






>- **🍨 本文为[🔗365天深度学习训练营](https://mp.weixin.qq.com/s/0dvHCaOoFnW8SCp3JpzKxg) 中的学习记录博客**
>- **🍖 原作者:[K同学啊](https://mtyjkh.blog.csdn.net/)**代码:
#%%
import matplotlib
import matplotlib.pyplot as plt
from torchvision.transforms import transforms
from torch.utils.data import DataLoader
from torchvision import datasets
import torchvision.models as models
import torch.nn.functional as F
import torch.nn as nn
import torch, torchvision
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
#%%
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
#%%
import os, PIL, random, pathlib
import matplotlib.pyplot as plt
# 支持中文
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
data_dir = './015_licence_plate/015_licence_plate'
data_dir = pathlib.Path(data_dir)
# print(data_dir)
data_paths = list(data_dir.glob('*'))
# print(data_paths)
classeNames = [str(path).split("\\")[-1].split("_")[1].split(".")[0] for path in data_paths]
print(len(classeNames))
print(classeNames)
#%%
data_paths = list(data_dir.glob('*'))
data_paths_str = [str(path) for path in data_paths]
data_paths_str
#%%
import os
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
plt.figure(figsize=(14, 5))
plt.suptitle("数据示例(K同学啊)", fontsize=15)
for i in range(18):
plt.subplot(3, 6, i + 1)
plt.xticks([])
plt.yticks([])
plt.grid(False)
# 显示图片
images = plt.imread(data_paths_str[i])
plt.imshow(images)
plt.show()
#%%
import numpy as np
char_enum = ["京", "沪", "津", "渝", "冀", "晋", "蒙", "辽", "吉", "黑", "苏", "浙", "皖", "闽", "赣", "鲁", \
"豫", "鄂", "湘", "粤", "桂", "琼", "川", "贵", "云", "藏", "陕", "甘", "青", "宁", "新", "军", "使"]
number = [str(i) for i in range(0, 10)] # 0 到 9 的数字
alphabet = [chr(i) for i in range(65, 91)] # A 到 Z 的字母
char_set = char_enum + number + alphabet
char_set_len = len(char_set)
label_name_len = len(classeNames[0])
# 将字符串数字化
def text2vec(text):
vector = np.zeros([label_name_len, char_set_len])
for i, c in enumerate(text):
idx = char_set.index(c)
vector[i][idx] = 1.0
return vector
all_labels = [text2vec(i) for i in classeNames]
#%%
import os
import pandas as pd
from torchvision.io import read_image
from torch.utils.data import Dataset
import torch.utils.data as data
from PIL import Image
class MyDataset(data.Dataset):
def __init__(self, all_labels, data_paths_str, transform):
self.img_labels = all_labels # 获取标签信息
self.img_dir = data_paths_str # 图像目录路径
self.transform = transform # 目标转换函数
def __len__(self):
return len(self.img_labels)
def __getitem__(self, index):
image = Image.open(self.img_dir[index]).convert(
'RGB') #plt.imread(self.img_dir[index]) # 使用 torchvision.io.read_image 读取图像
label = self.img_labels[index] # 获取图像对应的标签
if self.transform:
image = self.transform(image)
return image, label # 返回图像和标签
#%%
# 缺少
# 定义数据转换
train_transforms = transforms.Compose([
transforms.Resize([224, 224]), # 将输入图片resize成统一尺寸
transforms.ToTensor(), # 将PIL Image或numpy.ndarray转换为tensor,并归一化到[0,1]之间
transforms.Normalize( # 标准化处理-->转换为标准正太分布(高斯分布),使模型更容易收敛
mean=[0.485, 0.456, 0.406],
std =[0.229, 0.224, 0.225]) # 其中 mean=[0.485,0.456,0.406]与std=[0.229,0.224,0.225] 从数据集中随机抽样计算得到的。
])
total_data = MyDataset(all_labels, data_paths_str, train_transforms)
train_size = int(0.8 * len(total_data))
test_size = len(total_data) - train_size
train_dataset, test_dataset = torch.utils.data.random_split(total_data, [train_size, test_size])
