






1、利用SysTick定时器编写倒计时程序,如初始设置为2分30秒,每秒在屏幕上输出一次时间,倒计时为0后,红灯亮,停止屏幕输出,并关闭SysTick定时器的中断。
源代码:
main.c
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
uint8_t mSec; //记当前秒的值
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
wdog_stop();
//"时分秒"倒计时初始化
gTime[0] = 0; //时
gTime[1] = 2; //分
gTime[2] = 30; //秒
mSec = gTime[2]; //记住当前秒的值
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯暗
systick_init(10); //设置systick为10ms中断
//(1.6)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
printf(" 广州大学 网络211 GXY \n");
printf(" 利用SysTick定时器编写倒计时程序\n");
printf(" 如初始设置为2分30秒,每秒在屏幕上输出一次时间\n");
printf(" 倒计时为0后,红灯亮,停止屏幕输出\n");
printf(" 并关闭SysTick定时器的中断\n");
printf("------------------------------------------------------\n");
for(;;)
{
if (gTime[2] == mSec) continue;
mSec=gTime[2];
printf("%d:%d:%d\n",gTime[0],gTime[1],gTime[2]);
if(gTime[0]==0&&gTime[1]==0&&gTime[2]==0){
gpio_set(LIGHT_RED,LIGHT_ON); //设置灯“亮”
systick_close();
printf("红灯亮!");
break;
