







摘要: 光场相机是一种在图像传感器前增加微透镜阵列的新型相机结构,除了记录不同位置下光的强度及颜色外,也记录不同位置下光线的方向信息,从而能够计算目标场景的深度图和高阶相位图。该技术由于景深和分辨率相互制约,获得大景深时分辨率会降低。分析了其结构特点并推导了景深和分辨率的关系,并就选定的设计参数绘制了变化曲线。在此基础上,提出了一种新型光场相机的设计方法,该结构基于具有四类焦距的微透镜阵列,可获得超大景深,同时将分辨率的下降程度控制在可接受范围。仿真结果表明:相对于三类焦距微透镜阵列,所设计的四类焦距微透镜阵列景深可提高三倍,而分辨率达到普通相机的18.9%。
关键词: 光场相机;景深;有效分辨率比率;多焦距;微透镜阵列
0 引言
在新型成像技术领域,基于光场相机的计算成像将日新月异的计算能力和逐渐成熟的微阵列光学结构加工能力结合在一起,形成了全新的光场重建方式,成为近年来的研究热点。根据光场理论,如果能够获取物点在不同方向上的强度分布就能准确解算出全视场的深度图谱,而光场相机通过在传统相机的主透镜和图像传感器之间加装微透镜阵列(MicrolensArray,MLA),实现了这一目标[1]。
光场相机可分为非聚焦型和聚焦型两种:第一种非聚焦结构微透镜阵列位于主透镜的焦面,原则上景深无限大,但是成像分辨率很低,仅仅等于微透镜数目,这是其重要缺陷;第二种聚焦型结构成像元件离开焦平面一定距离,等效于对主镜头的成像进行二次分孔径成像,分辨率大大提高,但是付出的代价是景深急剧缩短,依旧无法摆脱分辨率和景深之间的相互制约。
文中详细分析了光场相机景深与分辨率之间的关系,在此基础上提出了一种四焦距微透镜阵列的聚焦型光场相机,基于不同深度为目标光场匹配不同焦距类型的微透镜阵列,使四段景深衔接,极大地扩展了系统的景深范围,达到三焦距微透镜阵列的光场相机景深的6倍,同时控制成像区域完全覆盖视场区域,使分辨率仅下降到普通相机的18.9%,一定程度上解决了光场相机的技术瓶颈。
1 背景
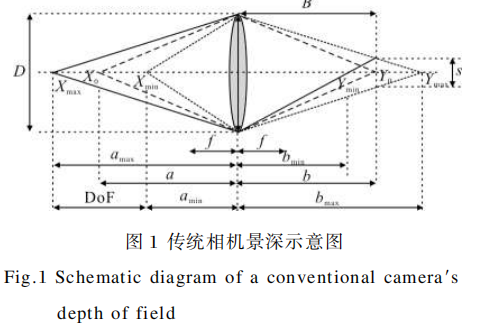
1.1传统相机
在介绍光场相机的景深之前,首先分析一下传统相机的景深。
如图1所示,理想情况下透镜左方X0点发出的所有光线经过透镜后都将汇聚到透镜右方Y0处,它们之间的关系由薄透镜方程表示[2]:

式中:f为透镜焦距。如果在距离透镜B的Y0处放置传感器,那么在光轴上比X0近或远的点发出的所有光线经过透镜后将在传感器上呈扩散圆,这意味着为了确保图像的锐利程度,使图像看起来清晰,传统相机只能将物空间一定深度范围最佳成像到像空间。这一深度范围称之为景深(Depth of Field,DoF)。
实际上由于衍射效应的作用,点光源经过透镜后并不能汇聚到一个点,而是具有一定的强度分布,称之为艾里斑[3]。描述其大小的一个近似公式是:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2215
2215

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









