






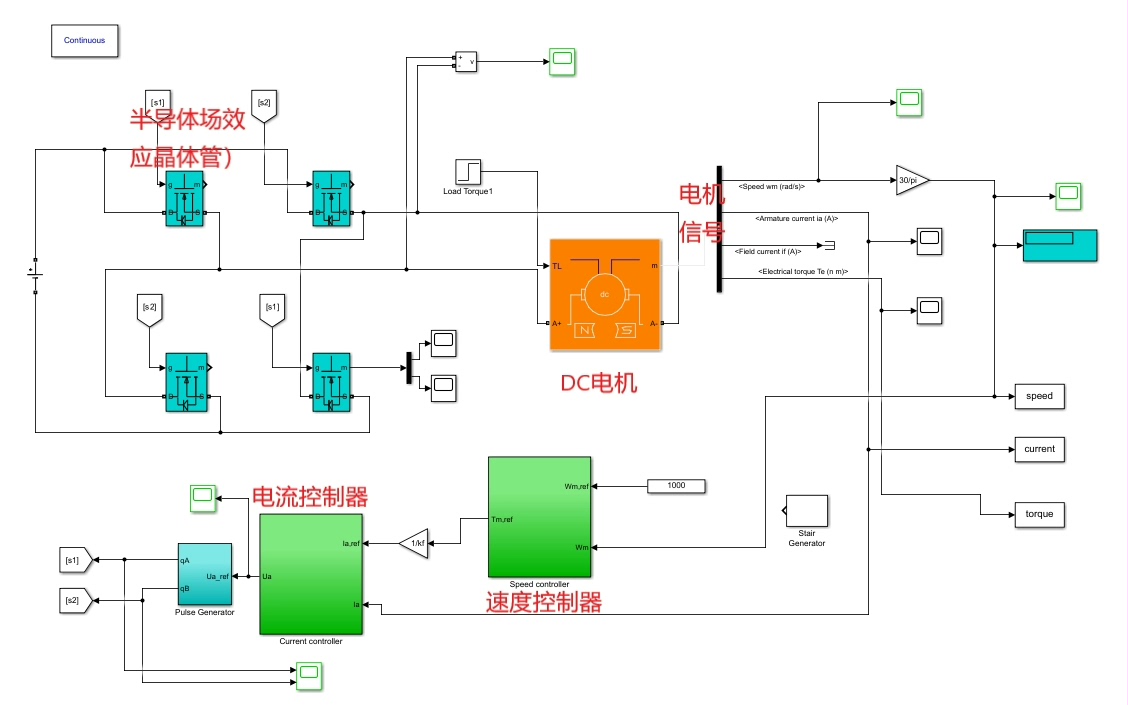
四象限直流电机速度驱动控制系统仿真模型
永磁直流电机(PMDC)转速控制模型
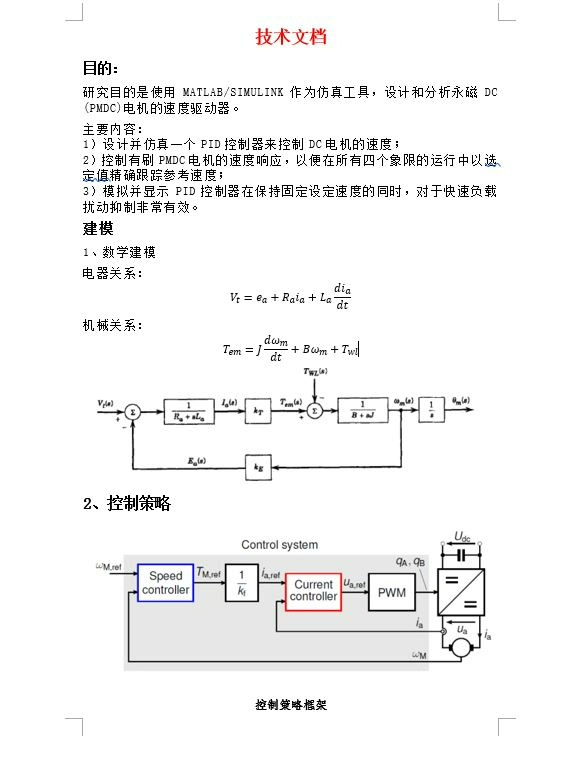
1)设计PID控制器来控制DC电机的转速;
2)控制有刷PMDC电机的速度响应,以便在所有四个象限的运行中以选定值精确跟踪参考速度;
3)模拟并显示PID控制器在保持固定设定速度的同时,对于快速负载扰动抑制非常有效。
本文件除了Simulink模型,还包括word模型说明文档以及参考文献。
ID:94144714702078741
灵犀Mr_p
四象限直流电机的速度驱动控制是现代工业中非常重要的一个技术领域。直流电机是一种常见的电动机,其在工业、交通以及家用电器等领域中应用广泛。本文将围绕四象限直流电机速度驱动控制系统的仿真模型展开讨论。
在四象限直流电机速度驱动控制系统中,PID控制器是一种常见的控制器。PID控制器由比例(P)、积分(I)和微分(D)三个部分组成,其作用是根据实际速度与目标速度之间的差异来调整电机的输入信号。PID控制器的设计是实现四象限直流电机精确跟踪参考速度的关键。
有刷永磁直流电机是一种常见的直流电机类型,其具有较低的成本和较高的效率。在控制有刷永磁直流电机的速度响应时,需要确保在四个象限的运行中都能以选定值精确跟踪参考速度。通过模拟和显示PID控制器在固定设定速度的同时对于快速负载扰动的抑制非常有效,可以进一步改善系统的稳定性和性能。
本文所提供的仿真模型使用Simulink工具进行建模。Simulink是一款强大的工程仿真软件,可以用于建立各种系统的数学模型并进行仿真分析。除了Simulink模型,本文还包括word模型说明文档以及参考文献,旨在提供完整的技术分析和实现方法。
通过本文所提供的仿真模型,可以实现对四象限直流电机速度驱动控制系统的模拟。该模型利用PID控制器对电机的转速进行控制,以确保其精确跟踪参考速度。同时,该模型还考虑了快速负载扰动对系统稳定性的影响,并通过PID控制器对其进行抑制。
总之,本文围绕四象限直流电机速度驱动控制系统的仿真模型展开了讨论。通过PID控制器的设计和应用,可以实现对有刷永磁直流电机速度响应的精确控制。该模型在保持固定设定速度的同时,对于快速负载扰动的抑制非常有效。通过Simulink工具进行建模和仿真,可以进一步验证该系统的性能和稳定性。本文提供的仿真模型、说明文档和参考文献将有助于读者深入理解四象限直流电机速度驱动控制系统的设计和实现方法。
【相关代码,程序地址】:http://fansik.cn/714702078741.html


















 7923
7923

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