}
}
}
isr.c
#include "includes.h"
//声明使用到的内部函数
//isr.c使用的内部函数声明处
//void SecAdd1(uint8_t *p);
void SecSub1(uint8_t *p);
void SysTick_Handler()
{
//printf("***\n");
static uint8_t SysTickCount = 0;
SysTickCount++; //Tick单元+1
wdog_feed(); //看门狗“喂狗”
if (SysTickCount >= 100)
{
SysTickCount = 0;
SecSub1(gTime);
}
}
//实现倒计时,秒-1
void SecSub1(uint8_t *p)
{
*(p+2)-=1; //秒-1
if(*(p+2)<=0)
{
if(*(p+1)<=0){ //计时结束
return;
}
*(p+2)=60; //重置为60秒
*(p+1)-=1; //分-1
if(*(p+1)<=0)
{
if(*p<=0){
return;
}
*(p+1)=60; //清分
*p-=1; //时-1
if(*p<=24)
{
return;
}
}
}
}
在对应的的systic.h 和systick.c中分别声明和实现关闭systick函数
void systick_close(){
SysTick->CTRL=0; //禁止 SysTick
SCB->ICSR |= (1<<25); //清除 SYSTICK 挂起位,防止再次挂起
}
运行结果:
可以看到程序在正确的倒计时
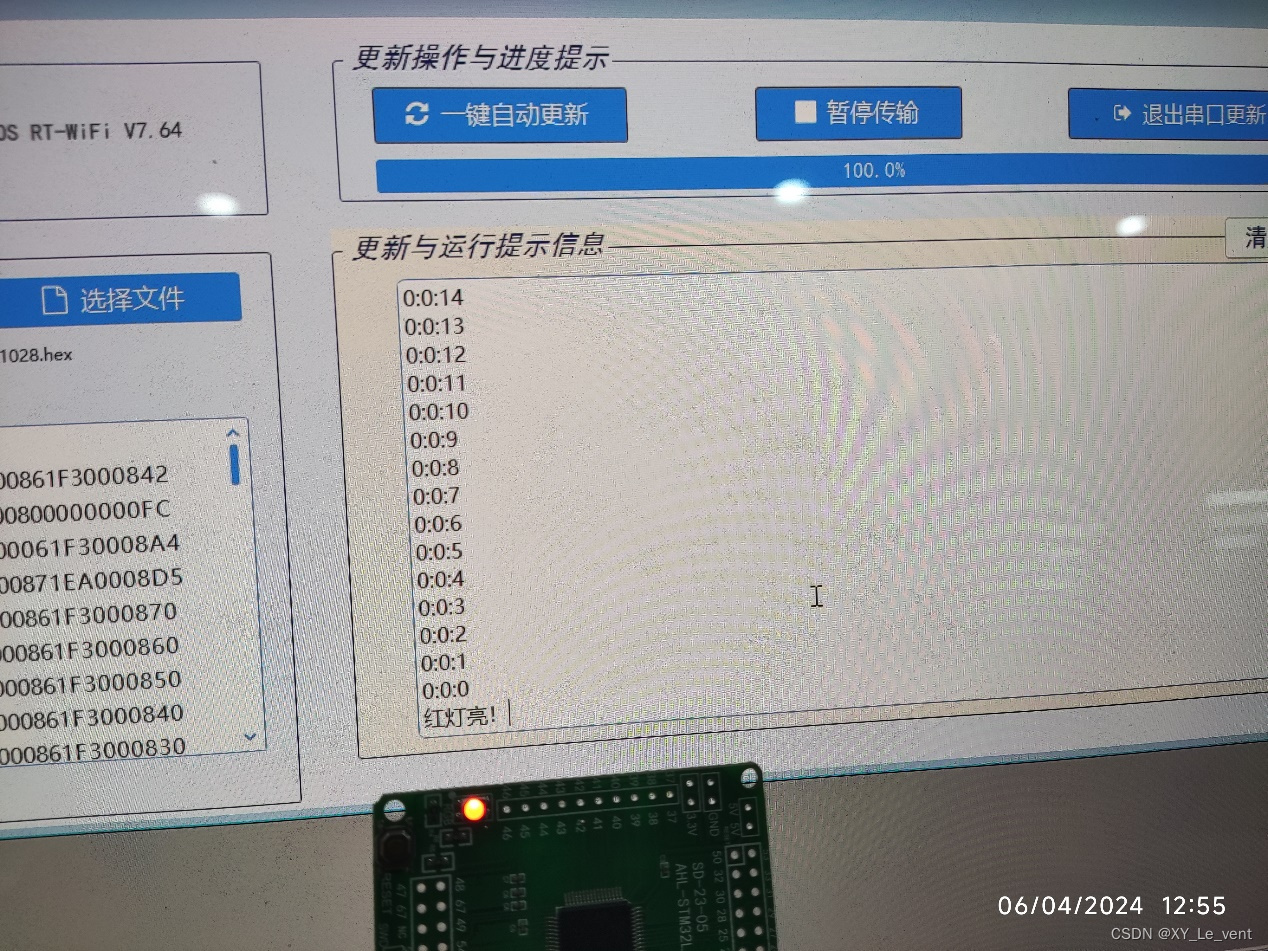
可以看到倒计时成功,且在完成倒计时后红灯亮起来了。
2、利用RTC显示日期(年月日、时分秒),每秒更新。并设置某个时间的闹钟。闹钟时间到时,屏幕上显示有你的姓名的文字,并点亮绿灯。
源代码:
main.c
#define GLOBLE_VAR
#include "includes.h"
int main(void)
{
//(1.1)声明main函数使用的局部变量
