






 本文介绍了一种结合领航追随法和人工势场法的车辆编队控制方法,利用MATLAB实现动态避障,以提升编队的稳定性和安全性。实验证明了该策略的有效性。
本文介绍了一种结合领航追随法和人工势场法的车辆编队控制方法,利用MATLAB实现动态避障,以提升编队的稳定性和安全性。实验证明了该策略的有效性。
MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
摘要:随着无人驾驶技术的快速发展,车辆编队控制成为了一个备受关注的研究领域。本文以MATLAB为工具,结合领航追随法和人工势场法,提出了一种简单易懂的车辆编队控制策略。该方法通过领航追随者与人工势场法的融合,实现了车辆编队控制过程中的动态避障,提高了编队的稳定性和安全性。
关键词:车辆编队控制,领航追随法,人工势场法,避障,MATLAB
1. 引言
随着无人驾驶技术的不断发展,车辆编队控制问题逐渐引起了研究者们的广泛关注。车辆编队控制可以提高交通效率,降低能源消耗,并具有广阔的应用前景。在车辆编队控制中,领航追随法和人工势场法是两种常用的控制策略。本文旨在结合这两种策略,实现车辆编队控制过程中的动态避障,提高编队的稳定性和安全性。
2. 领航追随法
领航追随法是一种基于距离和方向控制的编队控制策略。领航者负责引领编队,追随者根据领航者的运动状态来调整自己的运动状态。领航追随法通过定义适当的距离和方向差,实现了编队车辆之间的协同运动。MATLAB提供了丰富的函数和工具箱,可以方便地实现领航追随法算法。
3. 人工势场法
人工势场法是一种基于势场概念的编队控制策略。该方法通过构建势场函数,将目标位置和障碍物位置作为势场的引力和斥力源,从而引导编队车辆实现目标位置的靠近和障碍物的回避。MATLAB中的优化工具箱和仿真工具箱提供了丰富的函数和模型,便于实现人工势场法算法。
