






 文章提出了一种混合共享控制方法,结合肌电图和人工势场,通过力反馈增强人对远程环境的感知。移动机器人能主动避开障碍并根据人类意图更新控制。实验结果表明,该方法提高了避障性能和控制连续性,实现人机更有效的协作。
文章提出了一种混合共享控制方法,结合肌电图和人工势场,通过力反馈增强人对远程环境的感知。移动机器人能主动避开障碍并根据人类意图更新控制。实验结果表明,该方法提高了避障性能和控制连续性,实现人机更有效的协作。
A Teleoperation Framework for Mobile Robots Based on Shared Control
基于共享控制的移动机器人遥操作框架(RAL 2020)
Abstract
本文提出了一种全向轮移动机器人的混合共享控制方法。
提出了一种基于肌电图(EMG)和人工势场的混合共享控制方法,根据排斥力和吸引力避开障碍物,并基于移动平台的力反馈增强人类对远程环境的感知。
与传统同类相比:提供了基于肌电信号的力反馈,并驱动人类伙伴以可预测性更新其控制意图,移动机器人性能提高。
Introduction
对于遥控移动机器人,其控制策略可以根据用户意图进行更新,从而实现共享控制方法。
先前的工作:共享控制方案经常与其他控制方法相结合。在复杂环境中,柔顺运动控制和自主导航控制的输出被组合以形成共享控制器的输入;移动机器人的力反馈通常用于帮助人类伙伴改善对环境的感知;当移动机器人跟随人类伙伴的指令到达目标位置时,它必须同时自主地避开障碍物。
问题:这些算法可以实现卓越的性能,但它们是从人类的角度设计的。换句话说,移动机器人“被动地”与人类伙伴合作。需要机器人“主动地”与人类合作。
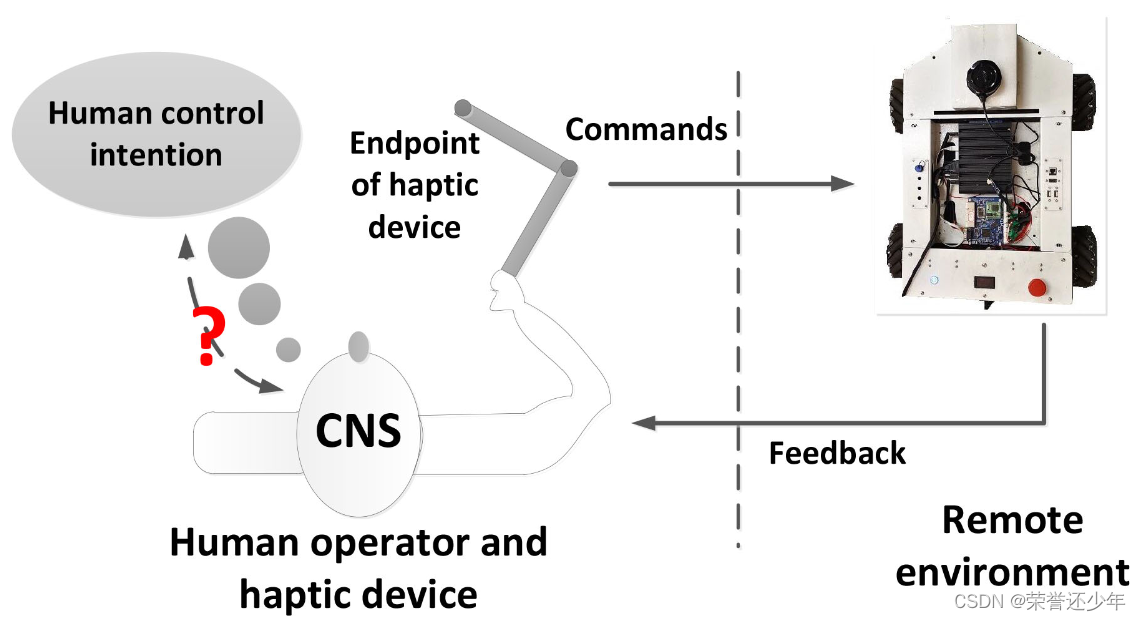
提出要点:要实现“主动”,如何捕捉人类的控制意图并传递给移动机器人?
