






Trajectory Online Adaption Based on Human Motion Prediction for Teleoperation
基于人体运动预测的遥操作轨迹在线自适应(TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING 2022)
Abstract
本文提出了一种基于自回归(AR)模型的遥操作人体运动意图预测方法。
基于该方法,通过更新AR模型的参数,可以实时更新机器人的运动轨迹。在遥操作机器人的控制回路中,定义了虚拟力模型来描述交互轮廓并实时校正机器人的运动轨迹。
在 HRI 过程中,所提出的人体运动预测算法作为前馈模型来更新机器人的运动并修正该运动。
Introduction
列出提高遥操作性能:结合人类感知和机器人能力完成任务;视觉和手动控制算法提升适用性;肌电图改善 HRI;生态界面和混合主动触觉增强遥操作性能;心理物理信号和运动学习的触觉反馈;动作识别和辅助单元提升性能;辅助控制简化远程操作。
由于遥操作机器人代表了典型的人在回路系统,人的意图可能会影响遥操作的性能。
提出要点:如何利用人类的意图来提高遥操作的性能是至关重要的。
已有相关应用:意图识别框架通过交换触觉协作;具有力反馈的触觉意图增强;人机控制框架,以实现遥控轮椅系统的安全和顺从;共享控制算法被广泛用于识别人类对遥控系统的意图;演示编程编码人类运动。
已有相关方案:人体运动预测可以提高遥操作质量和性能;基于上下文信息和共享自主性的轨迹预测算法推断人体轨迹;一种虚拟现实方法(隐马尔可夫模型和K-means聚类)预测人类操作。卡尔曼滤波实时预测人体运动,应用遥操作的触觉设备。
已有相关方案问题:这些方法在遥操作中使用的是人体运动轮廓,而不是力信息。
提出解决方案:一种新的基于自回归(AR)模型的预测方法来估计遥控系统的人体运动意图。更新AR 的参数在线适应人体运动预测,提出了一个虚拟力模型来调整预测的运动意图。
Problem formulation and preliminaries
A. 问题的提出
在遥控系统中,人握住触觉设备控制从机器人。触觉设备和人之间相互作用,人施加力
f
h
f_{h}
fh 是系统的输入;因此,人使用触觉设备的动态可以被定义为:
(1)
M
m
M_{m}
Mm和
C
m
C_{m}
Cm分别是触觉装置的惯性矩阵和科里奥利离心矩阵;
G
m
G_{m}
Gm表示重力矩阵;
x
d
x_{d}
xd表示交互过程中的位置;
u
m
u_{m}
um表示触觉装置的控制输入。
阻抗控制通常用于HRI,这可以通过设计如下控制输入来实现:
(2)
M
m
d
M_{md}
Mmd表示触觉装置的期望惯性矩阵,
D
m
d
D_{md}
Dmd和
K
m
d
K_{md}
Kmd分别是触觉装置的期望阻尼和刚度矩阵,
x
m
x_{m}
xm表示触觉装置的参考轨迹。
基于(1)和(2)触觉装置的阻抗模型:

设置
x
m
x_{m}
xm= 0 和
K
m
d
K_{md}
Kmd= 0,触觉设备被动地跟随人运动。在这种情况下,触觉设备不能主动地与人合作,需要人力来补偿触觉设备的动态,从下面的等式中观察到:

正确的
K
m
d
≠
0
K_{md}\ne0
Kmd=0 和
x
m
x_{m}
xm,则触觉设备可以主动移动到
x
m
x_{m}
xm
本文:对人类运动意图的预测来设计触觉设备的参考运动
B. 准备工作
(1)遥操作系统的动力学模型
主侧 在关节空间的动力学可以表示为:

q
m
q_{m}
qm 表示关节角度,
M
m
M_{m}
Mm、
C
m
C_{m}
Cm、
G
m
(
q
m
)
G_{m}(qm)
Gm(qm) 分别是惯性矩阵、科里奥利向心矩阵和重力矩阵,
M
m
(
q
m
)
M_{m}(q_{m})
Mm(qm) 是一个对称的正定矩阵,
F
m
(
t
)
F_{m}(t)
Fm(t) 表示扰动,
F
h
(
t
)
F_{h}(t)
Fh(t) 是人施加的力,
J
m
J_{m}
Jm 是雅可比矩阵,
τ
m
\tau_{m}
τm 表示主机控制输入。
从侧 动态模型可以描述为:

G
s
(
q
s
)
G_{s}(q_{s})
Gs(qs) 是引力矩阵。
F
s
(
t
)
F_{s}(t)
Fs(t) 是从机的扰动,
τ
s
\tau_{s}
τs 是从机控制输入。
F
e
(
t
)
F_{e}(t)
Fe(t) 表示环境和从机器人之间的相互作用力。
遥操作系统[36]有四个属性,将用于控制器设计(原文推导)。
(2)自回归模型
人体运动可以使用时间序列模型来描述[37];时间序列可以用AR模型描述为:
(3)
ϕ
0
,
ϕ
1
.
.
.
.
,
ϕ
p
\phi_{0},\phi_{1}....,\phi_{p}
ϕ0,ϕ1....,ϕp是需要确定的参数,
e
t
e_{t}
et表示均值为0,方差为
σ
\sigma
σ 的白噪声。
(3)以状态空间的形式为:
V
t
=
0
V_{t}=0
Vt=0 
此AR方法可以通过使用Yule-Walker方程来求解。
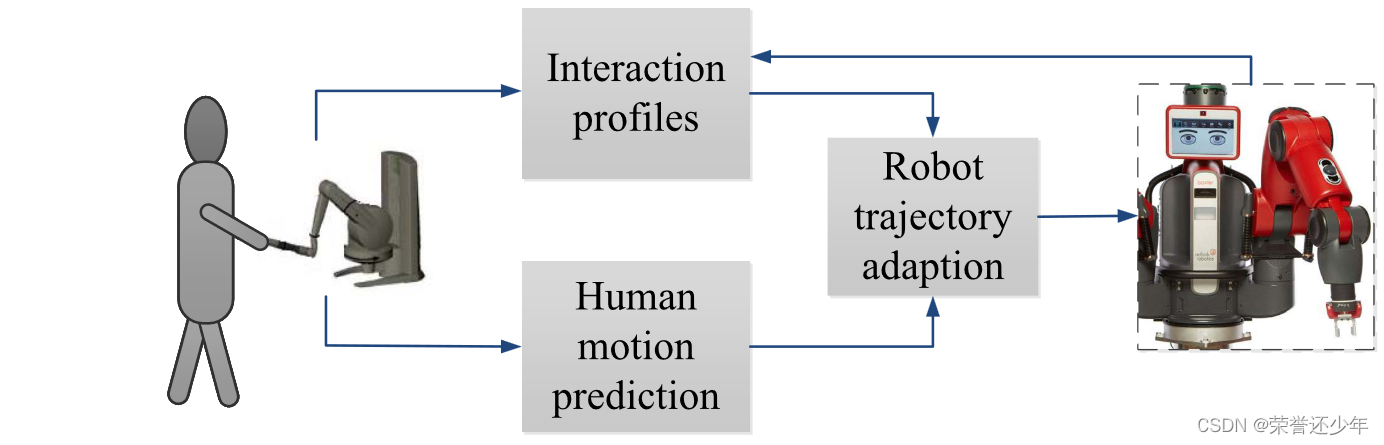
Method
机器人轨迹是基于人体运动预测来调整的,人体运动预测利用了机器人和人体之间的交互轮廓。人体运动预测与机器人轨迹自适应关系示意图:
A. 人体预测模型
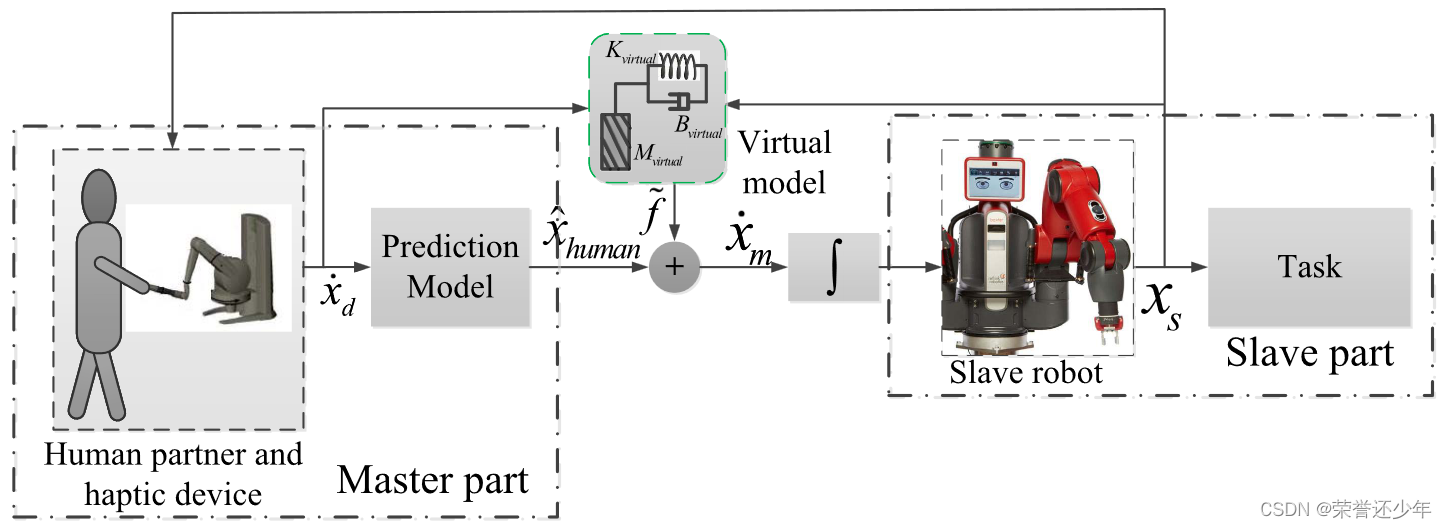
遥控操作系统的方法的框架,其中分为两部分:主部分和从部分。
在主侧,人类伙伴移动触觉设备,其位置基于所提出的预测模型来预测。预测位置作为从动机器人的参考位置,从动机器人的实际位置反馈给主侧进行闭环。
假设人手部运动是一个连续的轨迹,定义如下:
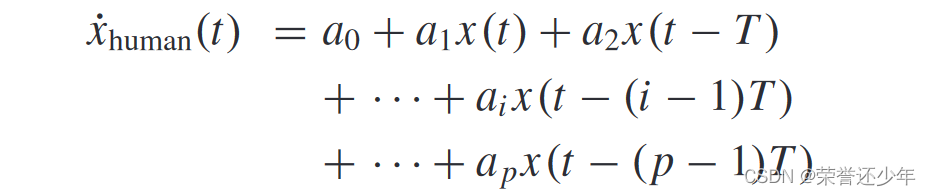
T表示时间步长
i
=
0
,
1
,
2
,
.
.
.
,
p
i=0,1,2,...,p
i=0,1,2,...,p 表示权重,p的值由人手运动的类型决定,
x
(
t
−
i
T
)
x(t-iT)
x(t−iT) 表示第
i
i
i 个时间步长信息。以上可改写为:


可以近似,获得 


A
ˉ
\bar{A}
Aˉ 表示估计值,
α
1
\alpha_{1}
α1 表示正标量。
为了准确捕捉人手的运动意图,提出了一种更新律:

触觉设备的参考轨迹可以定义如下:

B. 虚拟力模型
交互力是由触觉设备和从机器人之间的运动跟踪误差产生的虚拟力。
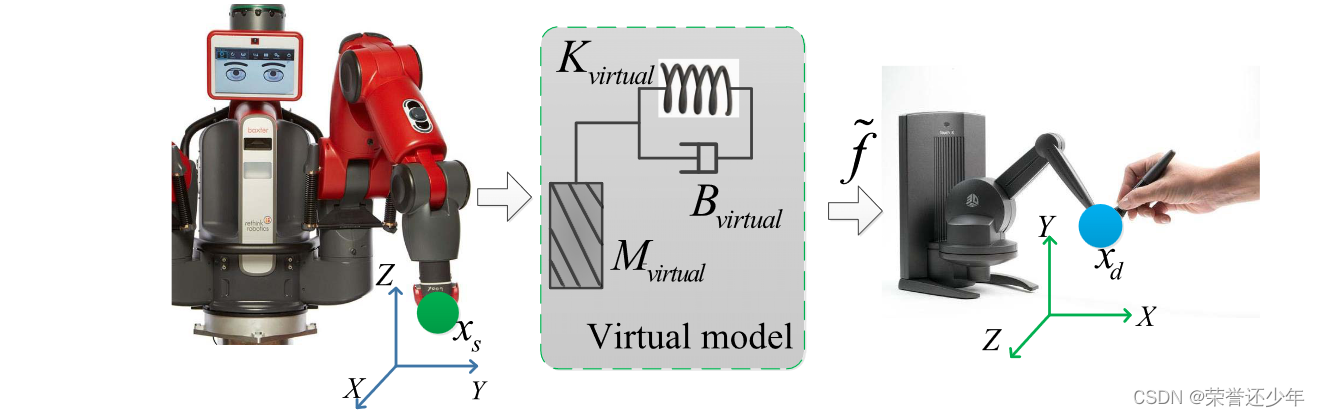
虚拟力可以使用如下导纳模型来表示:

虚拟力在遥操作系统和人类交互过程中提供触觉反馈。人手模型可以表示为:

K
h
u
m
a
n
K_{human}
Khuman 是人的控制增益,
x
h
u
m
a
n
x_{human}
xhuman 对于触觉设备来说是未知的。在远程操作系统中,人类施加的力是系统的输入,因此触觉设备的系统可以写成如下形式:
















 611
611

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









