







1.目 的
1. 熟系智能车的组成结构;
2. 掌握智能车的底盘搭建与整车组装调试。
2.实验仪器及设备
1. 使用64位Windows操作系统的电脑,并安装好Xshell软件;
2. 已部署好ROS Melodic开发框架的虚拟机Ubuntu系统;
3. mRobotit小车套件。***
3.内 容
1. 组装 mRobotit 小车硬件;
2. 烧录 mRobotit 小车软件;
3. 键盘控制 mRobotit 小车运动。
4.步骤
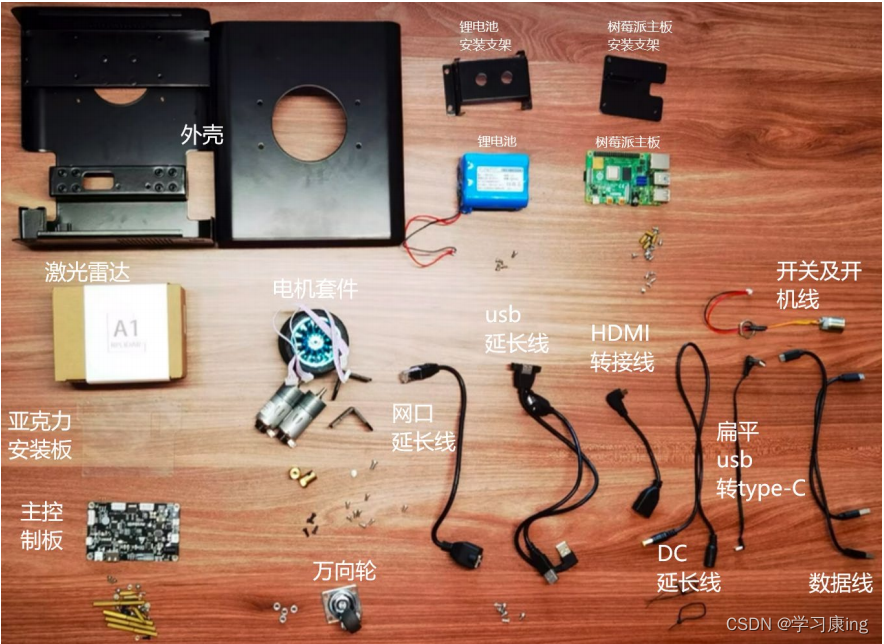
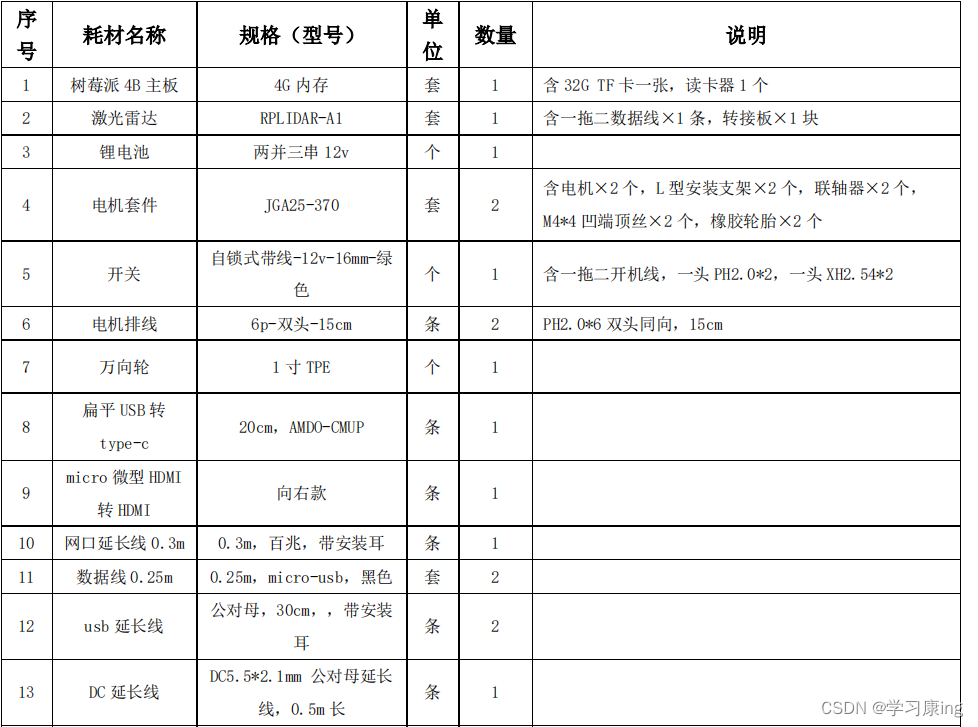
(一)清点配件和工具
mRobotit小车主要器材如下图所示:
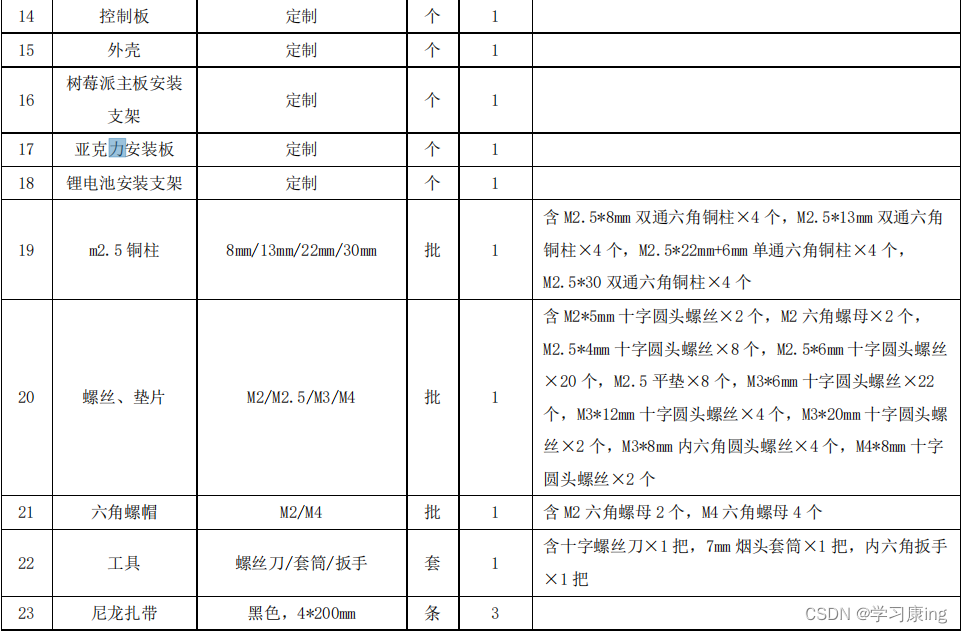
工具表:
(二)小车硬件组装
1.树莓派、激光雷达、控制板组件安装
按照视频“2、树莓派、激光雷达、控制板组件安装”完成安装。
1.1 树莓派安装
器材如下图所示。

