







本文目录
RANSAC原理
在此之前的博客里面,我们学会了SIFT匹配算法
然而因为在匹配时由于图片原因,很可能会出现部分错配现象,应该采用少数服从多数,剔除掉这些少数不合适的点。
对于普通最小二乘法来说是保守派:
在现有数据下,如何实现最优。是从一个整体误差最小的角度去考虑,尽量谁也不得罪。
对于RANSAC来说是改革派:
首先假设数据具有某种特性(目的),为了达到目的,适当割舍一些现有的数据。
RANSAC是“RANdom SAmple Consensus”(随机一致性采样)的缩写,它于1981年由Fischler和Bolles最先提出。该方法是用来找到正确模型来拟合带有噪声数据的迭代方法。给定一个模型,例如点集之间 的单应性矩阵,RANSAC 基本的思想是,数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。
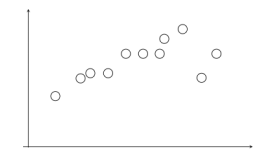
RANSAC算法(随机采样一致)原本是用于数据处理的一种经典算法,其作用是在大量噪声情况下,提取物体中特定的成分。下图是对RanSaC算法效果的说明。图中有一些点显然是满足某条直线的,另外有一团点是纯噪声。目的是在大量噪声的情况下找到直线方程,此时噪声数据量是直线的3倍。
给出最小二乘拟合(红线)、RANSAC(绿线)对于一阶直线、二阶曲线的拟合对比:

可以看到RANSAC可以很好的拟合。RANSAC可以理解为一种采样的方式,所以对于多项式拟合、混合高斯模型(GMM)等理论上都是适用的。
RANSAC假设
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
局外点产生的原因有:噪声的极值;错误的测量方法;对数据的错误假设。
RANSAC也做了以下假设:给定一组(通常很小的)局内点,存在一个可以估计模型参数的过程;而该模型能够解释或者适用于局内点。
RANSAC示例
一个简单的例子是从一组观测数据中找出合适的2维直线。假设观测数据中包含局内点和局外点,其中局内点近似的被直线所通过,而局外点远离于直线。简单的最小二乘法不能找到适应于局内点的直线,原因是最小二乘法尽量去适应包括局外点在内的所有点。相反,RANSAC能得出一个仅仅用局内点计算出模型,并且概率还足够高。但是,RANSAC并不能保证结果一定正确,为了保证算法有足够高的合理概率,我们必须小心的选择算法的参数。
RANSAC概述
RANSAC算法的输入是一组观测数据,一个可以解释或者适应于观测数据的参数化模型,一些可信的参数。
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
RANSAC思路
随机选择四对匹配特征
根据DLT计算单应矩阵 H (唯一解)
对所有匹配点,计算映射误差ε= ||pi’, H pi||
根据误差阈值,确定inliers(例如3-5像素)
针对最大inliers集合,重新计算单应矩阵 H
1.在给定若干二维空间中的点,求直线 y=ax+b ,使得该直线对空间点的拟合误差最小。
2.随机选择两个点,根据这两个点构造直线,再计算剩余点到该直线的距离
给定阈值(距离小于设置的阈值的点为inliers),计算inliers数量
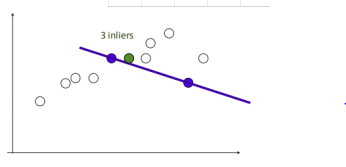
3.再随机选取两个点,同样计算inliers数量
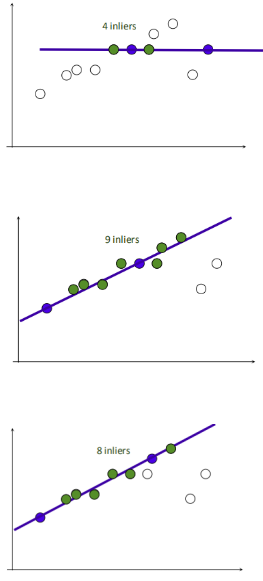
4.循环迭代,其中inliers最大的点集即为最大一致集,最后将该最大一致集里面的点利用最小二乘拟合出一条直线。
APAP
在图像拼接融合的过程中,受客观因素的影响,拼接融合后的图像可能会存在“鬼影现象”以及图像间过度不连续等问题。下图就是图像拼接的一种“鬼影现象”。解决鬼影现象可以采用APAP算法。

算法流程:
1、提取两张图片的sift特征点
2、对两张图片的特征点进行匹配,匹配的过程引用了论文(Distinctive Image Features from Scale-Invariant Keypoints)
3、匹配后,仍有很多错误点,此时使用论文(Accelerated Hypothesis Generation for Multi-Structure Robust Fitting)提到的RANSAC的改进算法进行特征点对的筛选。筛选后的特征点基本能够一一对应。
4、使用DLT算法(Multiple View Geometry p92提到),将剩下的特征点对进行透视变换矩阵的估计。
5、因为得到的透视变换矩阵是基于全局特征点对进行的,即一个刚性的单应性矩阵完成配准。为提高配准的精度,Apap将图像切割成无数多个小方块,对每个小方块的变换矩阵逐一估计。

Apap虽然能够较好地完成配准,但非常依赖于特征点对。若图像高频信息较少,特征点对过少,配准将完全失效,并且对大尺度的图像进行配准,其效果也不是很好,一切都决定于特征点对的数量。
multi-band bleing
在找完拼接缝后,由于图像噪声、光照、曝光度、模型匹配误差等因素,直接进行图像合成会在图像重叠区域的拼接处出现比较明显的边痕迹。

这些边痕迹需要使用图像融合算法来消除。这里介绍一种方法—multi-band bleing
思想:采用的方法是直接对带拼接的两个图片进行拉普拉斯金字塔分解,后一半对前一半进行融合。
步骤:
首先计算当前待拼接图像和已合成图像的重叠部分。并对图像A、B 重叠部分进行高斯金字塔和拉普拉斯金字塔分解

G0为原始图像,G1表示对G0做reduce操作。Reduce操作定义如下:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 3532
3532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









