






Effects of Shared Control on Cognitive Load and Trust in Teleoperated Trajectory Tracking
遥控轨迹跟踪中共享控制对认知负荷和信任的影响(RAL 2024)
Abstract
为设计机器人控制器帮助人类执行挑战性任务,机器人的自主行为和操作员的内部状态之间的相互作用是必须的。
本文研究机器人自主性与人类用户的认知负荷和信任水平之间的关系,以及在机器人辅助执行任务中三方交互的潜在存在。
强调了在共享控制设置中改变机器人自主水平时,需要将认知负荷和信任作为不同但相关联的因素来考虑。
Introduction
人机交互(HRI)旨在结合人类和机器人各自的优势,以实现预期的任务结果。
HRI期间最好地配置机器人自主性,使得它提高性能而不被其用户负面感知是一个公开的问题。
提出问题:用户的认知负荷和信任如何随机器人自主水平的变化而变化?
验证方案:使用共享控制方案进行了一项遥操作研究,该方案允许改变机器人的自主水平。此研究使用轨迹跟踪任务来最小化混杂变量的影响,同时为了解机器人自主性对人类认知负荷和信任的影响提供了基础。提出了三个主要假设:
H1-参与者的认知负荷随着机器人自主性的提高而降低;
H2-参与者对机器人的信任随着机器人自主性的提高而提高;
H3-信任与认知负荷之间存在自主性依赖关系
Related Works
完成复杂任务通常需要机器人和人类的智能,遥操作通常利用共享控制[5],其中人类和机器人自主控制器的命令输入被集成和决策,以确定机器人的最终动作。现有的共享控制方法主要集中在任务性能 / 交互的物理特征上,例如人 / 机器人的努力。这些交互度量通常也是特定于任务的。
机器人的自主性和行为也会影响用户的认知负荷]和信任。认知负荷是任务复杂性的一个指标:
低频率下进行:主观评估方案(例如,主观工作负荷评估技术(SWAT),脑力劳动等级量表(RSME),任务负荷指数(NASA-TLX))可靠地捕捉工作负荷。
高频率下进行:生理测量(例如,瞳孔放大、心脏活动、大脑活动)同时执行次要任务(例如,再现旋律、执行简单数学、对刺激做出反应)的双任务范式测量认知负荷,但受到混杂因素的影响。