uint32_t mMainLoopCount; //主循环次数变量
DISABLE_INTERRUPTS;
mMainLoopCount=0; //主循环次数变量
//(1.4)给全局变量赋初值
g_RTC_Flag=0;
//(1.5)用户外设模块初始化
gpio_init(LIGHT_GREEN,GPIO_OUTPUT,LIGHT_OFF); //初始化蓝灯
uart_init(UART_User,115200);
RTC_Init(); //RTC初始化
RTC_Set_Time(0,0,0); //设置时间为0:0:0
RTC_Set_Date(0,0,0,0); //设置日期
//(1.6)使能模块中断
RTC_PeriodWKUP_Enable_Int(); //使能唤醒中断
uart_enable_re_int(UART_User); //使能接收中断
RTC_Alarm_Enable_Int(0); //使能闹钟中断
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
RTC_Set_PeriodWakeUp(1); //配置WAKE UP中断,每秒中断一次
RTC_Set_Alarm(0,2,14,47,0); //配置闹钟时间
printf("------------------------------------------------------\n");
printf(" 广州大学 网络211 GXY \n");
printf(" 利用RTC显示日期(年月日、时分秒),每秒更新\n");
printf(" 并设置某个时间的闹钟\n");
printf(" 闹钟时间到时,屏幕上显示有你的姓名的文字,并点亮绿灯\n");
printf("------------------------------------------------------\n");
for(;;)
{
mMainLoopCount++;
if (mMainLoopCount<=12888999) continue;
mMainLoopCount=0;
if(g_RTC_Flag==1) //根据串口接收的数据设置基准时间
{
g_RTC_Flag=0;