安装好的效果如下图所示。

1.2 激光雷达安装
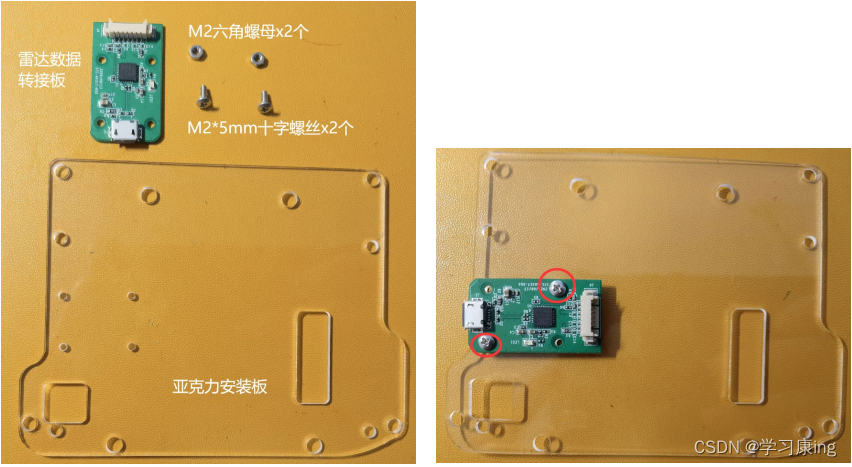
1.2.1 安装数据线
安装前后的效果图如下:

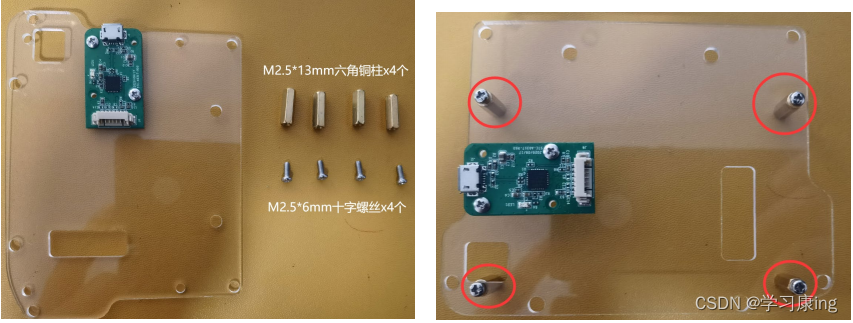
雷达数据转接板与亚克力板的安装过程如下图所示:
给亚克力板安装M2.513mm双通六角铜柱,安装过程如下:
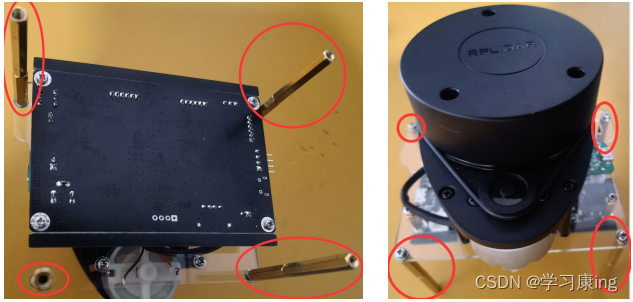
将雷达安装在压力板上,安装过程如下:

