手持稳定云台的主要作用是将外界环境因数引起的相机姿态变化进行隔离。如因操作者运动造成的机体震动、风阻力矩等,为了确保工作中相机的视轴始终保持期望的姿态不动。云台相机要拍摄出高质量的影像最重要的就是保证相机的视轴相对目标保持稳定。因此在相机拍摄的过程中要求设备始终保持水平、匀速运动并且还要保持设备姿态的稳定。
本文采用了瑞芯微 RK3399 作为手持稳定云台控制系统的控制芯片,本文设计了云
台的机械结构且对云台进行了运动学分析、应用姿态融合算法最后对云台控制系统硬件
和软件进行设计。本文的主要内容为:
首先,根据常见的稳定云台多采用单姿态传感器且安放在目标载体上或者云台基座上。本设计针对手持稳定云台系统的结构和特点,采用双惯性传感器的安装方案,一个安装在载体相机上,另一个安装在与框架相连的电机上。同时介绍了稳定云台工作原理并进行了运动学分析。
然后,选用了三个无刷直流电机驱动云台,根据已知无刷直流电机的数学模型得出稳定云台俯仰框架控制模型。对常规 PID 控制方法和模糊自适应 PID 控制方法进行对比,通过分析比较最终选用了模糊自适应 PID 控制方法对云台控制系统进行仿真,并且在加入扰动输入下的仿真结果较常规 PID 控制方法具有更好的快。速性和稳定性。同时将经典卡尔曼滤波方法用于控制系统,对经典卡尔曼滤波算法在本设计上的应用MATLAB 进行仿真验证。
最后,对手持稳定云台系统硬件控制系统和软件控制系统进行设计设计了RK3399 外围电路板并介绍了无刷直流电机驱动原理和反电动势的零位检测方法;对手持稳定云台俯仰轴、横滚轴、方位轴工作条件下的姿态进行了实验验证。
系统整体结构概述
稳定云台系统主要由云台实体、控制器、传感器模块、电机驱动模块,同时系统还
有电源模块等辅助模块。稳定云台控制系统的核心就是云台控制芯片[51]。传感器模块主要目的是检测载体相机和云台基座的姿态数据并将数据实时传送给云台控制器。然后控制器将姿态传感器测量到的原始数据通过融合计算得到载体相机实际姿态角,最后控制器根据载体相机和云台基座的实际姿态和期望姿态的差值去驱动无刷直流电机动作使其载体相机达到期望姿态目标值。以下图 5.1 是云台控制板硬件设计图。
