






自适应巡航Carsim+simulink联合仿真,两车仿真
不支持三车
固定间距,carsim纯电车,PID控制。
ACC固定间距策略。
ID:4990673554005978
青衫仗剑的温华

自适应巡航系统(Adaptive Cruise Control,简称ACC)是一种智能车辆控制系统,其能够根据前车的速度和距离自动调整车辆的巡航速度,以保持与前车的安全距离并减少驾驶员的负担。本文旨在介绍基于Carsim和Simulink联合仿真的自适应巡航系统,并探讨其中的关键技术。
在Carsim和Simulink这两个强大的仿真平台的配合下,我们可以进行准确的车辆控制系统仿真。而自适应巡航系统是其中一个重要的研究方向。然而,由于技术限制,当前的系统仅支持两车的仿真,不支持三车。因此,本文将聚焦于两车的仿真研究。
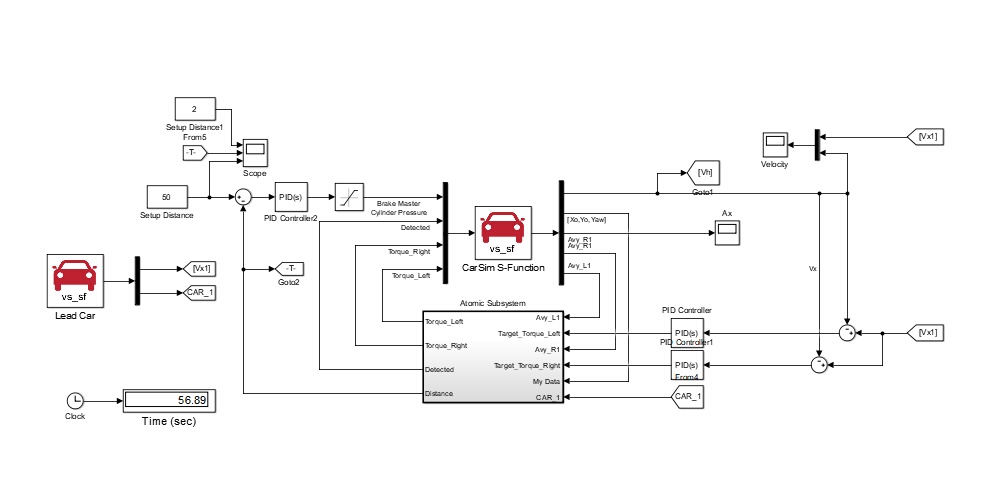
首先,我们介绍了Carsim作为纯电车的基础模型。Carsim是一种先进的车辆动力学仿真软件,其能够准确地模拟车辆的运动特性。在本文中,我们选取了纯电车作为研究对象,以探讨自适应巡航系统对电动车辆的影响。通过在Carsim中设置合适的车辆参数和动力学模型,我们能够得到准确的车辆动力学仿真结果。
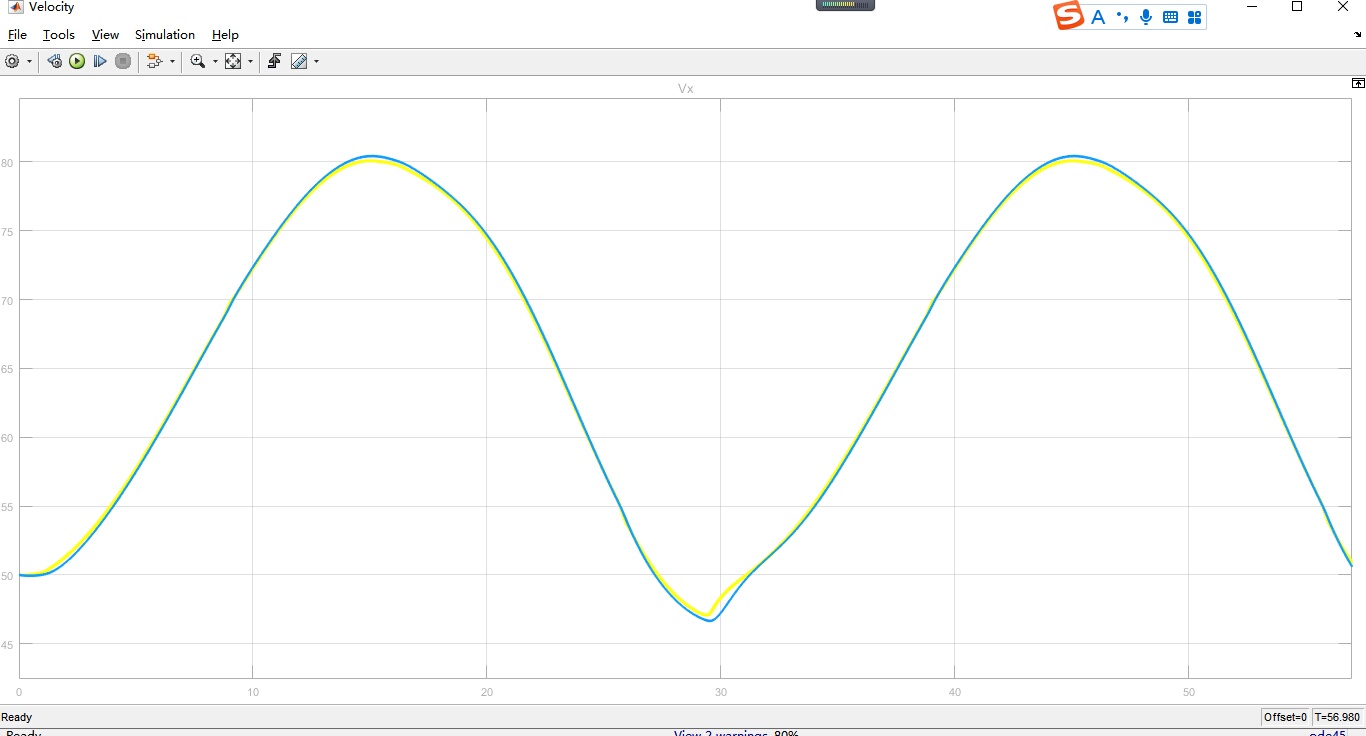