已有相关方案:通过改变肌电图,以优越的能力灵活地调节他们的阻抗;EMG轮廓可以被视为指示人类控制意图的表示;基于EMG的方法与Kinect传感器和惯性测量单元传感器集成,以实现人类对移动机器人或全向轮椅的控制;
已有相关方案问题:都是基于机器学习开发的,因此很难将其用于移动机器人的实时控制。此外,基于EMG的肌电图信号不直接用于控制应用。
提出解决方案:利用基于中枢神经系统的人类控制策略来开发移动机器人的遥操作框架。基于APF方法,开发了一种基于EMG组件的混合共享控制,以避开障碍并利用力反馈改善双向人机感知。
Preliminaries
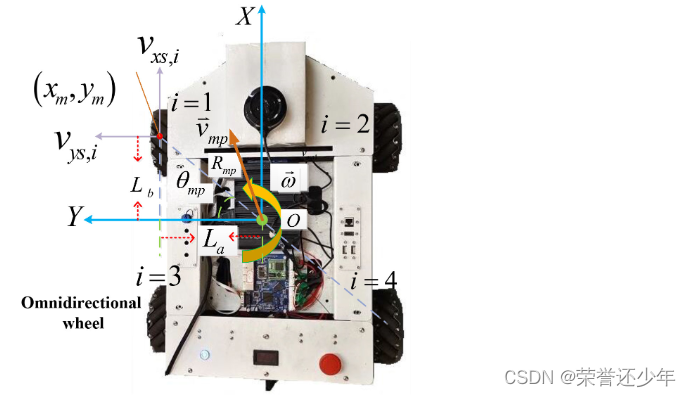
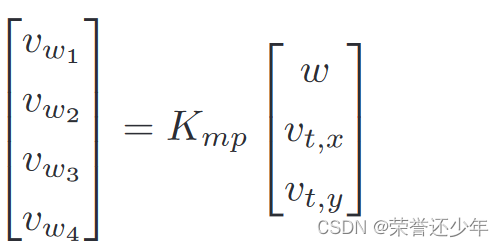
A. 移动平台的动力学
对其全向轮速度
v
x
s
,
i
、
v
y
s
,
i
v_{xs,i}、v_{ys,i}
vxs,i、vys,i 建模,得到移动平台的速度:
(推导以及其他建模不再赘述)
B. 肌电信号的处理
利用肌电传感器来捕捉肌肉活动,EMG信号