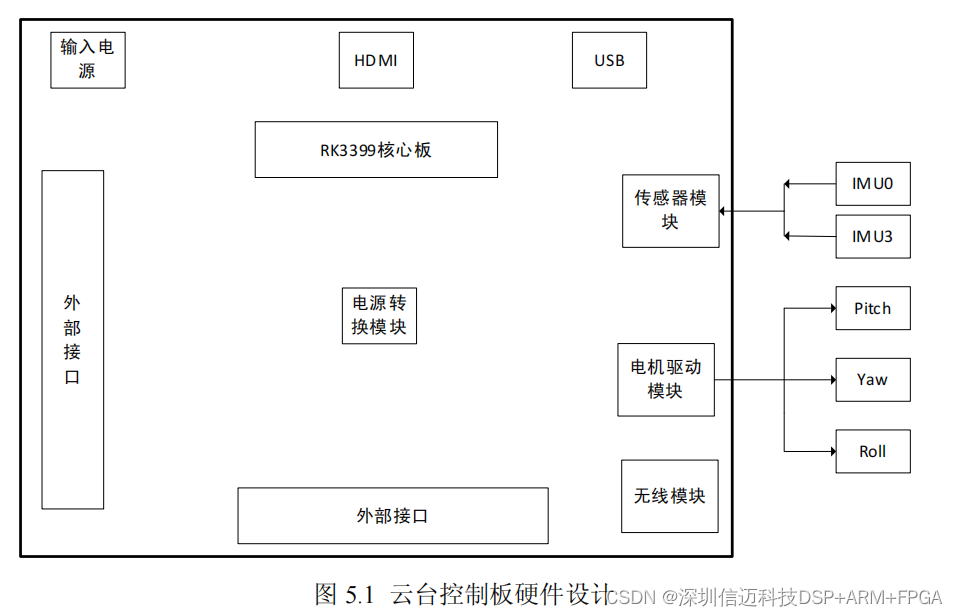
本设计选用的控制芯片为瑞芯微公司的 RK3399 芯片。云台控制板有两部分构成,
分别为核心板和外围板。系统使用的核心板是瑞芯微公司集成好的板子,而外围板是自
己绘制并定做的。本文将在
5.2
节详细介绍该芯片。控制板的硬件设计应用
Cadence
Allegro
绘制的
PCB
板,软件是基于
Ubuntu
系统下开发的。电源模块使用了俩个开关电
源芯片,其中
APW7080
作为系统
12V
变
5V
的稳压器件;
SP6205
作为系统
5V
变
3.3V
控制芯片。系统的两个
MPU6050
姿态传感器通过
IIC
接口与控制板相连。电机驱动模
块主要驱动三个无刷直流电机。控制板上集成了大量的外接口方便以后设备的功能扩展。
5.1.2
主控制芯片的选型及介绍
RK3399
是基于
Big.Little
大小核架构的低功耗高性能处理器,它包括双
Cortex-A72
、 4核
Cortex-A53
以及独立的
NEON
协处理器,可应用于计算机、手机、个人移动互联网, 数字多媒体设备。RK3399
内置多种功能强大的嵌入式硬件引擎,为高端应用提供了优 异的性能。支持多格式视频、高品质的JPEG
的编解码,以及特殊图像的预处理和后处理。
对整数、浮点、内存等作了大幅优化,在整体性能、功耗及核心面积三个方面都比较优秀;
支持双通道
DDR3-1866/DDR3L-1866/LPDDR3-1866/LPDDR4
最大能支持
4GB
的 内存空间;eMMC
则完全支持
JEDEC eMMC 5.1
标准,最大传输速率可达
3200Mbits
;拥有两个SD/MMC
接口,支持
SD3.0
及
MMC ver4.51
标准;
GPU
则采用
ARM