现有工作:分别研究了自主性对用户认知负荷和信任的影响。
提出问题:认知负荷和信任是否基于它们之间潜在的依赖性而变化。
创新点:目前还没有关于机器人自主性、认知负荷和信任之间三方关系的研究。由此研究,机器人学家可以更好地设计具有不同自主水平的自适应机器人,根据用户调整他们的行为。
Method
本研究评估了参与者在遥操作(Franka Emika Research 3)机械臂期间的 认知负荷 和 信任度。
轨迹跟踪能够在混合控制中使用明确定义的机器人自主级别(B中);
并通过均方根误差(RMSE)指标(D中)对任务性能有明确的指标;
还采用了一种双重任务方法来测量认知负荷,并辅以一个节律性敲击任务。
A. User Interface 用户界面
用户界面旨在复制真实遥操作场景,其中参与者在独特环境操作,不直接感知真实物理机器人。
相反,本文使用Rviz展示机器人实时状态的虚拟渲染和其周围环境的预捕获点云。
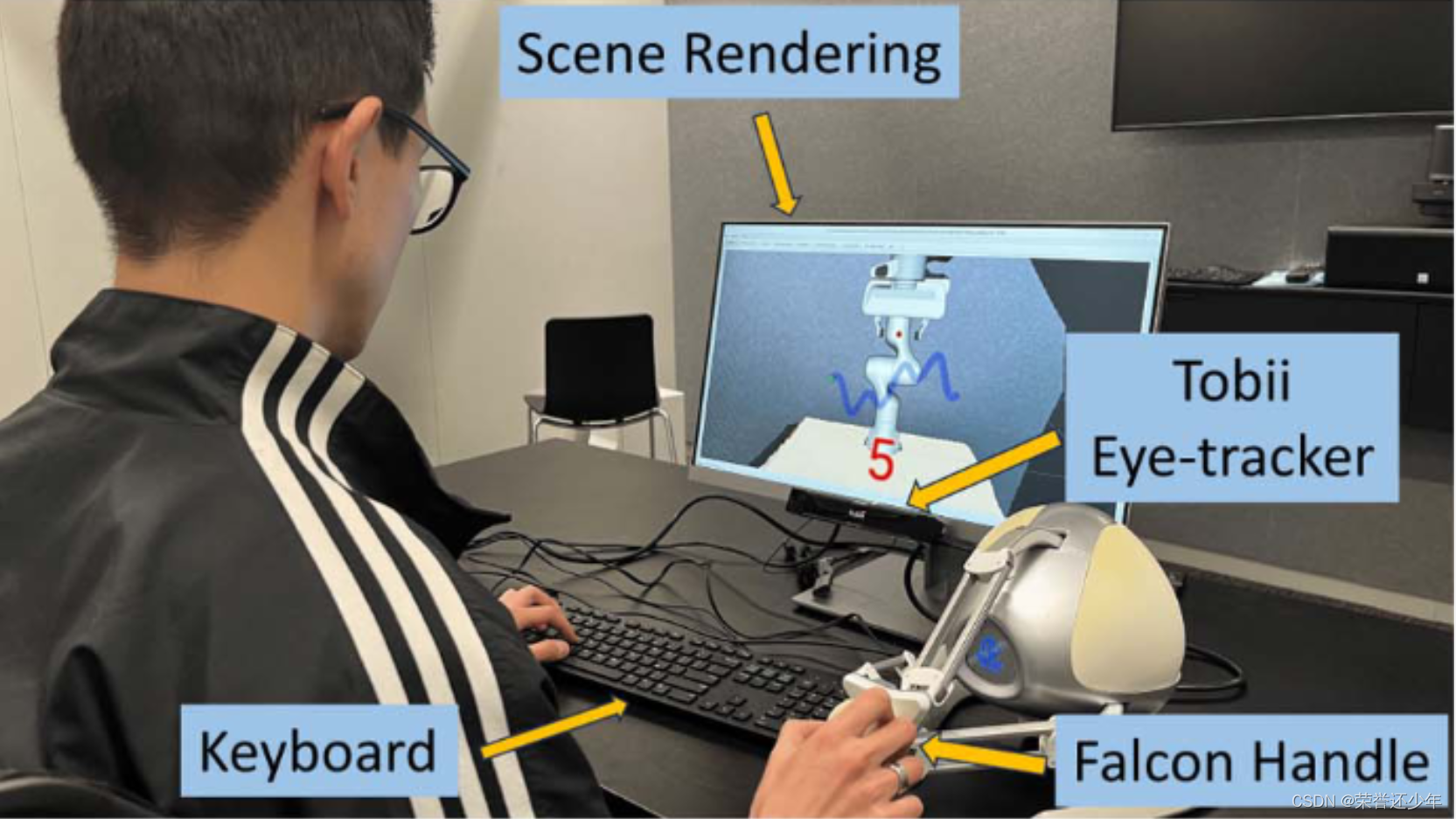
遥操作通过Novint Falcon触觉控制器的手柄进行的,该控制器连接相邻房间的机器人。没有向参与者提供触觉反馈。参与者通过按电脑键盘上的“空格键”来执行二次敲击任务。
B. Primary Task 主要任务
参与者使用机器人的末端执行器遥控机器人跟踪T=10 s持续时间的轨迹。参与者被要求“尽可能准确地”跟随
t
∈
[
0
,
t
]
t∈[0,t]
t∈[0,t] 的三维时间参数化轨迹:
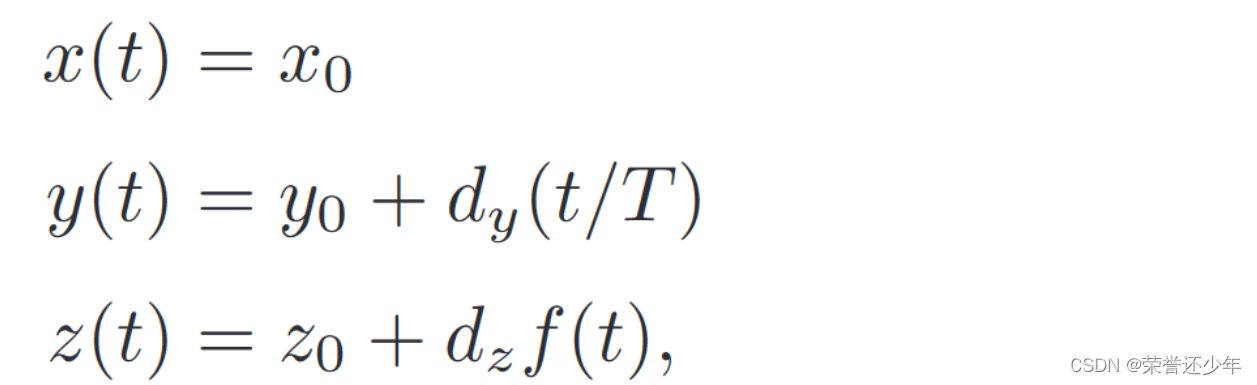

是一个多正弦曲线。使用公式及参数
(
a
1
,
a
2
,
a
3
,
θ
)
(a1, a2, a3, θ)
(a1,a2,a3,θ),我们生成了一组轨迹
S
=
(
2
,
3
,
4
,
4
π
/
3
)
,
(
1
,
3
,
4
,
π
)
,
(
2
,
2
,
5
,
π
)
,
(
2
,
3
,
5
,
8
π
/
5
)
,
(
2
,
4
,
5
,
π
)
S = {(2, 3, 4, 4π/3), (1, 3, 4, π), (2, 2, 5, π), (2, 3, 5, 8π/5), (2, 4, 5, π)}
