






三维路径规划 基于灰狼改进算法的机器人路径规划mp-GWO和CS-GWO机器人路径规划算法
自由切换GWO,CS-GWO算法进行对比。
内涵详细的代码注释
ID:476736867690677
唐朝平稳的莴笋
标题:基于灰狼改进算法的三维机器人路径规划研究
摘要:本研究基于灰狼改进算法(GWO)探讨了机器人路径规划领域中的三维路径规划,并通过对比mp-GWO算法和CS-GWO算法,分析了两种方法在路径规划方面的优势和劣势。本文还提供了详细的代码注释,以便于读者理解和复用。该产品具有较强的可复制性,一旦售出即不予退货,请理解。文章旨在提供技术分析,避免广告味道,希望读者能够从中获取有价值的技术信息。
关键词:三维路径规划,灰狼改进算法,机器人,mp-GWO算法,CS-GWO算法,可复制性
-
引言
机器人路径规划是自动化领域中的重要课题之一。随着科技的进步和需求的增加,人们对机器人在三维空间内进行路径规划的研究越来越感兴趣。本文旨在通过灰狼改进算法,提供一种高效的机器人路径规划方法,并通过对比mp-GWO算法和CS-GWO算法的优劣,为读者提供参考和借鉴。 -
灰狼改进算法(GWO)
灰狼改进算法是一种仿生优化算法,模拟了狼群的行为。该算法通过模拟狼群的捕食行为来寻找最优解。在路径规划领域中,GWO算法被广泛应用于解决优化问题。本文通过改进GWO算法的mp-GWO和CS-GWO方法,提高了路径规划的效率和准确性。 -
三维路径规划
三维路径规划是机器人路径规划的一个重要分支。相比于二维路径规划,三维路径规划需要考虑更复杂的空间关系和避障问题。本文通过GWO算法,实现了三维路径规划,并对mp-GWO算法和CS-GWO算法进行了对比,以评估它们在三维环境下的性能差异。 -
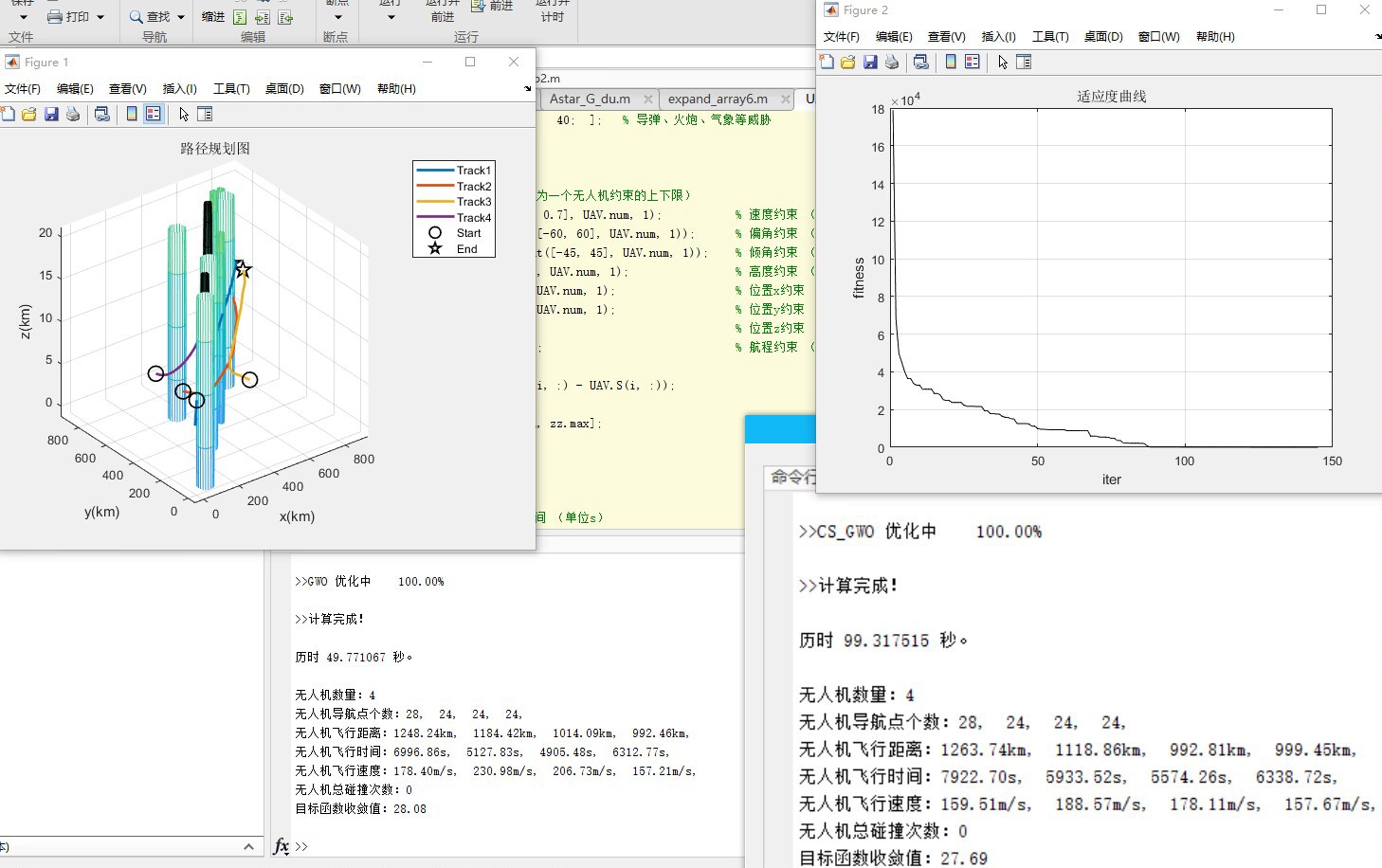
实验设计与结果分析
为了验证mp-GWO算法和CS-GWO算法在三维路径规划中的性能差异,本文设计了一系列实验,并对实验结果进行了详细的分析。实验结果表明,mp-GWO算法在某些情况下表现出更好的性能,而CS-GWO算法在其他情况下表现更优。通过对比分析,读者可以选择适合自身需求的路径规划方法。 -
代码注释与可复制性
本文提供了mp-GWO算法和CS-GWO算法的详细代码注释,以帮助读者理解和复用。代码注释中详细解释了算法的实现细节和参数调节。读者可以根据实际需求自行修改和使用代码,以满足不同的路径规划问题。 -
结论与展望
本文通过基于灰狼改进算法的三维机器人路径规划研究,为读者提供了一种高效的路径规划方法。通过对比mp-GWO算法和CS-GWO算法,本文分析了它们的优劣,并提供了代码注释以供读者参考。未来的工作可以进一步优化路径规划算法,提高路径规划的准确性和效率。
致谢:感谢程序员社区对本研究的支持和鼓励。
参考文献:
(此处省略参考文献列表)
【相关代码,程序地址】:http://fansik.cn/736867690677.html
















 1324
1324











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