自家的新一代高端四核图形处理器Mali-T860MP4 GPU
,集成更多带宽压缩技术RK3399内置
3D GPU
,能够完全兼容
OpenGL ES1.1/2.0/3.0/3.1
、
OpenCL
和
DirectX 11.1。特殊的
MMU 2D
硬解码器能最大限度地提高显示性能,提供流畅的体验操作。 RK3399 具有高性能的双通道存储器接口(
DDR3/DDR3L/LPDDR3/LPDDR4
),能够提供高内存带宽,同时为应用提供了一套完整的外设接口。 本次试验采用的是信迈RK3399开发板作为验证。
RK3399
不仅在
CPU
与
GPU
上更为先进,瑞芯微
RK3399
处理器还具备以下独家 优势:
(1)
集成双
USB3.0 Type-C
接口,支持
Type-C
的
Display Port
音视频输出。
(2)
双
ISP
像素处理能力高达
800MPix/s
,支持双路摄像头数据同时输入,支持
3D
、
深度信息提取等高阶处理。
(3)MIPI/eDP
接口,支持
2560×1600
屏幕显示和双屏显示。
(4)HDMI2.0
接口、
H.265/H.264/VP9 4K@60fps
高清视频解码和显示。
(5)
内置
PCI-e
接口,支持基于
PCI-e
的高速
Wi-Fi
和存储扩展。
(6)
支持
8
路数字麦克风阵列输入
(7)
全面系统支持:兼容
Android
、
Linux
等操作系统
选用
RK3399
芯片主要是因为该芯片功能强大,考虑到后期需要对云台图片和视频进行处理所以选择了这个芯片。
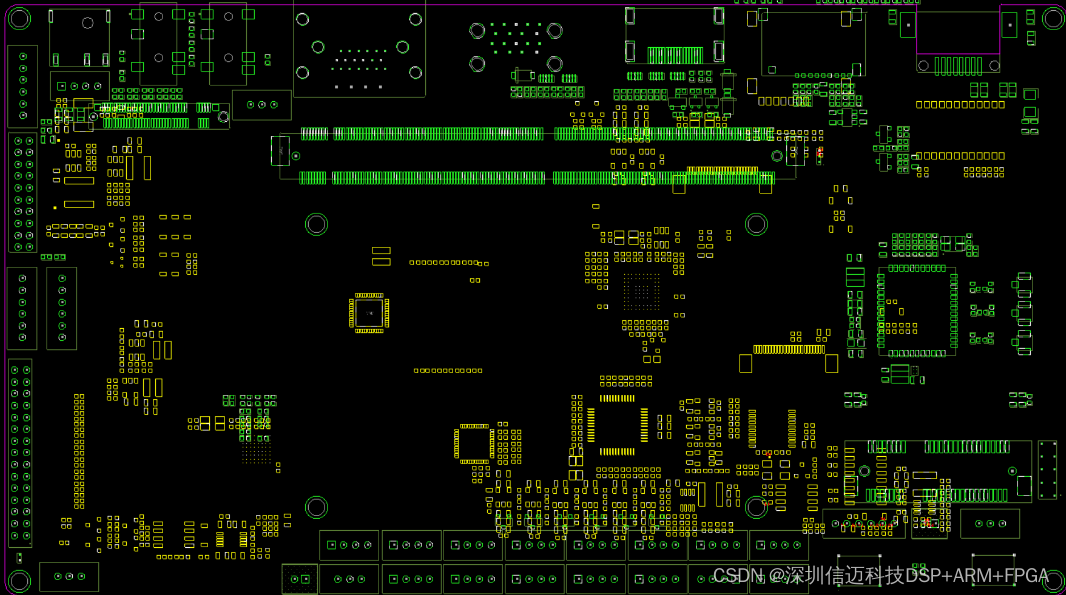
图 5.3 RK3399 外围板元器件布局
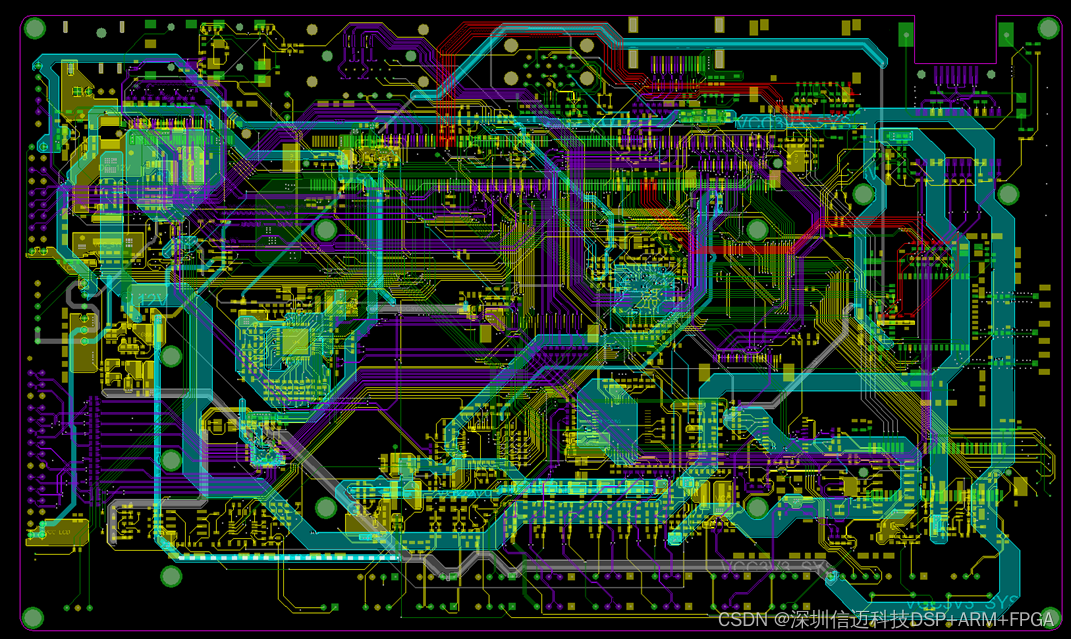 图 5.4 RK3399 布线图
图 5.4 RK3399 布线图
5.2.3
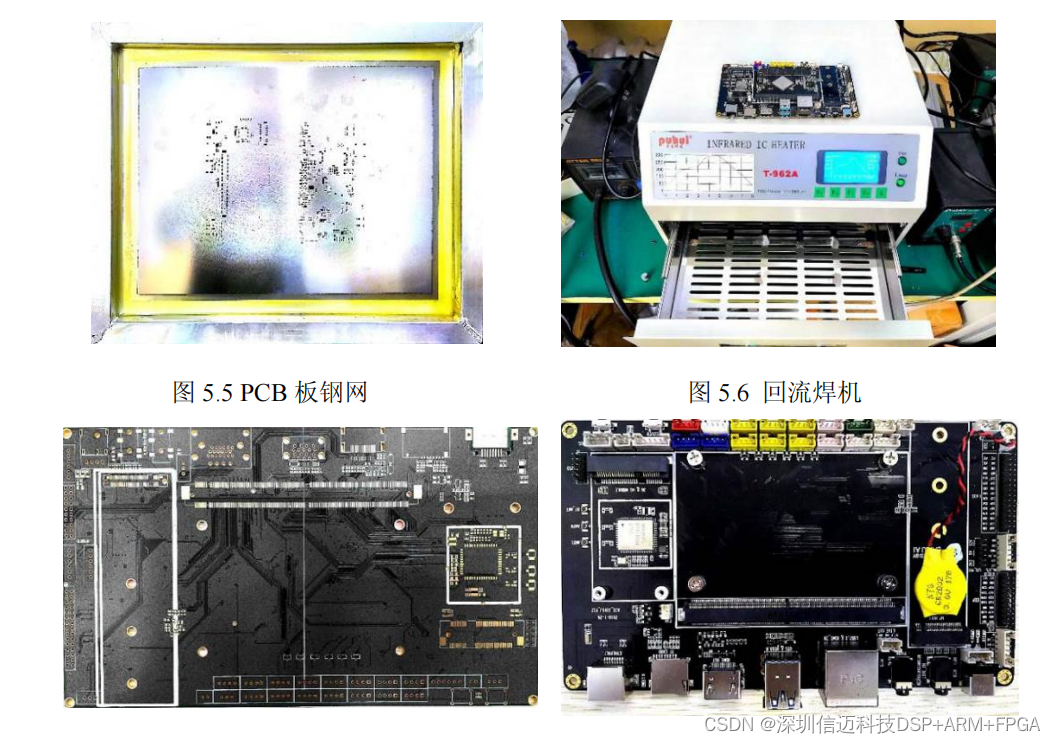