S=(2,3,4,4π/3),(1,3,4,π),(2,2,5,π),(2,3,5,8π/5),(2,4,5,π)。这些不同的轨迹被用来在多次重复过程中降低记忆的可能性。参数选择具有相似的振幅和频率,以确保类似的跟踪复杂性。
机器人通过人类和它自己的自主控制器之间的共享控制来指挥。这采用了混合控制(或凸组合)公式,其中输入位置被计算为:

u
r
∈
R
3
u_{r}∈R3
ur∈R3 表示对应于当时轨迹值的参考机器人末端执行器位置输入;
并且
u
h
∈
R
3
u_{h}∈R3
uh∈R3 表示来自人类输入的参考末端执行器位置——由手柄位置3倍映射;
标量
γ
γ
γ 表示机器人自主的水平,其中
γ
=
1
γ=1
γ=1 对应于完全机器人控制(完全自主),
γ
=
0
γ=0
γ=0 对应于完全人类控制(没有自主)。
通过改变
γ
γ
γ,人和机器人之间的相对自主性发生了变化。得到的输入
u
∈
R
3
u∈R3
u∈R3 在ROS中被传递到运动学和动力学库(Orocos)逆运动学解算器,以计算关节位置,然后由机器人以500 Hz运行的关节控制器跟踪。
C. Secondary Task 次要任务
“节奏法”:参与者在执行主要任务的同时,从记忆中敲击预先录制的节奏。与轨迹设计类似,最大限度地减少参与者在多轮比赛中学习节奏的机会。

该模式包括一个持续时间为τ的短间隔,和3τ的长间隔。因此,节奏的速度与短间隔的持续时间τ成反比,并直接由其决定。通过这种参数化方法,我们生成了5种不同速度的节奏,τ ∈ [400, 600] 毫秒。为了与双任务范式保持一致,我们明确指示参与者主要任务始终优先于次要任务。
使用这一次要的敲击任务和主要的遥操作任务,我们旨在捕捉参与者的认知负荷,并深入了解他们在面临并发需求时如何有效地管理他们的认知资源。这反映了在现实世界中,个人需要同时处理多项任务或分散注意力的情况。
D. Measures 测量方法
采用客观和主观测量方法,研究机器人在遥操作任务中的自主水平 与 参与者的认知负荷和信任之间的关系。
1)人统计信息:
对于这些信息在遥操作中的潜在相关性,通过一下三个项目,参与者在10分的李克特量表上从1(非常不同意)到10(非常同意)进行评级:
I)我总体上信任新技术;
ii)我经常玩电脑游戏;
iii)我精通一种乐器。
2)表现和生理测量:
收集参与者在主要和次要任务中的表现相关的数据,以及眼球追踪数据(这被评估认知负荷)。
轨迹跟踪误差:以20Hz记录轨迹跟踪误差计算为参考轨迹和记录轨迹之间的RMSE。
敲击误差:记录参与者每次敲击的时间戳,分别计算了两种间隔类型的持续时间,归一化来计算敲击误差。
瞳孔直径:更大的瞳孔扩张与更强烈的认知处理相关;计算瞳孔振荡的低/高频比率。
3)自评测量
每轮五次试验,通过问卷收集以下措施:
自主性 :“感知自主性问卷”[50]已在HRI[51],并且加入:“你觉得机器人有多自主?”,参与者以10分的离散量表进行报告。评估参与者是否察觉到机器人自主水平在两轮之间的变化。
认知负荷 :使用NASA-TLX问卷[13]和所有六个原始子量表来提供认知负荷的综合评估。
信任 :MDMT问卷[32]的能力信任8个子量表。
对比问卷(用单一信任问题):
用一个单一尺度的信任问题来补充MDMT:“你有多信任机器人?”,参与者也使用10分的离散量表进行了报告。为了检测单一的信任措施是否可以可靠地用作高频自评测量工具。
E. Study Design 研究设计
条件:机器人自主性的水平为高(
γ
γ
γ = {0.6, 0.8})或低(
γ
γ
γ = {0.0, 0.2})。平衡的实验设计意味着一半的参与者按递增顺序(
γ
γ
γ 从低到高),另一半参与者按递减顺序(
γ
γ
γ 从高到低)。
通过G*Power进行先验功效分析,计算得出样本量N=24(平均分为两组)。
F. Experimental Procedure 实验程序
略
Results
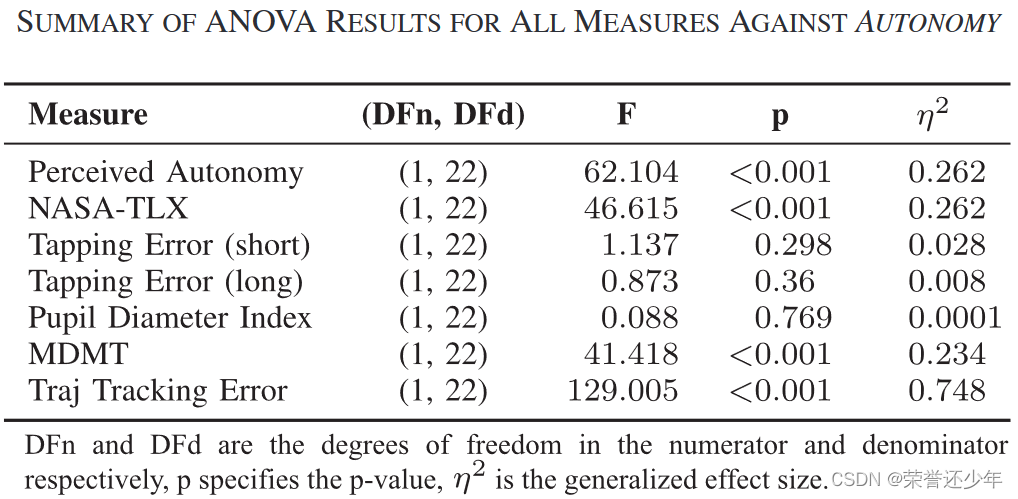
以自主性作为受试者内变量进行重复测量方差分析。在阈值α<.05时,结果被认为是显著的。方差分析结果总结在表一中。
A. Perceived Autonomy 感知自主性
自主性水平对感知自主性有显著影响,参与者正确感知到了施加的自主性水平。
(
F
(
1
,
22
)
=
62.104
,
p
<
.
