






基于动态规划的路径规划和速度规划
参考apollo 的dp路径规划和速度规划
更新:增加cpp代码实现
ID:4675673547153229
autorobot
基于动态规划的路径规划和速度规划一直以来都是自动驾驶领域的研究热点。在这篇文章中,我们将探讨基于动态规划的路径规划和速度规划的原理和应用,并参考apollo的dp路径规划和速度规划来进行分析。
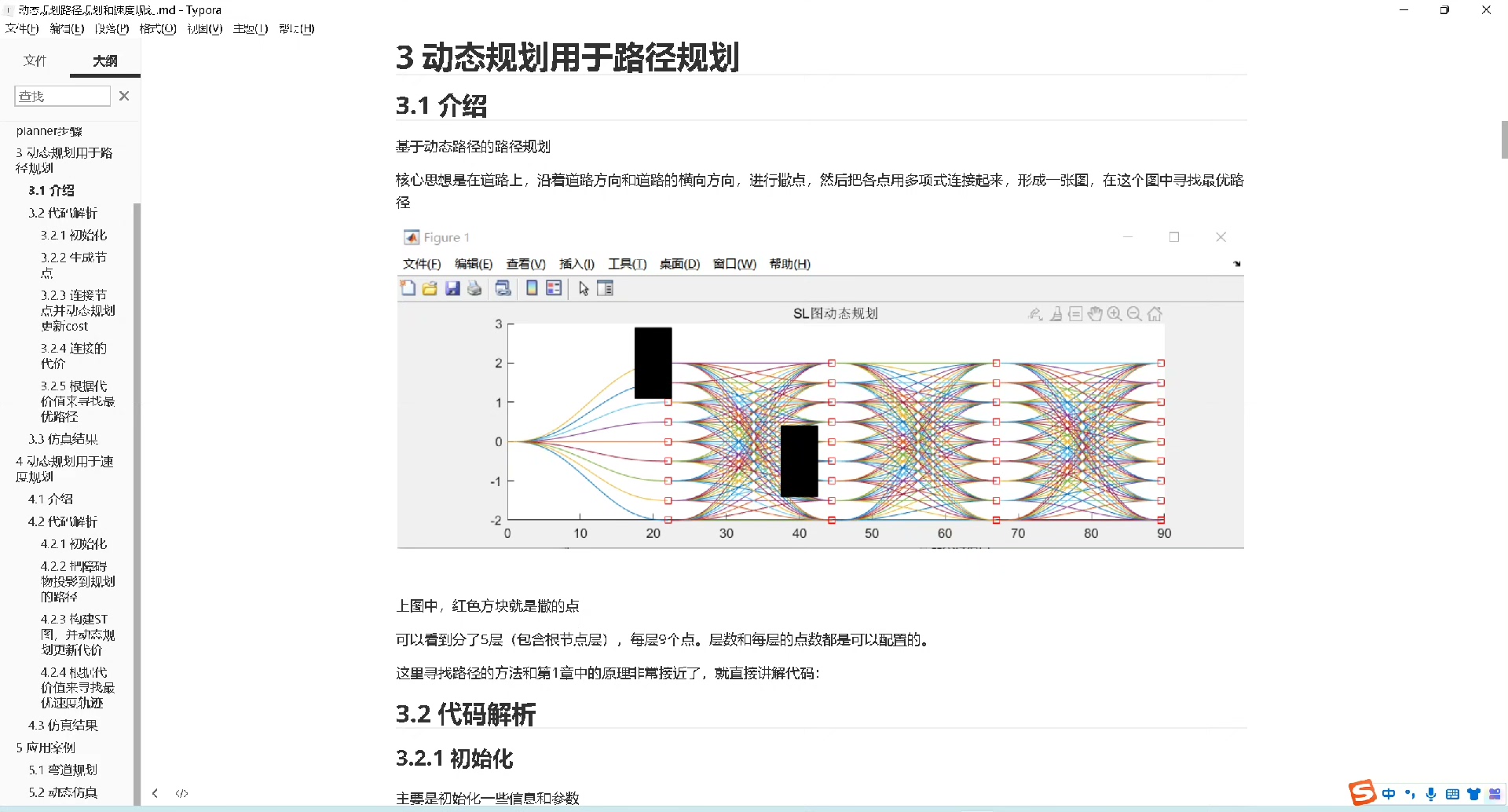
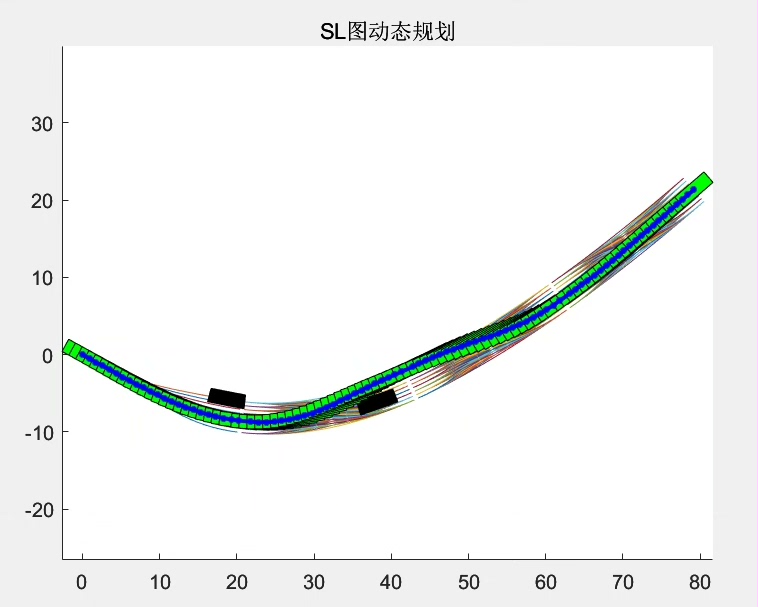
路径规划是自动驾驶系统中的核心任务之一。它的目标是在给定的地图和车辆状态下,找到一条最优的路径,使得车辆能够安全、高效地到达目的地。动态规划是一种常用的路径规划方法,它通过将整个路径划分为多个子问题,并逐步求解这些子问题的最优解,从而得到整个路径的最优解。在动态规划中,每个子问题的最优解都会对下一个子问题的解产生影响,因此需要综合考虑各个子问题的最优解。