u
e
m
g
u_{emg}
uemg 可以表示为:

需要对肌电信号进行移动平均滤波、低通滤波和包络滤波。在对肌电信号进行滤波后,基于肌电信号可以呈现如下:

w
w
i
n
w_{win}
wwin 表示移动窗口的长度,根据经验来确定。
Proposed Framework
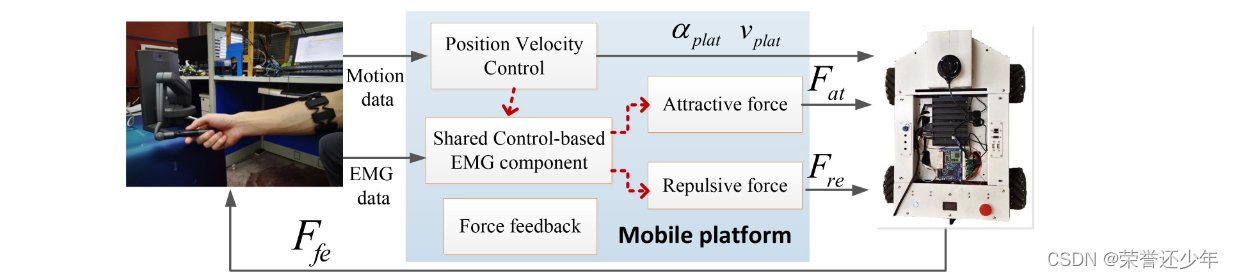
移动机器人的控制结构图所示。移动平台在任务级采用 位置速度控制 和 反馈控制。通信模式移动机器人的控制结构描述如下:
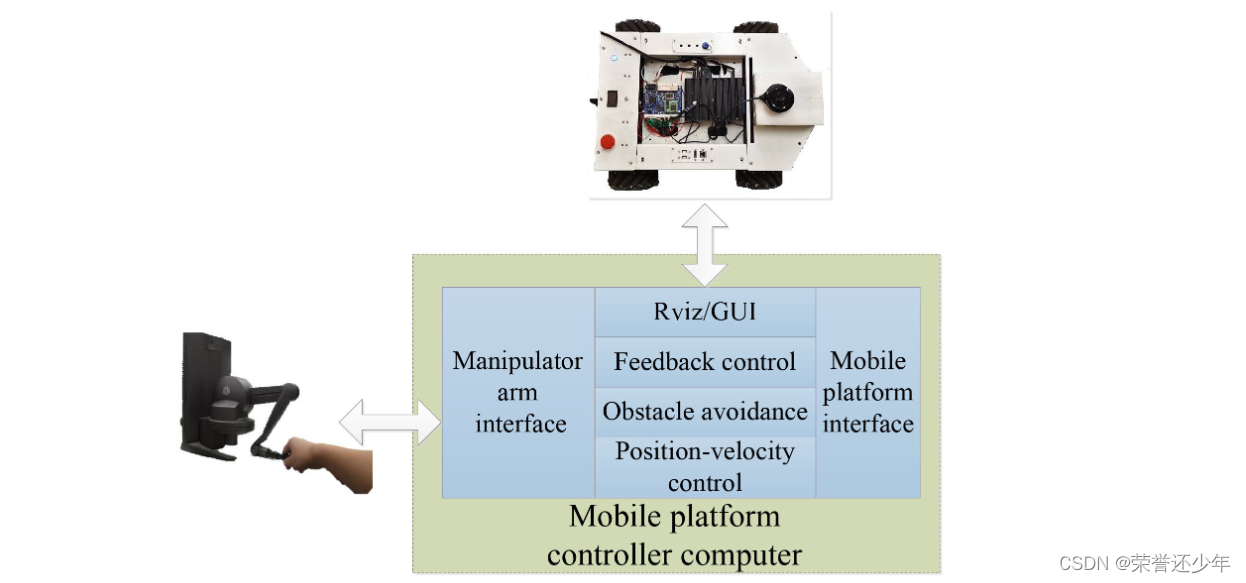
A. 系统构成
在主端,人类佩戴肌电传感器,并移动触觉设备来遥控远程移动机器人。( EMG传感器用于捕捉EMG信号以反映肌肉激活;触觉设备通过笛卡尔工作空间中的可移动触控笔向远程移动平台发送位置和速度;远程机器人包含一个带有四个全向轮的移动平台,并以遥操作模式控制。)
提出了一种基于力反馈的混合共享控制方案,以实现移动平台的避障,并使人类伙伴能够调整其控制意图。图示系统框架构成:
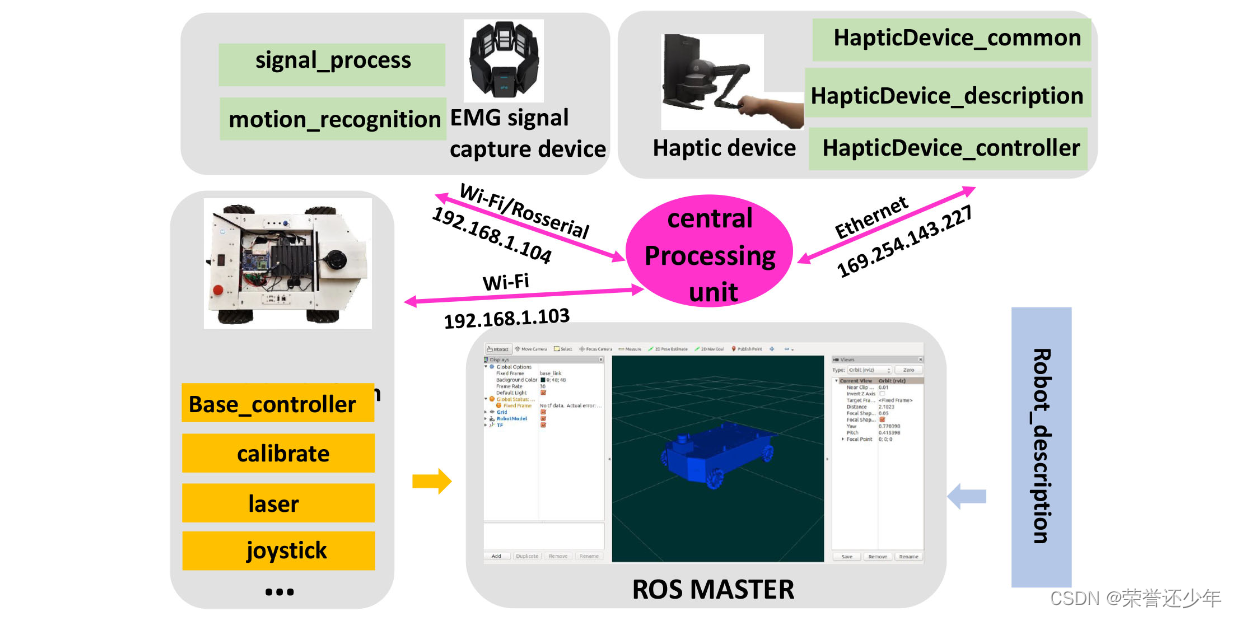
B. 信息通信
遥操作系统采用STM32单片机对移动平台进行控制。移动平台通过WIFI技术与控制器和肌电信号采集设备连接。所提出的遥操作系统的消息通信和模拟器Rviz中的移动机器人模型如图所示。在ROS系统中,通过ROS主机可以实现多个功能,如基本控制器、机器人描述、用户交互等:
C. 运动控制
通过
h
a
p
t
i
c
haptic
haptic 装置的Z轴位置(
Z
m
i
n
Z_{min}
Zmin~
Z
m
a
x
Z_{max}
Zmax)映射到移动平台的速度(
v
m
i
n
v _{min}
vmin~
v
m
a
x
v _{max}
vmax),
h
a
p
t
i
c
haptic
haptic 装置的X、Y轴控制移动平台运动。


D. 混合共享控制
移动平台移动到目标位置中,会遇到障碍物。当移动平台接近障碍物时,人控制它以尽快避开障碍物(在这个阶段,肌电图信号可以直接反映人的控制意图)。移动平台接收基于混合共享控制方法的合力(排斥力和吸引力),以驱动移动平台远离障碍物(在该过程中,触觉设备可以接收力反馈并向人类伴侣提供刺激。同时力反馈可以使移动平台远离障碍物)。