gcRTC_Date_Time.Year=(uint8_t)((gcRTCBuf[1]-'0')*10
+(gcRTCBuf[2]-'0'));
gcRTC_Date_Time.Month=(uint8_t)((gcRTCBuf[4]-'0')*10+(gcRTCBuf[5]-'0'));
gcRTC_Date_Time.Date=(uint8_t)((gcRTCBuf[7]-'0')*10+(gcRTCBuf[8]-'0'));
gcRTC_Date_Time.Hours=(uint8_t)((gcRTCBuf[10]-'0')*10+(gcRTCBuf[11]-'0'));
gcRTC_Date_Time.Minutes=(uint8_t)((gcRTCBuf[13]-'0')*10+(gcRTCBuf[14]-'0'));
gcRTC_Date_Time.Seconds=(uint8_t)((gcRTCBuf[16]-'0')*10+(gcRTCBuf[17]-'0'));
gcRTC_Date_Time.Weekday=(uint8_t)((gcRTCBuf[23]-'0'));
RTC_Set_Time(gcRTC_Date_Time.Hours,gcRTC_Date_Time.Minutes,gcRTC_Date_Time.Seconds); //设置时间
RTC_Set_Date(gcRTC_Date_Time.Year,gcRTC_Date_Time.Month,gcRTC_Date_Time.Date,gcRTC_Date_Time.Weekday); //设置日期
}
}
}
isr.c中修改RTC闹钟中断处理函数
void RTC_Alarm_IRQHandler(void)
{
if(RTC_Alarm_Get_Int(A)) //闹钟A的中断标志位
{
RTC_Alarm_Clear(A); //清闹钟A的中断标志位
printf("网络211 GXY\n");
gpio_set(LIGHT_GREEN,LIGHT_ON); //绿灯“亮”
}
if(RTC_Alarm_Get_Int(B)) //闹钟B的中断标志位
{
RTC_Alarm_Clear(B); //清闹钟B的中断标志位