接着,我们引入了Simulink作为PID控制的仿真环境。PID控制是一种经典的控制算法,其通过不断调整输出信号来使系统的输出与期望值尽量接近。在自适应巡航系统中,PID控制器起到了关键的作用,能够根据前车的速度和距离动态调整车辆的巡航速度。通过在Simulink中设计和调整PID控制器的参数,我们能够实现高精度的速度控制,并保持与前车的固定间距。
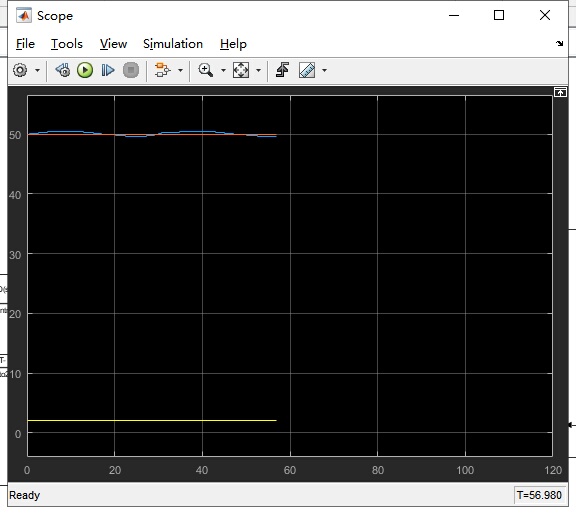
在ACC固定间距策略的实现中,我们借助了Carsim和Simulink的联合仿真平台。通过将Carsim中的车辆模型和Simulink中的PID控制器进行耦合,我们能够在仿真环境中实现ACC的固定间距策略。具体而言,我们将Carsim的输出作为Simulink中PID控制器的输入,从而实现对车辆速度的动态调节。通过对仿真结果的分析和评估,我们可以验证ACC固定间距策略的有效性和稳定性。
总之,本文介绍了一种基于Carsim和Simulink联合仿真的自适应巡航系统,重点讨论了两车的仿真研究。通过对纯电车的动力学仿真和PID控制的设计与调整,我们实现了ACC固定间距策略的仿真验证。然而,由于技术限制,本系统暂时不支持三车的仿真。未来的研究可以进一步探索三车的仿真,并在更多场景下应用自适应巡航系统的技术优势。
以上相关代码,程序地址:http://matup.cn/673554005978.html















 782
782











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