外围板元器件焊接机及调试
首先对电源模块进行焊接和调试,因为电源是整个开发板能否正常使用的最关键因素。主要策略就是边焊接边测试。在焊接电源降压芯片后测试降压后的 5V
和
3.3V
电压满足系统要求。然后分别开始焊接无线模块,电机驱动模块、传感器模块等。因板子元器件过多选用的元器件封装又很小(如电阻 0402
大小的封装)手动焊比较麻烦。在测得功能可用后证明 PCB
设计没重大缺陷,然后应用回流焊机对整版元器件进行焊接。回流焊机焊接后的板子比较漂亮美观。在摆放元器件时需要应用钢网在 PCB
裸板上涂锡膏然后摆放元器件后放入回流焊机中。如图 5.5
和图
5.6
所示分别为
PCB
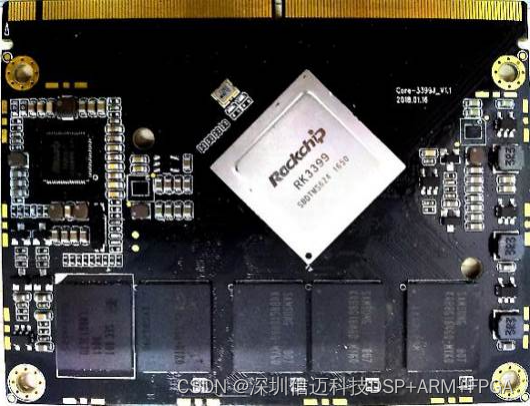
钢网和回流焊机制,如图 5.7
和图
5.8
分别为
RK3399
外围板裸板图和应用回流焊机焊接元器件后的 RK3399
正面图。从图
5.8
可以看出
RK3399
外围板外接扩展口很多,但很多本设计
未应用。
5.3
无刷直流电机选型及驱动模块设计
5.3.1
无刷直流电机的选型
电机驱动模块主要有电机和电子调速器组成。本设计的稳定云台选用的是无刷直流电机,无刷直流电机相比一般电机优点众多。无刷直流电机拥有传统的直流电机良好的调速性能的同时又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。无刷直流电机以电子换相器代替了有刷直流电机的机械换向器,摆脱了有刷直流电机的先天性缺陷。
根据系统承载重量和稳定性要求云台选用可承载
800g-1000g
重量有大扭矩的电机。 本设计选用的俯仰框架电机,
横滚框架电机和方位框架电机选用的是同型号的无刷直流 电机其型号为 GBM5208H-200T
,如下图
5.9
所示。该电机
KV
值较小,绕组匝数相对较多,最高输出电流小,扭矩较大,运行转速较低比较适合稳定云台实际运行情况。
5.3.2
无刷直流电机驱动电路设计