printf("网络211 GXY\n");
gpio_set(LIGHT_GREEN,LIGHT_ON); //绿灯“亮”
}
}
运行结果:
设置的闹钟时间为:14:47:0
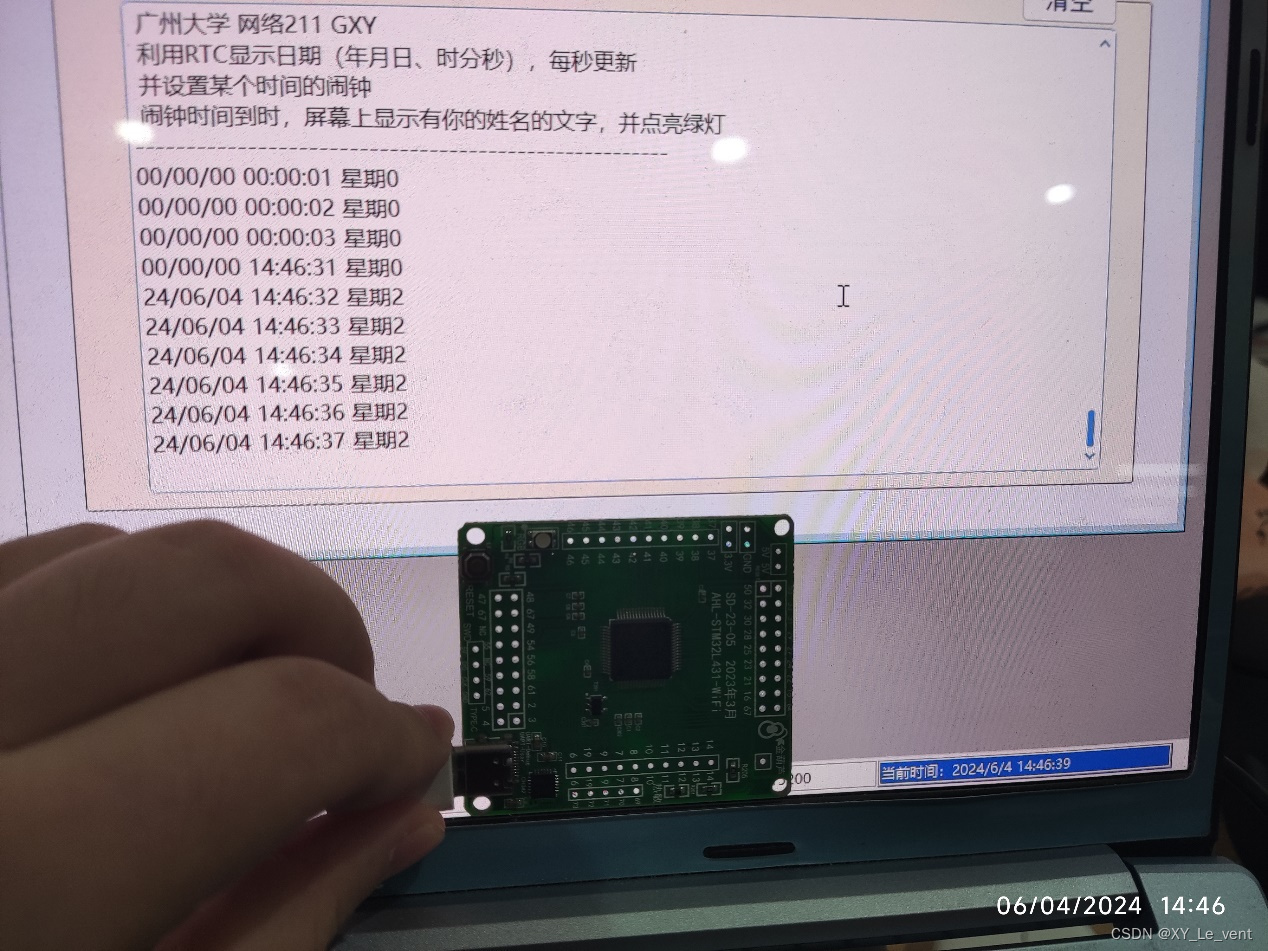
可以看到用测试程序更新RTC基准时间后,基本按照当前时间输出,有2s延迟
 可以看到闹钟时间到的时候,成功输出了我的班级和名字,并且点亮了绿灯,程序还在继续输出当前时间。
可以看到闹钟时间到的时候,成功输出了我的班级和名字,并且点亮了绿灯,程序还在继续输出当前时间。
3、利用PWM脉宽调制,交替显示红灯的5个短闪和5个长闪。
源代码:
main.c
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
int main(void)
{
//(1.1)声明main函数使用的局部变量
uint8_t mFlag; //灯的状态标志
uint8_t Flag; //希望采集的电平高低标志
double m_duty; //占空比
uint32_t m_i; //控制在未知周期内不同占空比的波形只打印有限次
uint8_t m_K; //确保每次能正确打印输出PWM波形
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
Flag=1;
mFlag=0; //灯的状态标志
//(1.5)用户外设模块初始化
gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_OFF); //初始化红灯暗
pwm_init(PWM_USER,1500,1000,10.0,PWM_CENTER,PWM_MINUS); //PWM输出初始化
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("------------------------------------------------------\n");
printf(" 广州大学 网络211 GXY \n");
printf(" 利用PWM脉宽调制\n");
