







一.系统概述
智能路灯控制系统,具有以下核心功能:
1. 核心控制器与时钟功能:使用STM32F103单片机作为系统的核心控制器。系统内置时钟功能,用于时间管理和定时控制。
2. 显示与按键设定:OLED显示屏用于实时显示采集到的各种数据信息。按键模块允许用户设定路灯亮的时间段以及其他参数的阈值。
3. 路灯控制逻辑:在用户设定的时间内,路灯保持常亮。非设定时间内根据环境智能调节亮度。
4. 传感器数据采集与控制:红外光电传感器检测是否有人经过,光照传感器采集环境光照强度,声音传感器检测环境中的声音,空气质量传感器监测空气质量,超声波测距模块检测经过的人和车的速度,ADXL345传感器采集路灯杆的倾角。
5. 报警与上位机通信:在定时模式内,若光照传感器检测到灯未亮,则触发蜂鸣器报警并将报警信息发送至上位机。非定时时间内,当红外传感器检测到人且声音传感器检测到声音时,路灯会亮起并在人离开后自动熄灭。当空气质量超过设定阈值时,控制路灯亮起。如果ADXL345传感器检测到路灯杆倾角过大,会触发蜂鸣器报警并发送报警信息到上位机。超声波测距模块检测到超速时,会控制蜂鸣器报警提醒。

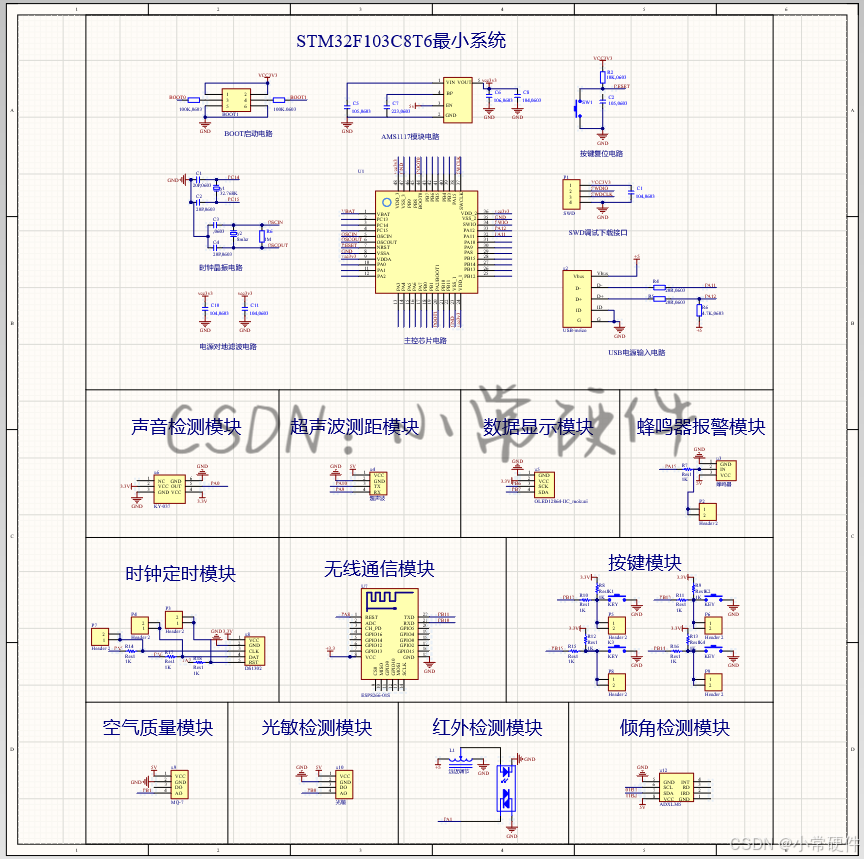
二.电路设计
电路图采用Altium Designer进行设计:
1. 通过STM32F103C8T6单片机作为系统主控,最小系统电路是整个电路的核心;
2. 通过0.96寸的OLED12864进行数据显示,采用IIC总线的形式与单片机进行通信;
3. 通过DS1302实现时钟定时,并通过SDA、SCK、DAT三个引脚与单片机进行连接;
4. 使用光敏电阻模块进行光强检测,传感器的模拟端与单片机的模拟输入端相接;
5. 使用MQ-135进行空气质量检测并将模块的模拟输出脚与单片机的模拟输入脚相接;
6. 使用HC-SR04超声波测距模块进行速度检测,并通过Echo(超声波接收脚)和Trig(超声波发射脚)与单片机的GPIO脚进行连接;
7. 使用ADXL345加速度传感器进行车辆的晃动检测,并采用IIC总线与单片机进行通信;
8. 使用KY-037声音传感器进行声音检测,模块的模拟输出脚与单片机的模拟输入脚进行连接;
9. 使用蜂鸣器进行报警,蜂鸣器采用的有源蜂鸣器,使用NPN三极管进行蜂鸣器进行驱动;
10. 通过ESP8266-01S将检测到数据上传到上位机,通过UART串口与单片机进行通信;
11. 通过0.96寸的OLED12864进行数据显示,采用IIC总线的形式与单片机进行通信。
三.程序设计
#include "sys.h"
#include "delay.h"
#include "adc.h"
#include "math.h"
#include "key.h"
#include "OLED_I2C.h"
#include "Beep_Led_Relay.h"
#include "Control_Report_To_Police.h"
/************************************************
版权:小常硬件
公众号:微信搜索“小常硬件“在公众号免费下载相关资料
************************************************/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init(); //延时函数初始化
Beep_init(); //pB8
Beep=0;//
Led0_init(); //PA11
Led0_0=0;
KEY1_Init();
TIM4_Init(300,7200);
OLED_Init(); //OLED初始化
Adc_Init(); //PB0 light
Adc_Init1(); //PB1 kongqi
Hcsr04_Timer2_Init(); //PA9 PA10
E18_D80_Init(); //PA1 PA0 shegnyin
DS1302_GPIO_Init_Write_Time();//PA5 PA6 PA7
while(ADXL345_IIC_GPIO_Init())//PB10 PB11
delay_ms(500);
OLED_CLS(); //OLED清屏
OLED_ShowCN(8,2,0); //小常硬件
OLED_ShowCN(32,2,1);
OLED_ShowCN(56,2,2);
OLED_ShowCN(80,2,3);
OLED_ShowCN(32,5,4);
OLED_ShowCN(56,5,5);
delay_ms(500);
ALi_ESP8266_GPIO_Init();
MQTT_Buff_Init();
AliIoT_Parameter_Init();
while(1)
{
OLED_Display_Cotrol(); //显示控制函数
}
}
四.资料内容


















 980
980

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