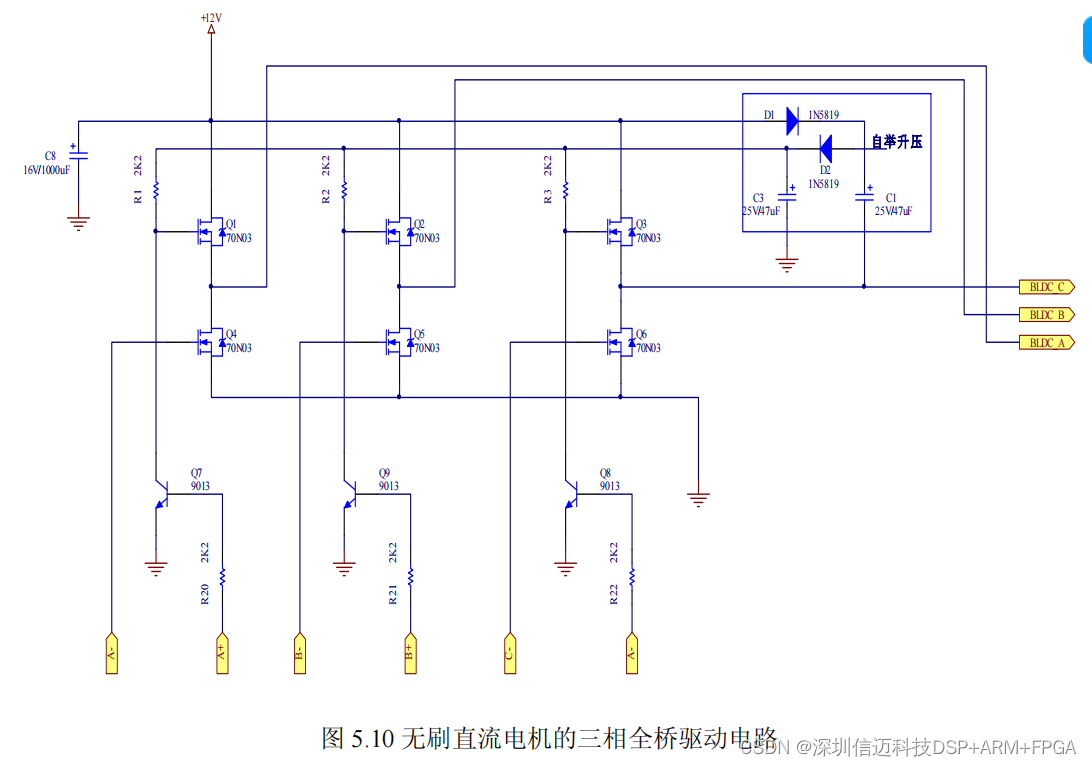
无刷直流电机控制方式和交流同步电机相似。只是电机换相方式由机械换相变为子换相而已。直流电机的调速是用直流电压来控制的。但是选用的控制板并不能输出可 调的直流电压。因此本设计采用 PWM
方法来控制电机的输入电压。
PWM
占空比与等 效电压成正比。但是 RK3399
控制器给出的
PWM
波形只是控制信号且最高电压也只有 5V,而设计选用的电机额定工作电压是
11.1V
。可见由控制器输出电压不足以驱动无刷 直流电机,且电机正常工作时需要较大的驱动电流所以设计了一个无刷直流电机驱动器。 无刷直流电机驱动器选用的功率管是 MOSFET
(场效应管)。如图
5.10
所示为无 刷直流电机的三相全桥驱动电路,从图中可以看到该电路使用了 6
个
N
沟道的场效应管 做功率输出元件。场效应管正常工作时输出电流可达到 10
安培。一般把
Q1
、
Q2
、
Q3 称作驱动桥的“
上臂
”
,
Q4
、
Q5
、
Q6
称作驱动桥的
“
下臂
”
。 图中 R1
、
R2
、
R3
三个电阻分别为
Q1
、
Q2
、
Q3 场效应管的上拉电阻。他们分接二极 管和电容。这样就组成的倍压整流电路,其可以为上臂驱动管提供电源电压两倍的电压,这样上拉电阻使上臂场效应管在工作时有足够高的 压差,从而降低场VGS效应管大电流输出时的导通内阻。MOS 管的栅极分别由Q7、 Q8、 Q9 驱动,在工作时可以起到换相的作用。下臂 MOS管由 MCU 的 PWM 输出接口直接驱动。这里需要注意的是,所选用的 MCU 的 GPIO 口需要有推挽输出功能。
驱动桥全部选用
N
沟道的
MOSFET
的好处:
(
1
)此型号场效应管型号多,货源足便于购买;
(
2
)从图
5.7
可以看到上臂场效应管经过
Q7、 Q8、 Q9
驱动逻辑电平后和下臂场效 应管刚好相反。这样的好处在于当 MCU
上电时
I/O
状态默认为
1