printf(" 交替显示红灯的5个短闪和5个长闪\n");
printf("------------------------------------------------------\n");
m_K=0;
m_duty=10.0; //占空比设置为10%
for(;;)
{
pwm_update(PWM_USER,m_duty); //调节占空比
for (m_i=0;m_i<10;m_i++) //m_i<10为了控制小灯闪烁5次
{
m_K=0; //保证每次输出打印完整的PWM波,再进入下一个循环
do
{
mFlag=gpio_get(PWM_USER); //获取灯的状态标志
if ((mFlag==1)&&(Flag==1))
{
printf("高电平:1\n");
Flag=0;
m_K++;
gpio_reverse(LIGHT_RED);//小灯反转
}
else if ((mFlag==0)&&(Flag==0))
{
printf("低电平:0\n");
Flag=1;
m_K++;
gpio_reverse(LIGHT_RED);
}
}
while (m_K<1);
}
m_duty = 100.0-m_duty; //不断循环每5次灯闪烁调节占空比
}
}
运行结果:
VID_20240604_170542
可以看到5个短闪和5个长闪交替显示
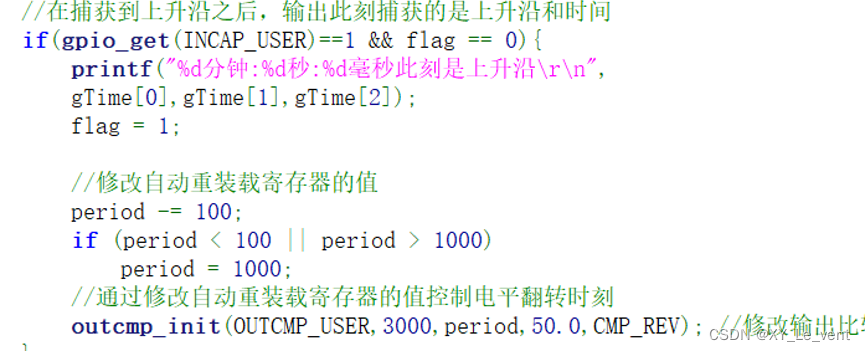
4、GEC39定义为输出引脚,GEC10定义为输入引脚,用杜邦线将两个引脚相连,验证捕捉实验程序Incapture-Outcmp-20211110,观察输出的时间间隔。
运行结果:
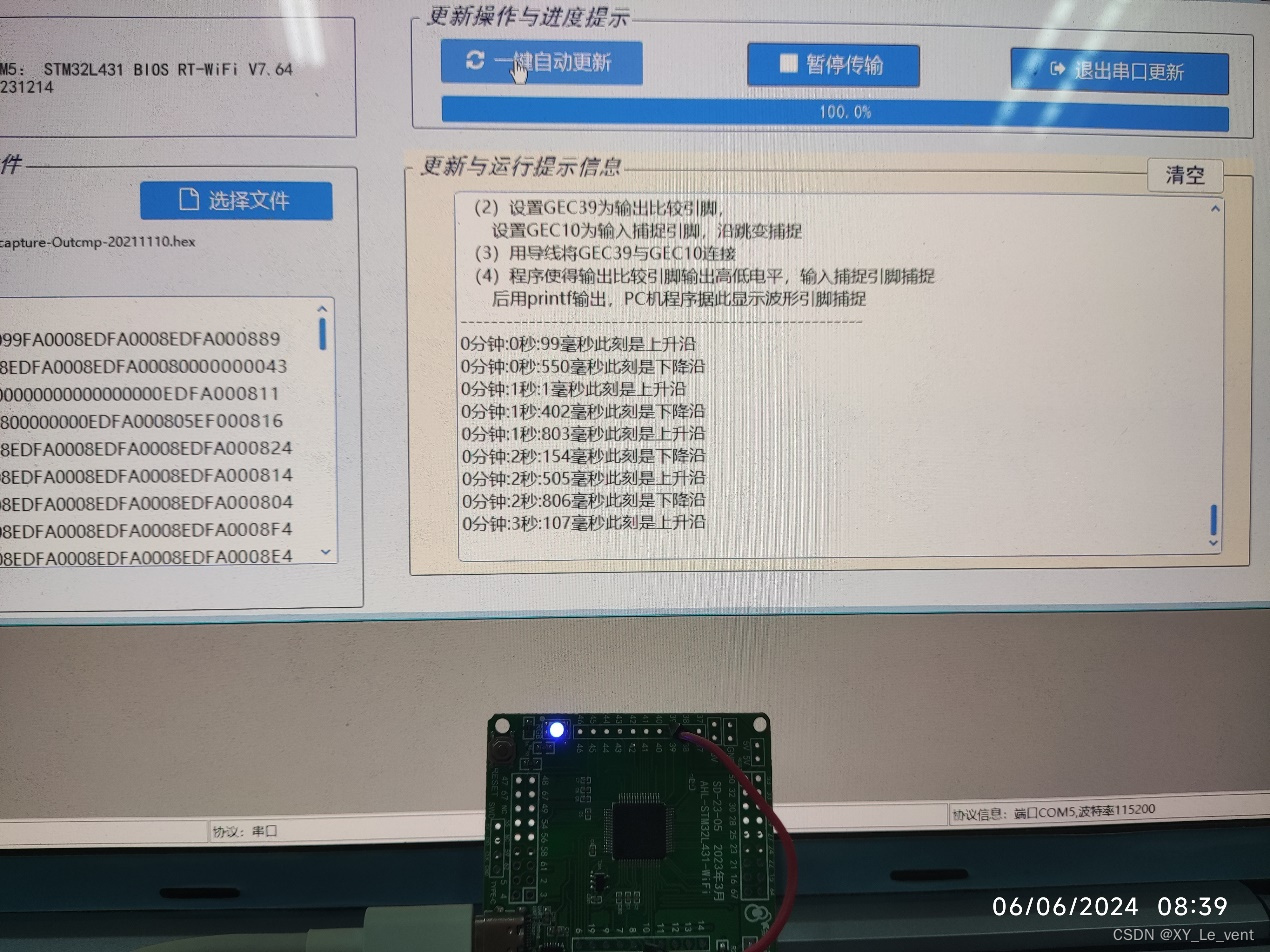
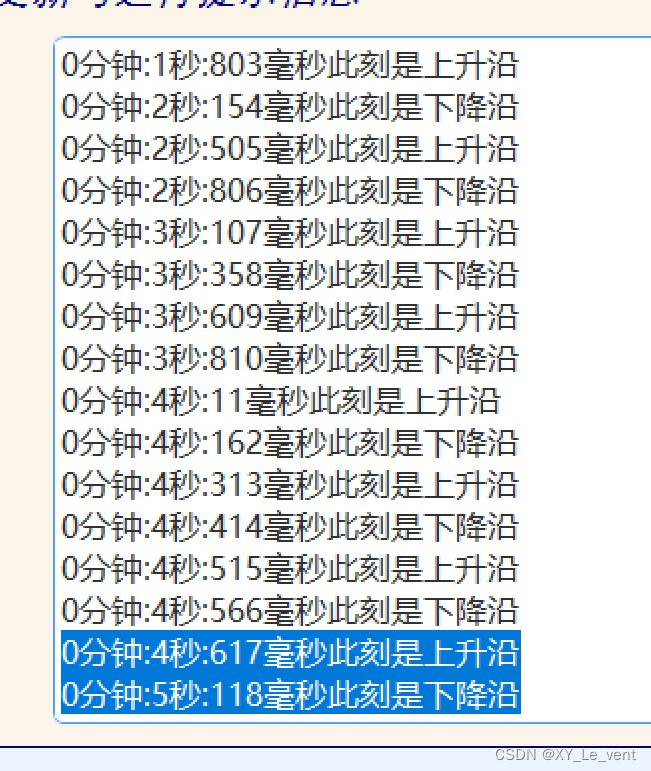
可以看到每触发一次上升沿,输出周期都会-100ms,小于100ms时重新设置为1000ms循环。















 273
273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