001
,
η
2
=
.
262
)
(F (1, 22) = 62.104, p < .001, η² = .262)
(F(1,22)=62.104,p<.001,η2=.262)。
B. Cognitive Load 认知负荷
调查了自主性对三个认知负荷测量的影响:NASA-TLX、敲击错误、和瞳孔直径指数。
1)自主性水平影响原始NASA-TLX评分
(
F
(
1
,
22
)
=
46.615
,
p
<
.
001
,
η
2
=
.
262
)
(F(1,22)=46.615,p<.001,η 2=.262)
(F(1,22)=46.615,p<.001,η2=.262),其中6个分量表显示内部一致性
(
C
r
o
n
b
a
c
h
的
α
=
.
762
)
(Cronbach的α=.762)
(Cronbach的α=.762)。
2)与此结果相反,对于短
(
F
(
1
,
22
)
=
1.137
,
p
=
.
298
,
η
2
=
.
028
)
(F(1,22)=1.137,p=.298,η 2=.028)
(F(1,22)=1.137,p=.298,η2=.028) 和长
(
F
(
1
,
22
)
=
.
873
,
p
=
.
36
,
η
2
=
.
008
)
(F(1,22)=.873,p=.36,η 2=.008)
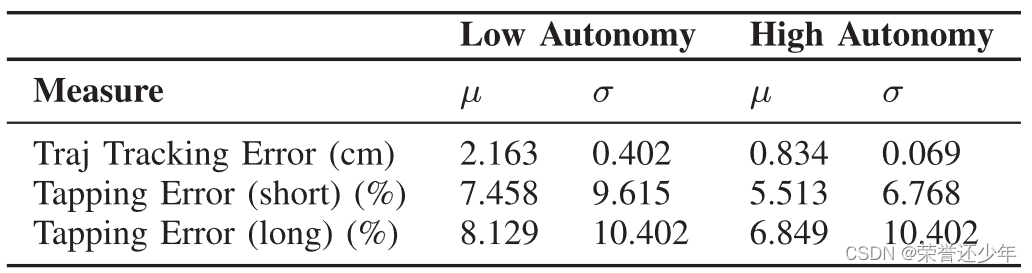
(F(1,22)=.873,p=.36,η2=.008) 节律间隔,没有观察到自主性对敲击误差的明显影响(敲击误差平均值和标准偏差总结在表II中):
3)瞳孔直径指数也没有观察到明显的自主性效应
(
F
(
1
,
22
)
=
.
088
,
p
=
.
769
,
η
2
=
.
0001
)
(F(1,22)=.088,p=.769,η 2=.0001)
(F(1,22)=.088,p=.769,η2=.0001)。
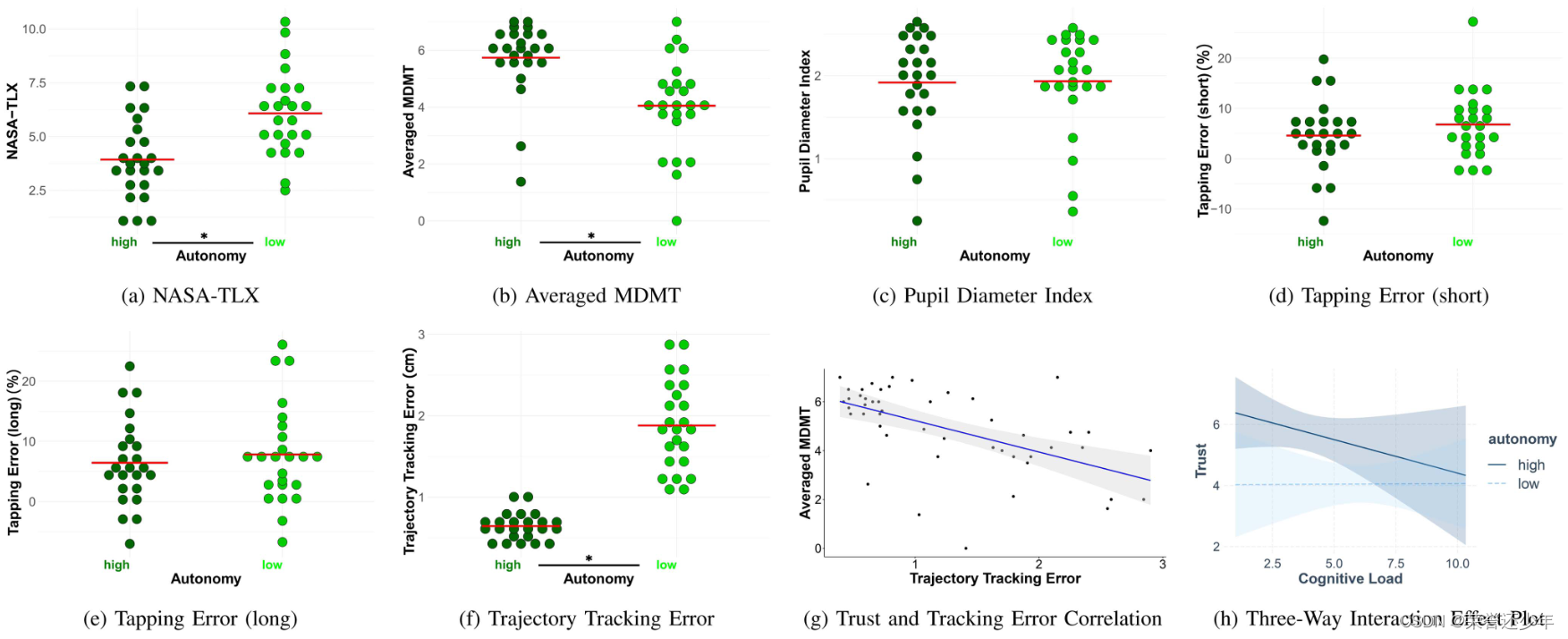
因此:虽然主观的NASA-TLX负荷评估表明,当机器人具有较高的自主性时,用户感知到较低的认知负荷,但双重任务和生理客观测量并没有显示出相同的效果。