定义一个线性函数来描述基于EMG的成分:(个人认为同运动控制思路)


当人通过
h
a
p
t
i
c
haptic
haptic 装置接收力反馈时,改变操作以避开障碍,并且肌电图(EMG)将改变。在混合共享控制中,EMG可以改变排斥力和吸引力的值。
当移动平台向障碍物移动时,肌电信号转换成比例系数,以增加合力,从而实现快速避开障碍物。
针对图中的移动平台,使用结合了APF和基于EMG的混合共享控制方案:
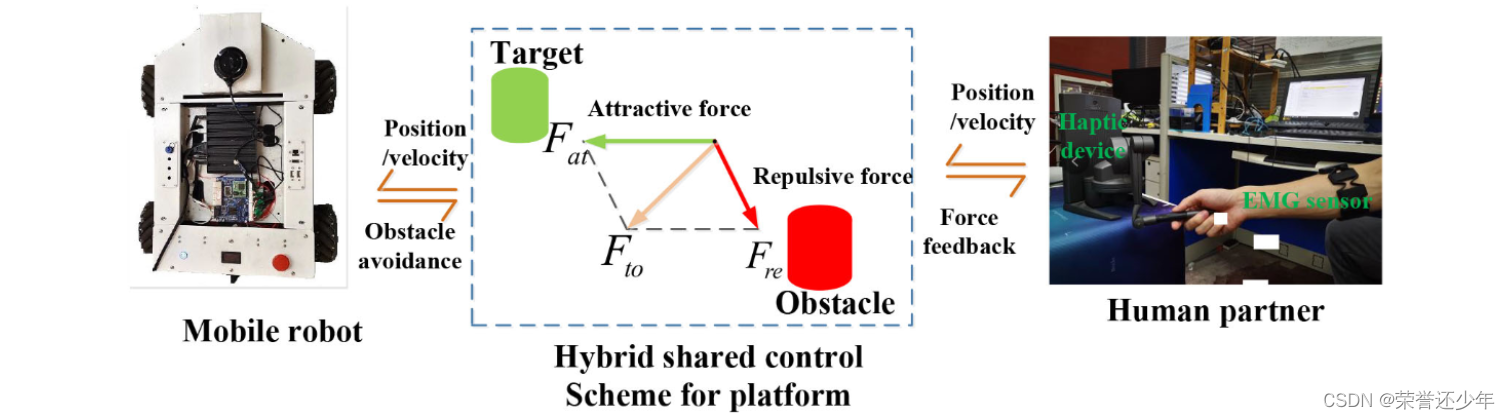
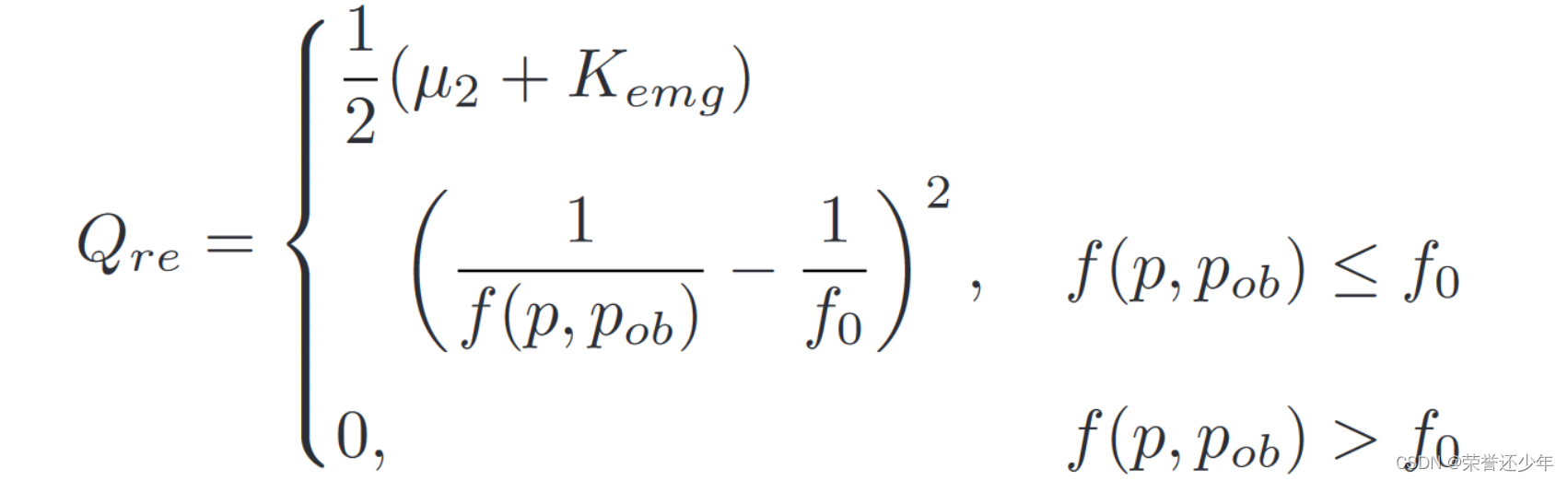
移动平台的运动由力场中的合力决定。这个合力包含一个排斥力和一个吸引力。排斥力推动平台远离障碍物。吸引力使平台移动到目标位置。混合共享控制
Q
t
o
Q_{to}
Qto 的APF可表示为:


其中
Q
a
t
Q_{at}
Qat 表示混合重力势场函数。