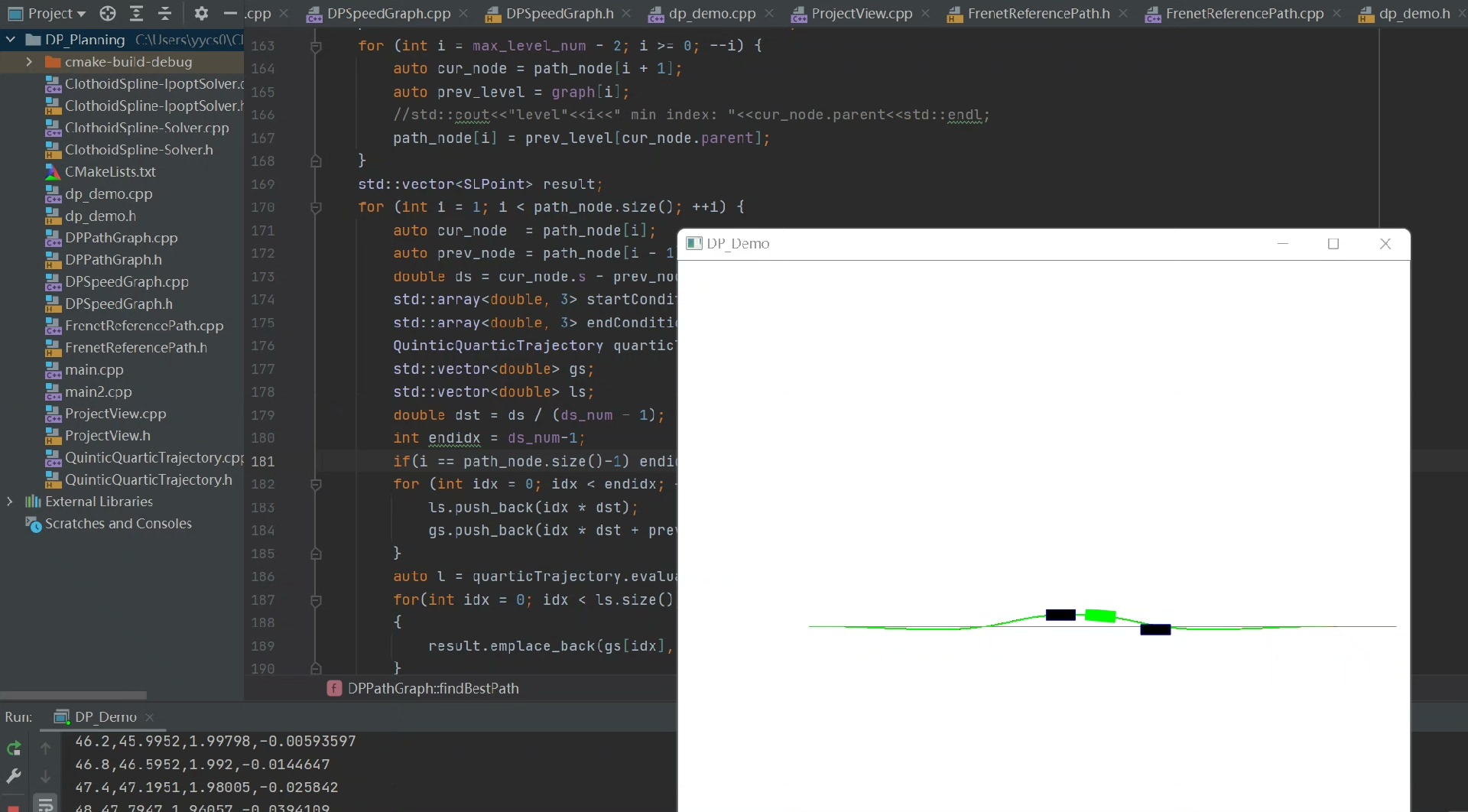
在apollo的dp路径规划中,路径被离散化为一系列的点。对于每个点,动态规划算法会计算到达该点的最优路径。具体而言,算法会通过遍历所有前驱点,并计算到达该点的代价函数,从而确定最优的前驱点和最小的代价。代价函数通常包括路径长度、车辆状态、路径曲率等因素,通过权衡这些因素来确定最优路径。在遍历过程中,动态规划算法会不断更新每个点的最优路径和最小代价,最终得到整个路径的最优解。
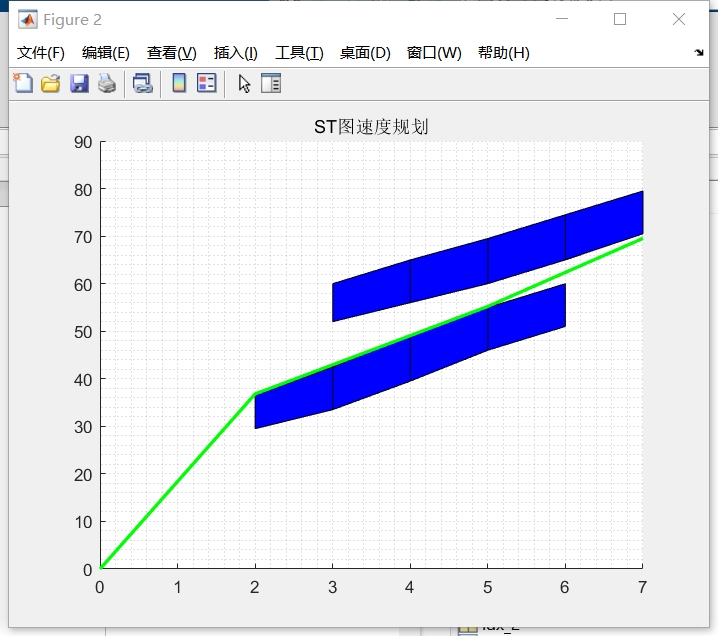
除了路径规划,速度规划也是自动驾驶系统中不可或缺的一部分。速度规划的目标是根据车辆的动态特性和道路的限制条件,生成一条安全、平稳的速度曲线,使得车辆能够按照规划的路径行驶。在动态规划中,速度规划通常被视为路径规划的附属问题,因为速度规划需要考虑路径的曲率、车辆的加速度限制、道路速限等因素。动态规划算法通过将速度规划问题离散化为多个子问题,并逐步求解这些子问题的最优解,得到整个速度曲线的最优解。
在apollo的dp速度规划中,速度被离散化为一系列的速度点。对于每个速度点,动态规划算法会计算到达该速度点的最优路径和最小代价。在计算过程中,算法会考虑车辆的加速度限制、路径的曲率、限速以及安全性等因素,通过动态规划的方法求解最优路径和最小代价。最终,得到整个速度曲线的最优解。
总结来说,基于动态规划的路径规划和速度规划在自动驾驶系统中扮演着重要的角色。动态规划通过将路径和速度离散化为多个子问题,并逐步求解这些子问题的最优解,从而得到整个路径和速度的最优解。通过参考apollo的dp路径规划和速度规划,我们可以深入了解动态规划的原理和应用。希望这篇文章能对读者在自动驾驶领域的研究和实践有所启发。
相关的代码,程序地址如下:http://wekup.cn/673547153229.html
















 413
413











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