C. Trust 信任
MDMT(b)
(
C
r
o
n
b
a
c
h
’
s
α
=
.
968
)
(Cronbach’s α=.968)
(Cronbach’sα=.968)表明了明显的自主性效应
(
F
(
1
,
22
)
=
41.418
,
p
<
.
001
,
η
2
=
.
248
)
(F(1,22)=41.418,p<.001,η 2=.248)
(F(1,22)=41.418,p<.001,η2=.248)。同样,也观察到自主水平影响单尺度信任测度
(
F
(
1
,
22
)
=
33.169
,
p
<
.
001
,
η
2
=
.
234
)
(F(1,22)=33.169,p<.001,η 2=.234)
(F(1,22)=33.169,p<.001,η2=.234)。
结果表明,用户在高度自治条件下具有较高的信任度。
D. Teleoperation Task Performance 遥操作任务执行情况
次要任务不影响参与者的主要任务表现。参与者在机器人自主性水平更高的情况下更准确地执行轨迹跟踪。
图(g)所示当参与者努力准确跟踪机器人轨迹时,他们对机器人的信任程度较低。
E. Cognitive Load & Trust 认知负荷和信任
自主性、认知负荷和信任之间的关系:
1)认知负荷、自主性和信任之间存在集体效应。
2)认知负荷和信任自主性之间没有明显的相互作用。
3)在机器人自主性高的情况下,参与者在认知负荷较高时报告的信任度可能较低。
4)在低自主性情况下,信任度似乎在不同认知负荷水平上大致保持不变。
Discussion
略
Conclusion
本文研究在合作型人机交互任务中,机器人自主性与人类认知负荷和信任之间的关系。1)较高机器人自主性下认知负荷较低的假设,客观的生理和双任务性能测量结果却与主观评估结果不一致。
2)信任和认知负荷之间没有明显的交互作用。
这激励了未来的研究采用更加连续的自主性水平光谱,而不是二元分类(高、低),以进一步探讨机器人自主性与用户认知负荷和信任之间的关系。















 590
590

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