,上臂场效应管不会 导通,只有下臂场效应管会导通。因此消除了安全隐患。
5.4
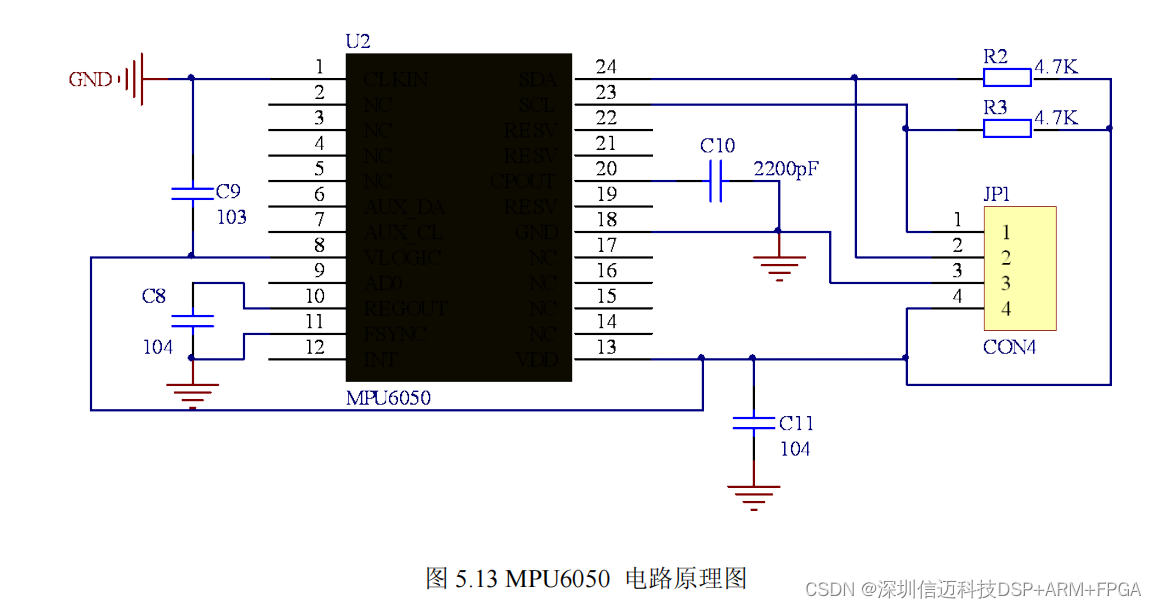
姿态传感器模块的选型
本系统选用的姿态传感器是
INVENSENSE
公司的
MPU6050
此传感器功能强大精
度符合系统需要而且价格便宜。如图
5.13
所示为
MPU6050
的内部电路图。它集成了
3
轴
MEMS
陀螺仪
3
轴
MEMS
加速度计,同时还有一个可扩展功能可以外加第三方传感
器。比如磁力计或者气压计可通过
IIC
总线外置第三方传感器。
MPU6050
带有
16
位
ADC
和信号调理的三轴
MEMS
速率陀螺仪传感器和具有
16
位
ADC
和信号调理的三轴
MEMS
加速度计传感器。它可以将测量得到的模拟量转换为
数字量。
陀螺仪具有
131LSBs/°/sec
的敏感度与全格感测范围为
±250
,
±500
,
±1000
,
±2000°/sec
,可以根据精度需要选择合适的范围。加速度计的测量精度有
±2g
,
±4g
,
±8g
,和
±16g
。选择
MPU6050
另一个原因就是选择组合了的陀螺仪和加速器,减少封装
时间应该更佳方便。同时该芯片还内嵌了一个温度传感器和在工作环境下仅有
±1%
变动
的振荡器。
MPU6050
上的
SCL
和
SDA
是连接
MCU
的
IIC
接口,
MCU
通过这个接口来控制
MCU6050
,另外还有一个
IIC
接口:
AUX_CL
和
AUX_DA 用来连接上文所说的第三方
传感器,本设计没有采用第三方传感器所以这个接口没有用到。在这里需要强调的是
IIC
总线与始终线应通过上拉电阻接到电源正极。
信迈提供RK3399定制化解决方案。


























 4788
4788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