train_size, test_size
#%%
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=16,
shuffle=True)
test_loader = torch.utils.data.DataLoader(test_dataset,
batch_size=16,
shuffle=True)
print("The number of images in a training set is: ", len(train_loader) * 16)
print("The number of images in a test set is: ", len(test_loader) * 16)
print("The number of batches per epoch is: ", len(train_loader))
#%%
for X, y in test_loader:
print("Shape of X [N, C, H, W]: ", X.shape)
print("Shape of y: ", y.shape, y.dtype)
break
#%%
class Network_bn(nn.Module):
def __init__(self):
super(Network_bn, self).__init__()
"""
nn.Conv2d()函数:
第一个参数(in_channels)是输入的channel数量
第二个参数(out_channels)是输出的channel数量
第三个参数(kernel_size)是卷积核大小
第四个参数(stride)是步长,默认为1
第五个参数(padding)是填充大小,默认为0
"""
self.conv1 = nn.Conv2d(in_channels=3, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn1 = nn.BatchNorm2d(12)
self.conv2 = nn.Conv2d(in_channels=12, out_channels=12, kernel_size=5, stride=1, padding=0)
self.bn2 = nn.BatchNorm2d(12)
self.pool = nn.MaxPool2d(2, 2)
self.conv4 = nn.Conv2d(in_channels=12, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn4 = nn.BatchNorm2d(24)
self.conv5 = nn.Conv2d(in_channels=24, out_channels=24, kernel_size=5, stride=1, padding=0)
self.bn5 = nn.BatchNorm2d(24)
self.fc1 = nn.Linear(24 * 50 * 50, label_name_len * char_set_len)
self.reshape = Reshape([label_name_len, char_set_len])
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = self.pool(x)
x = F.relu(self.bn4(self.conv4(x)))
x = F.relu(self.bn5(self.conv5(x)))
x = self.pool(x)
x = x.view(-1, 24 * 50 * 50)
x = self.fc1(x)
# 最终reshape
x = self.reshape(x)
return x
# 定义Reshape层
class Reshape(nn.Module):
def __init__(self, shape):
super(Reshape, self).__init__()
self.shape = shape
def forward(self, x):
return x.view(x.size(0), *self.shape)
device = "cuda" if torch.cuda.is_available() else "cpu"
print("Using {} device".format(device))
model = Network_bn().to(device)
model
#%%
import torchsummary
''' 显示网络结构 '''
torchsummary.summary(model, (3, 224, 224))
#%%
optimizer = torch.optim.Adam(model.parameters(),
lr=1e-4,
weight_decay=0.0001)
loss_model = nn.CrossEntropyLoss()
#%%
from torch.autograd import Variable
def test(model, test_loader, loss_model):
size = len(test_loader.dataset)
num_batches = len(test_loader)
model.eval()
test_loss, correct = 0, 0
with torch.no_grad():
for X, y in test_loader:
X, y = X.to(device), y.to(device)
pred = model(X)
test_loss += loss_model(pred, y).item()
test_loss /= num_batches
print(f"Avg loss: {test_loss:>8f} \n")
return correct, test_loss
def train(model, train_loader, loss_model, optimizer):
model = model.to(device)
model.train()
for i, (images, labels) in enumerate(train_loader, 0): #0是标起始位置的值。
images = Variable(images.to(device))
labels = Variable(labels.to(device))
optimizer.zero_grad()
outputs = model(images)
loss = loss_model(outputs, labels)
loss.backward()
optimizer.step()
if i % 1000 == 0:
print('[%5d] loss: %.3f' % (i, loss))
#%%
test_acc_list = []
test_loss_list = []
epochs = 30
for t in range(epochs):
print(f"Epoch {t + 1}\n-------------------------------")
train(model, train_loader, loss_model, optimizer)
test_acc, test_loss = test(model, test_loader, loss_model)
test_acc_list.append(test_acc)
test_loss_list.append(test_loss)
print("Done!")