Q
r
e
Q_{re}
Qre 是混合排斥势场函数。
μ
1
\mu_{1}
μ1 是引力增益参数。
f
(
p
,
p
g
o
)
f(p,p_{go})
f(p,pgo) 表示从目标到移动平台的距离,其中
p
g
o
p_{go}
pgo 是目标的位置,
μ
2
\mu_{2}
μ2 是排斥增益参数,
f
0
f_{0}
f0是每个障碍物的影响半径。
则吸引力定义为:


排斥力定义为:
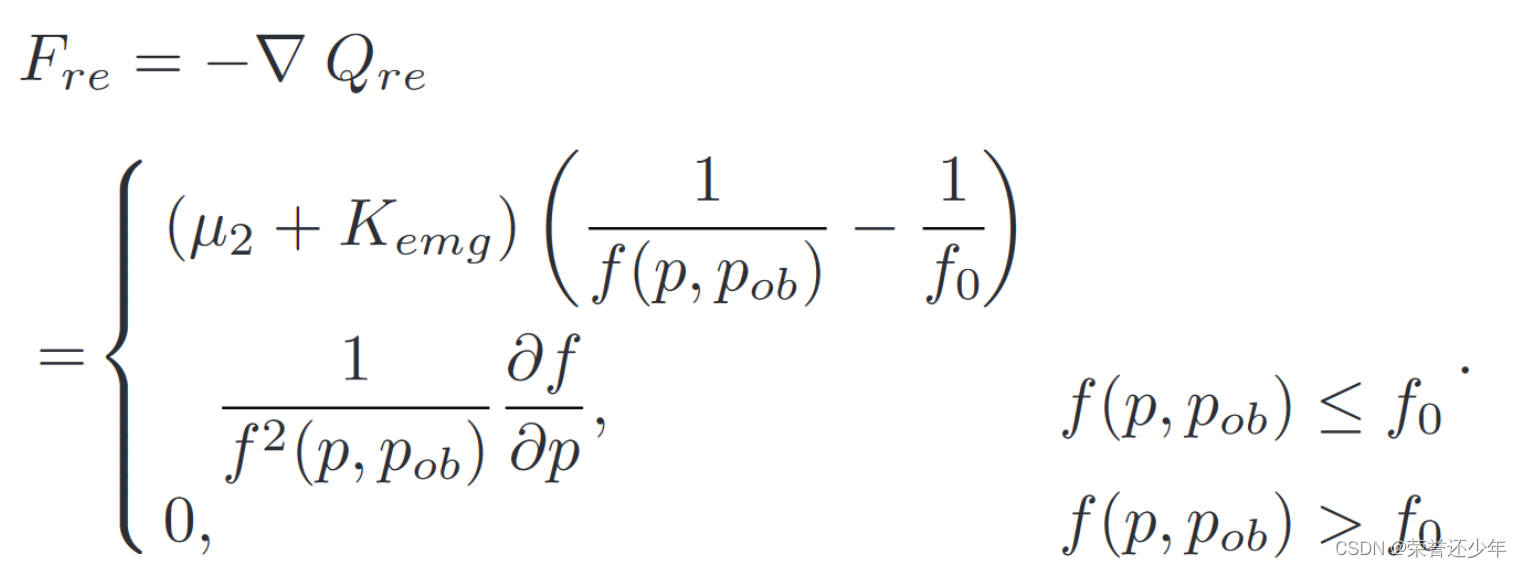
E. 力反馈
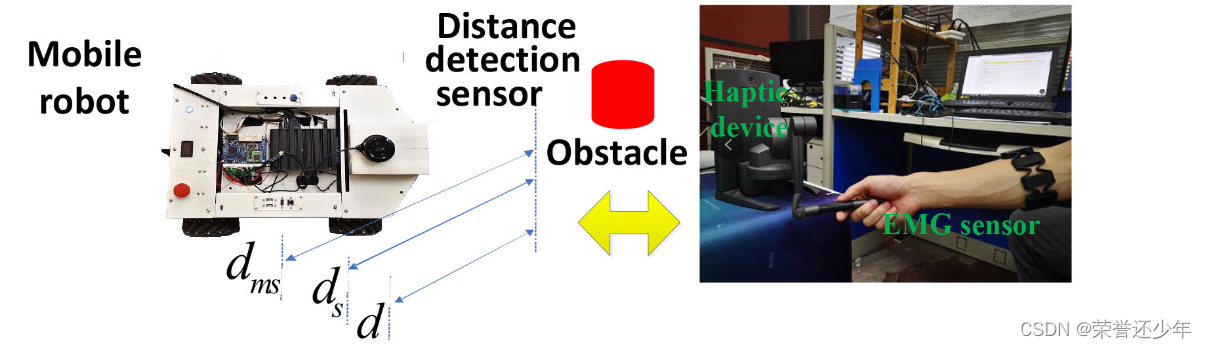
当移动平台与障碍物的距离
d
d
d 小于安全距离
d
s
d_{s}
ds 时,移动平台通过
h
a
p
t
i
c
haptic
haptic 设备向人提供力反馈,操作员可以通过命令来控制移动平台。其中
K
f
e
K_{fe}
Kfe 是平台的正增益参数。
d
m
w
d_{mw}
dmw 和
d
s
d_{s}
ds 分别是 警告距离 和 安全距离 的最大值(警告距离的最大值 表示 最小安全距离。)移动平台的力反馈定义为:

触觉设备和移动平台的低级控制是比例导数(PD)控制器。基于EMG的分量被转移到系数
K
e
m
g
>
0
K_{emg}>0
Kemg>0 该系数自适应PD控制器的控制参数;如果PD控制器的参数是正定的,闭环系统的稳定性可以得到保证。具有人和移动平台的触觉设备是典型的遥操作系统,由于其无源性不受所提出方法的影响,因此可以保证稳定性。
Experiment and Results
A. 实验装置
MYO臂带用于捕捉遥操作过程中的EMG信号;
Touch X作为触觉设备,通过WIFI技术控制移动平台和机械臂;
激光雷达安装在移动平台的主体上;
所有设备都在ROS和Windows环境下运行。
B. 避障实验
实验结果中,
−
c
1
-c1
−c1 和
−
c
2
-c2
−c2 分别表示无肌电成分和有肌电成分时的结果。
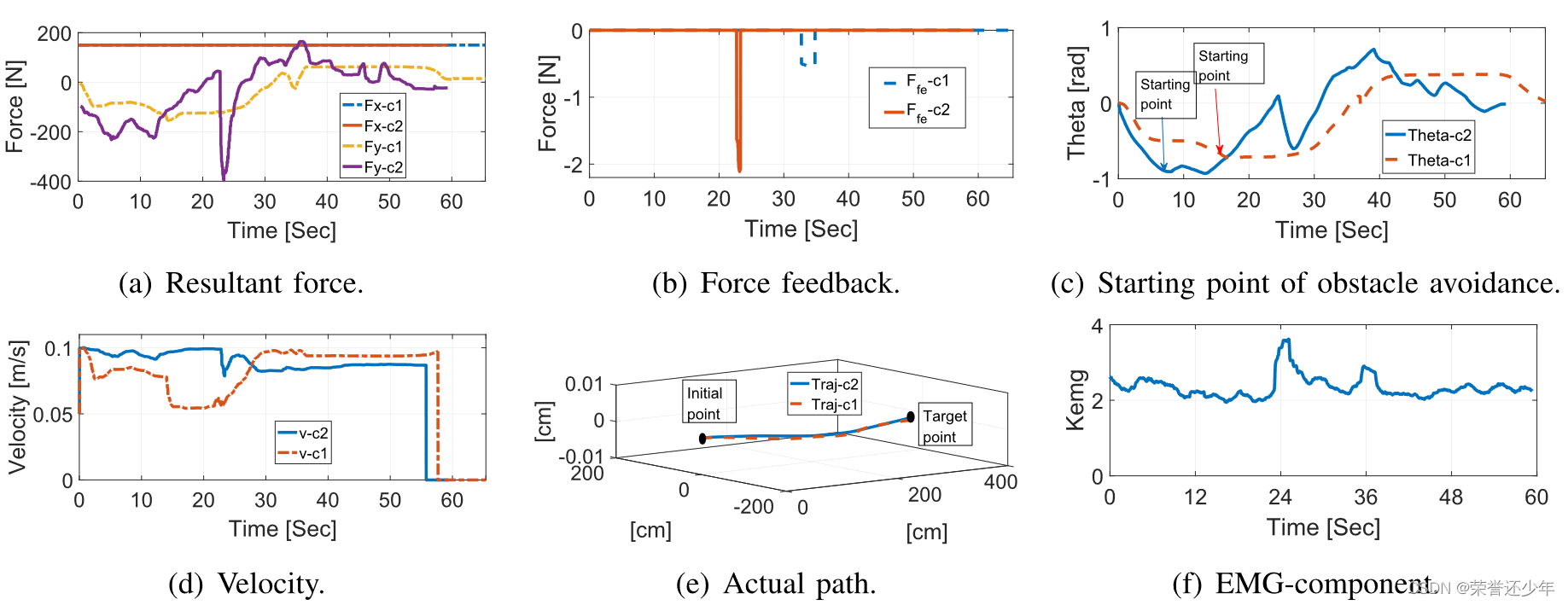
a:当移动平台在没有基于EMG的组件的情况下被控制时,移动平台在避障过程中受到的合力比较小,基于EMG的具有更好的避障性能。
b:具有基于EMG的分量的触觉装置可以接收更大的反馈力。
c:避障过程的旋转角度的波峰和波谷的数量与障碍物的数量有关,因此可以看出,在单障碍物环境中,曲线的第一个波谷表示障碍物。基于EMG组件的方法可以提前实现避障。
d:避障过程中的速度性能;基于EMG的成分(蓝色曲线)的情况下速度更连续。

显示了在避障任务中行驶的总时间和总路径的位移。可以发现,有基于EMG的成分和没有基于EMG的成分的完成时间分别为58.4510 s和64.9429 s。类似地,具有基于EMG的部件的情况下的总位移比没有基于EMG的部件的情况下的总位移短。
Conclusion
集成了APF和EMG组件的混合共享控制方案可以提供相对较大的合力,并且纳入了人为因素。合力、力反馈响应效果更好,实现人机“主动”协作。
由于短距离控制,对于长距离的时滞性控制是以后的另外研究方向。

















 538
538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









