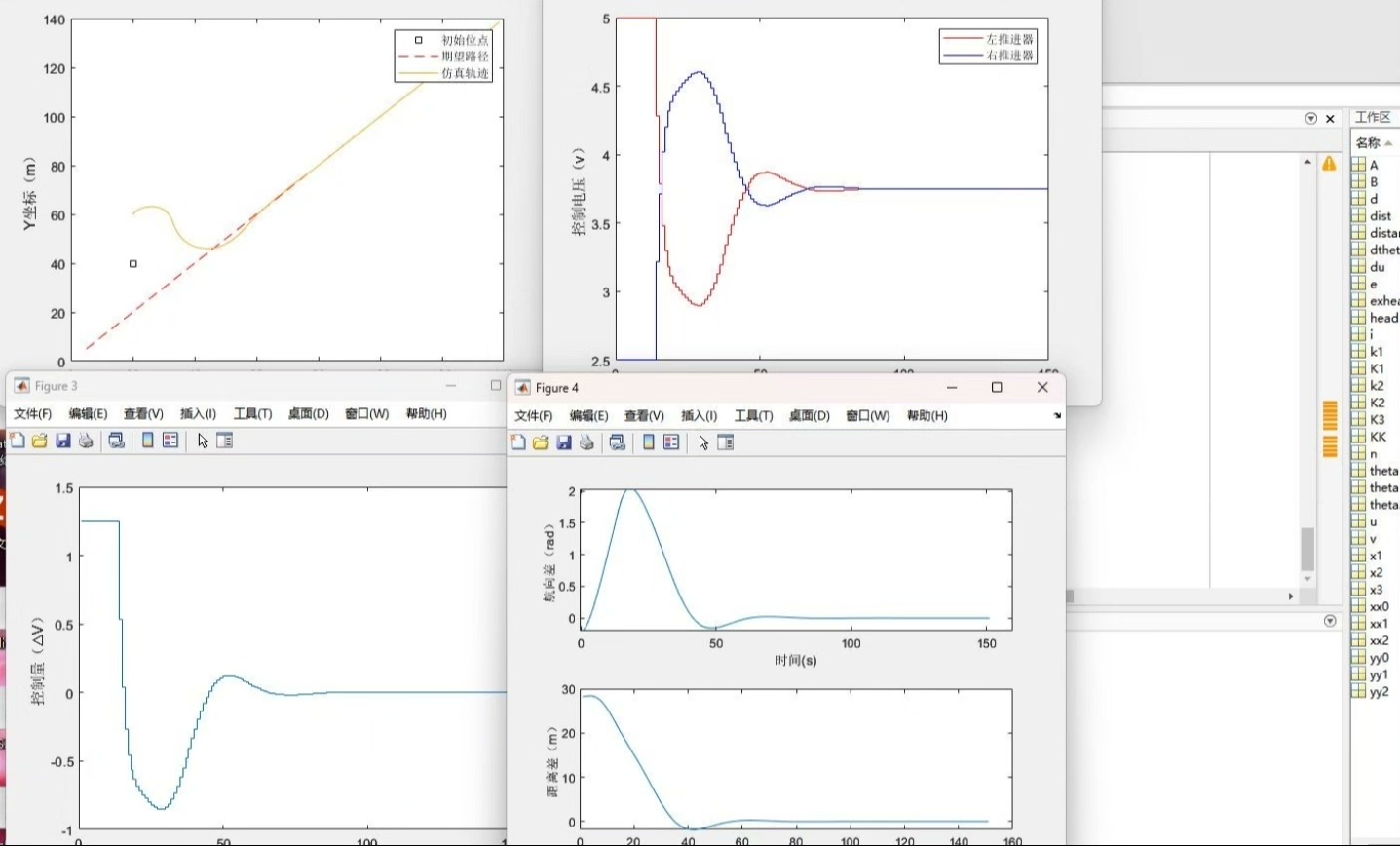
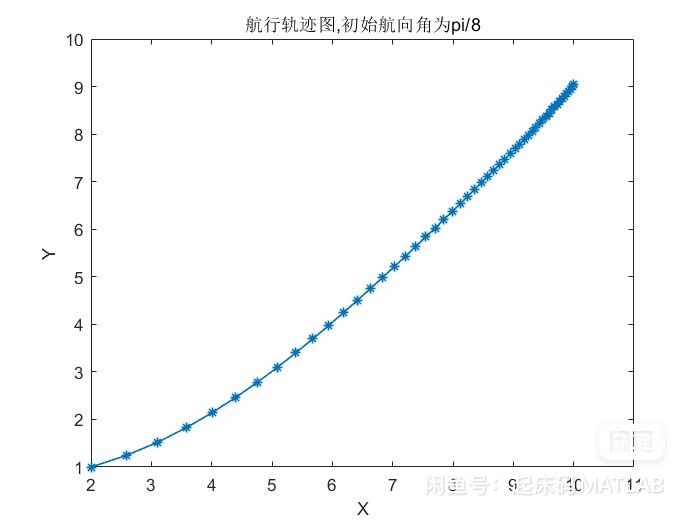
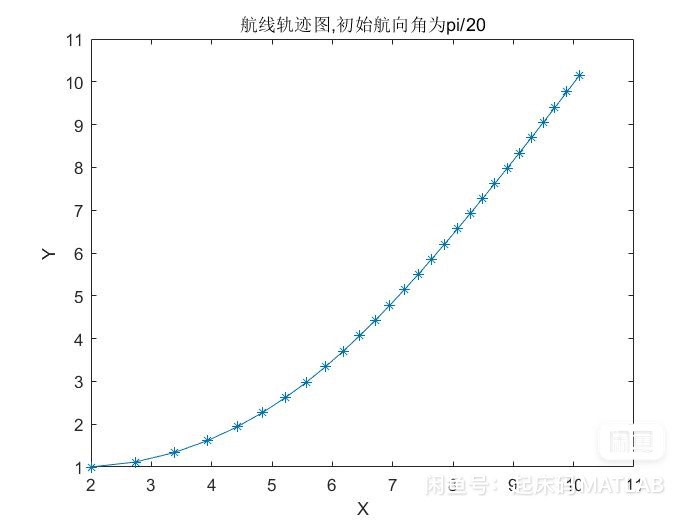
五、路径规划仿真
为了验证船舶轨迹跟踪控制算法的有效性,我们使用MATLAB进行了路径规划仿真。通过设定小车的起点坐标和目标位置,我们模拟了船舶的行进过程,并绘制了路径曲线和小车行进轨迹。仿真结果表明,该算法能够使小车准确地达到目标位置,并实现稳定的轨迹跟踪控制。
结论:
本文介绍了一种基于两轮差速的小车模型的船舶轨迹跟踪控制方法,并使用PID环节和LQR算法进行实现。通过MATLAB的路径规划仿真,展示了该方法的有效性和稳定性。该方法能够使船舶准确地达到目标位置,并实现稳定的轨迹跟踪控制。在实际船舶导航中,该方法有着广泛的应用前景,能够提高船舶自主导航的精度和安全性。
以上为本文的主要内容,介绍了船舶轨迹跟踪控制中基于两轮差速的小车模型的数学模型,并使用PID环节和LQR算法进行控制。通过MATLAB的路径规划仿真,验证了该方法的有效性和稳定性。本文的研究成果为船舶自主导航领域的研究提供了重要参考,有着广泛的应用前景。
(文章内容仅供参考,具体实施细节和数据需根据实际情况进行调整和验证)
以上相关代码,程序地址:http://wekup.cn/715316290429.html















 197
197

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