#%%
import numpy as np
import matplotlib.pyplot as plt
x = [i for i in range(1, 31)]
plt.plot(x, test_loss_list, label="Loss", alpha=0.8)
plt.xlabel("Epoch")
plt.ylabel("Loss")
plt.legend()
plt.show()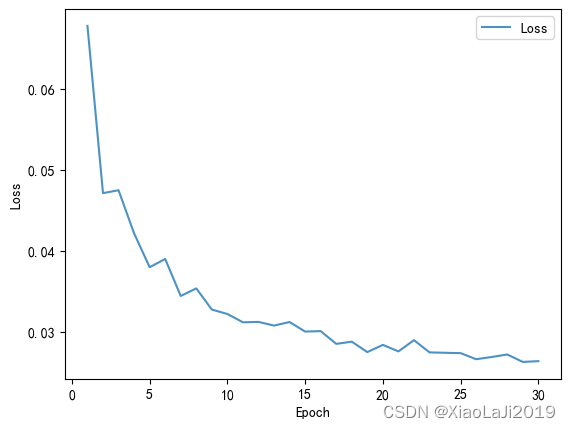
总结:
优点
- 有效特征提取:通过多层卷积层和池化层,可以有效提取图像的局部特征,并通过批归一化层提高训练的稳定性和收敛速度。
- 网络结构简单明了:设计简洁,层数适中,易于理解和实现。
- 合理的数据预处理:使用了标准的图像预处理方法(如归一化、尺寸调整),有助于模型的训练和性能提升。
- 适合小数据集:相对于深层网络,该结构更适合用于小数据集,训练速度快,避免过拟合。
缺点
- 泛化能力有限:网络层数较少,参数较少,可能限制了模型的表达能力,在更复杂的任务中可能表现不佳。
- 对噪声敏感:没有加入正则化手段,如 dropout,容易受到噪声的干扰。
- 适应性差:针对特定任务设计的网络,若应用于其他任务,可能需要重新调整和优化。
运行结果分析
从训练过程中损失曲线图来看,损失在训练初期迅速下降,在训练后期趋于平稳,说明模型在训练过程中不断学习和优化,逐渐收敛。最终损失稳定在一个较低的值,表明模型性能较好。具体结果如下:
- 训练效果:损失在前几个 epoch 下降迅速,之后缓慢下降,表明模型逐渐学习到了图像的特征。
- 收敛性:在第20个 epoch 左右,损失基本趋于平稳,说明模型基本达到了收敛状态。
综上所述,该模型适用于车牌识别任务,但在更复杂的场景或数据量较大的情况下,可能需要进一步优化模型结构和训练策略,以提高泛化能力和鲁棒性。
优化方向
-
增加网络深度
- 更多卷积层:增加卷积层的数量,以提取更高层次的特征。
- 残差网络(ResNet):使用残差块可以在增加网络深度的同时,缓解梯度消失的问题,提高模型的表达能力。
-
正则化手段
- Dropout:在全连接层或卷积层后使用 dropout,可以减少过拟合,提高模型的泛化能力。
- L2 正则化:在损失函数中加入 L2 正则化项,可以限制模型参数的大小,减少过拟合风险。
-
优化算法
- 学习率调度:使用学习率调度器,如阶梯式下降、余弦退火等,可以在训练过程中动态调整学习率,提升训练效果。
- 优化器选择:尝试不同的优化器,如 AdamW、RMSprop 等,选择最适合当前任务的优化器。
-
预训练模型
- 迁移学习:使用在大规模数据集(如 ImageNet)上预训练的模型,进行迁移学习,可以在小数据集上快速获得较好的性能。
- 微调(Fine-tuning):在预训练模型的基础上,对特定任务进行微调,以适应特定的数据集和任务。
-
模型集成
- 多模型融合:使用多种模型进行融合,如 bagging、boosting 等方法,可以提高模型的鲁棒性和泛化能力。
- 软投票:在预测阶段,使用多个模型的预测结果进行加权平均,提高预测的准确性。
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









