







把矩阵看作是运动,对于运动而言,最重要的当然就是运动的速度和方向
- 特征值就是运动的速度
- 特征向量就是运动的方向
说明下,因为线性变换总是在各种基之间变来变去,所以我下面画图都会把作图所用的基和原点给画出来。
在
i
⃗
,
j
⃗
\vec i,\vec j
i,j下面有个向量
v
⃗
\vec v
v :
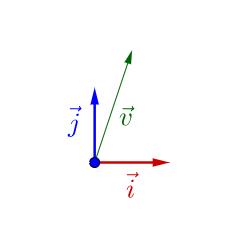
随便左乘一个矩阵
A
A
A,图像看上去没有什么特殊的:
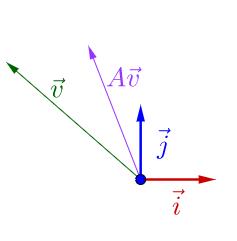
我调整下
v
⃗
\vec v
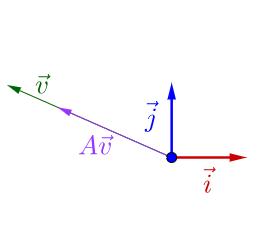
v 的方向,图像看上去有点特殊了:
可以观察到,调整后的
v
⃗
\vec v
v和
A
v
⃗
A\vec v
Av在同一根直线上,只是
A
v
⃗
A\vec v
Av的长度相对
v
⃗
\vec v
v的长度变长了。
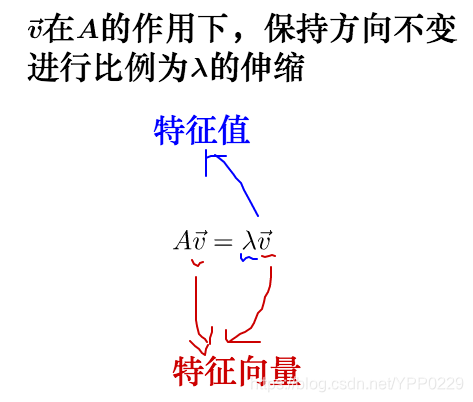
此时,我们就称 v ⃗ \vec v v是 A A A的特征向量,而 A v ⃗ A\vec v Av 的长度是 v ⃗ \vec v v的长度的 λ \lambda λ 倍, λ \lambda λ 就是特征值。
从而,特征值与特征向量的定义式就是这样的:
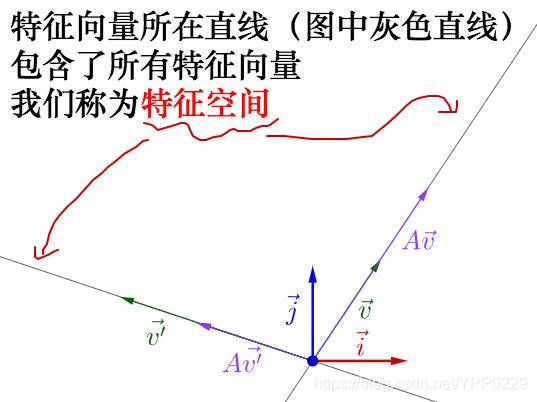
其实之前的
A
A
A 不止一个特征向量,还有一个特征向量:
容易从
A
v
⃗
A\vec v
Av 相对于
v
⃗
\vec v
v 是变长了还是缩短看出,这两个特征向量对应的特征
λ
\lambda
λ 值,一个大于1,一个小于1。
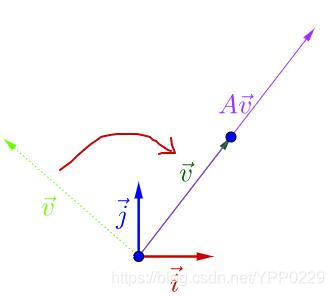
从特征向量和特征值的定义式还可以看出,特征向量所在直线上的向量都是特征向量:
一般来说,矩阵我们可以看作某种运动,而二维向量可以看作平面上的一个点(或者说一个箭头)。对于点我们是可以观察的,但是运动我们是不能直接观察的。
就好像,跑步这个动作,我们不附加到具体的某个事物上是观察不到的,我们只能观察到:人跑步、猪跑步、老虎跑步、…,然后从中总结出跑步的特点。
所以,要观察矩阵所代表的运动,需要把它附加到向量上才观察的出来:
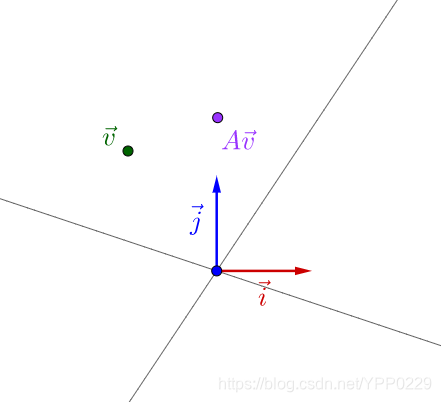
似乎还看不出什么。但是如果我反复运用矩阵乘法的话:
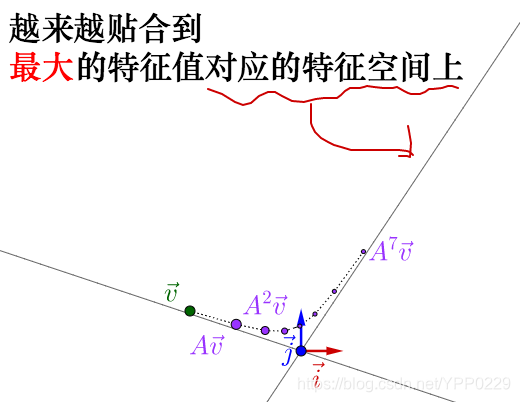
就像之前颜料混合一样,反复运用矩阵乘法,矩阵所代表的运动的最明显的特征,即速度最大的方向,就由最大特征值对应的特征向量展现了出来。
本文内容,均转载自“马同学高等数学”微信公众号,从知乎追到微信,真的受益颇多!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