4. 融合实现避障
为了在编队控制过程中实现动态避障,本文将领航追随法和人工势场法进行了融合。首先,利用领航追随法确保编队车辆之间的协同运动,并实现编队的形成。然后,在人工势场法的基础上,增加了动态障碍物检测和回避模块。通过检测车辆周围的障碍物信息,计算出相应的斥力,使车辆避开障碍物并继续保持编队形态。
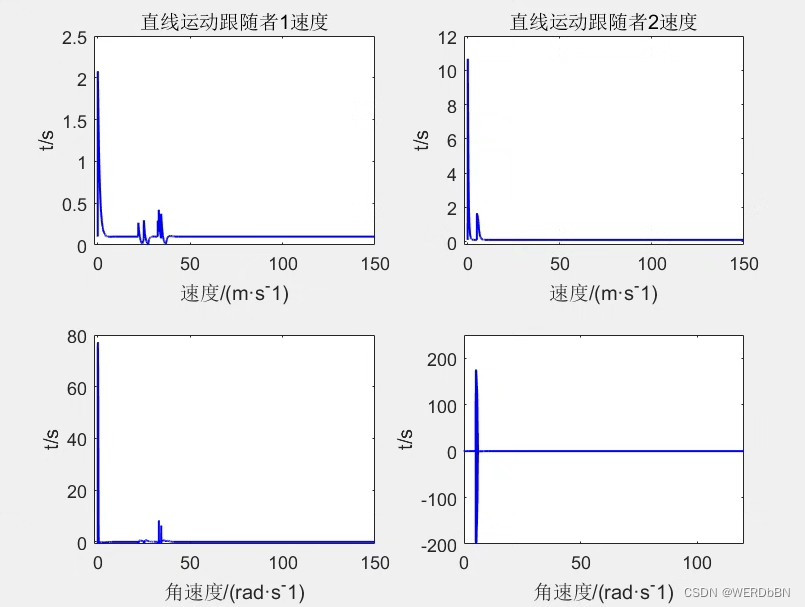
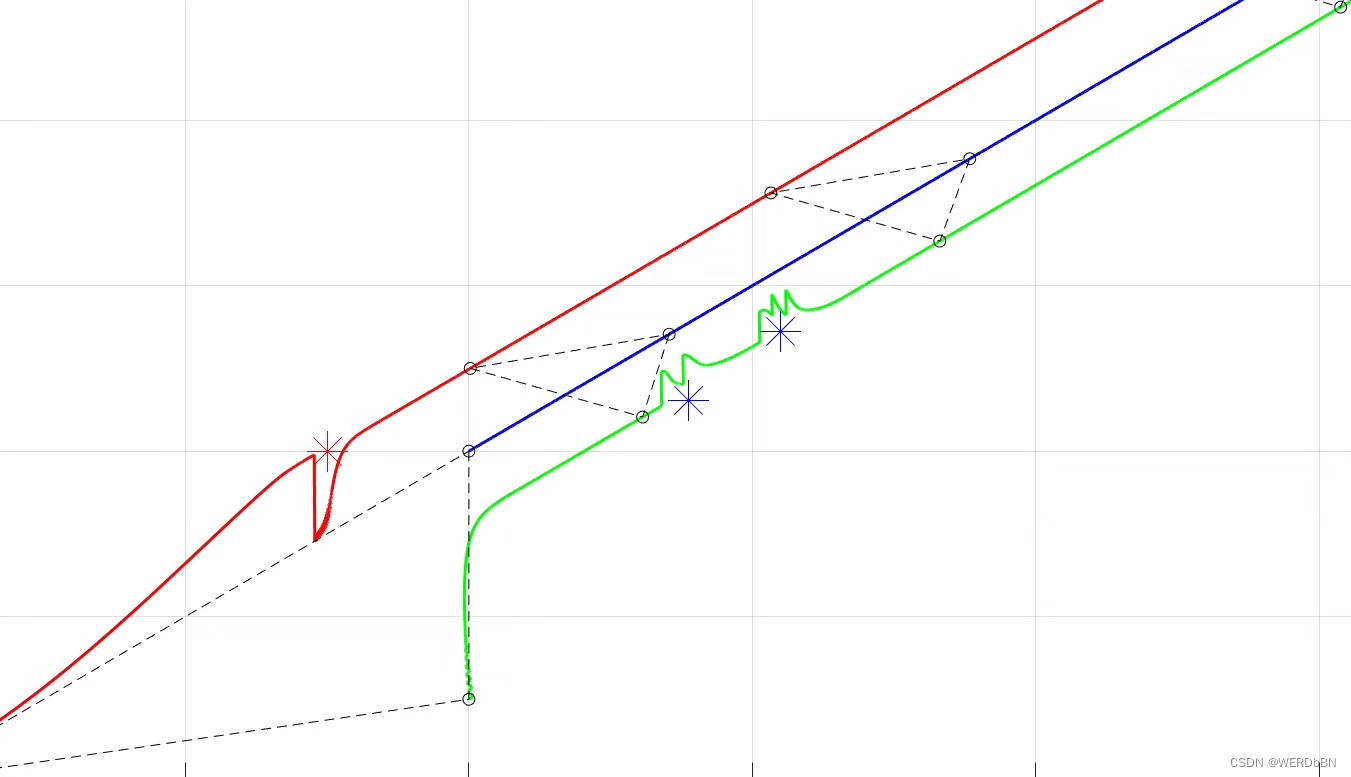
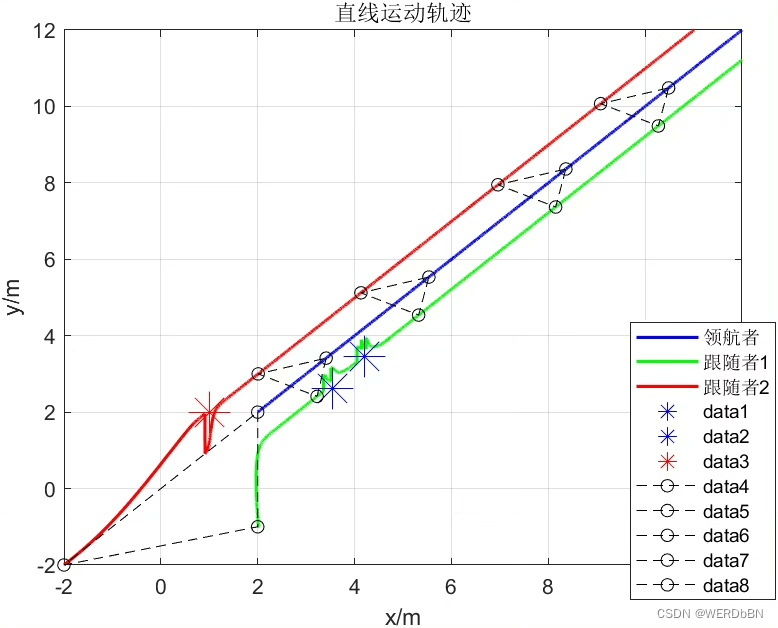
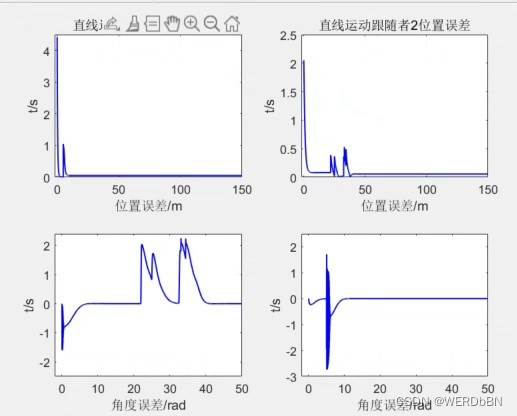
5. 实验结果与分析
本文使用MATLAB编写了车辆编队控制的仿真程序,并进行了多组实验。实验结果表明,融合领航追随法和人工势场法的编队控制策略在动态避障方面表现出良好的性能。编队车辆能够灵活地避开障碍物,并保持稳定的编队形态。
6. 结论
本文以MATLAB为工具,结合领航追随法和人工势场法,提出了一种简单易懂的车辆编队控制策略。通过融合实现避障功能,该策略提高了编队的稳定性和安全性。实验结果表明,该方法在动态避障方面表现出良好的性能,具有实际应用价值。
相关代码,程序地址:http://lanzoup.cn/771257394948.html















 1082
1082











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