将控制板安装在亚克力板上,安装过程如下:

给亚克力板安装M2.522+6mm单铜六角铜柱和M2.5*30mm双通六角铜柱,安装过程如下: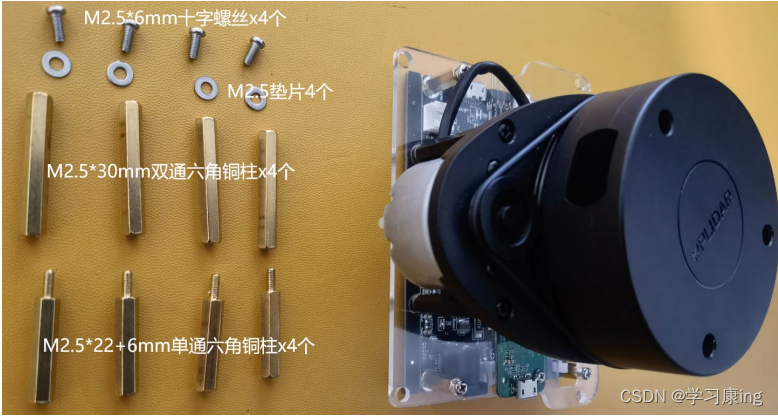
2.底盘安装
按照视频“3、底盘轮子安装”完成安装。
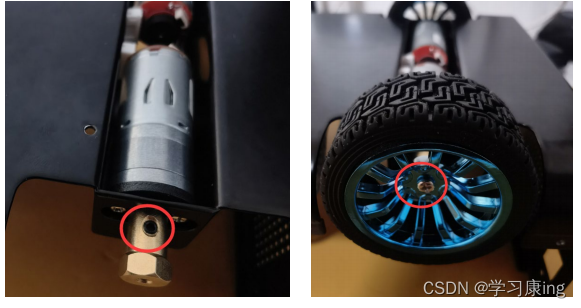
2.1 安装万向轮

2.2 安装驱动轮
安装过程如下:


3.小车整体组装
按照视频“4、mRobotit整体组装”完成安装。
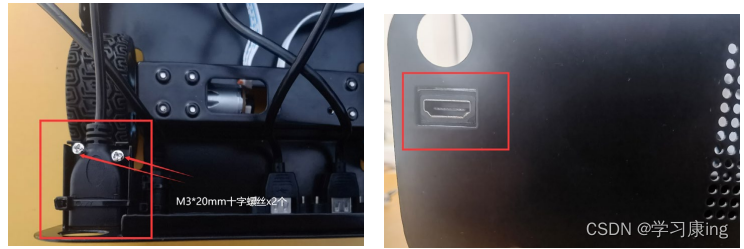
3.1 安装后面板延长线


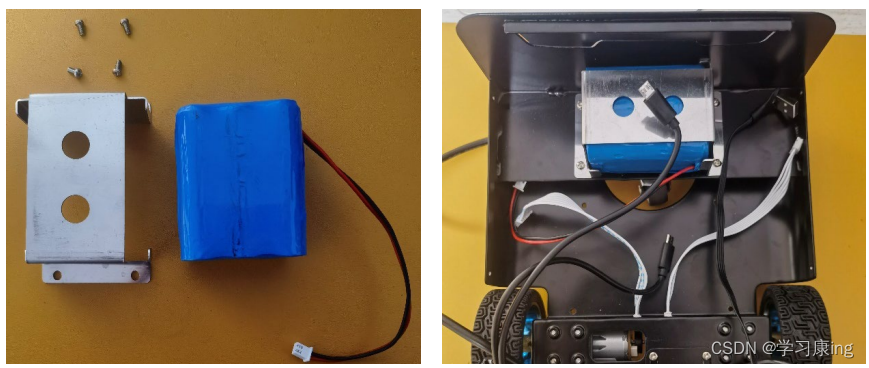
3.2 安装锂电池及其支架
3.3 安装树莓派主板及其支架(注意安装前先接好网线和USB延长线)
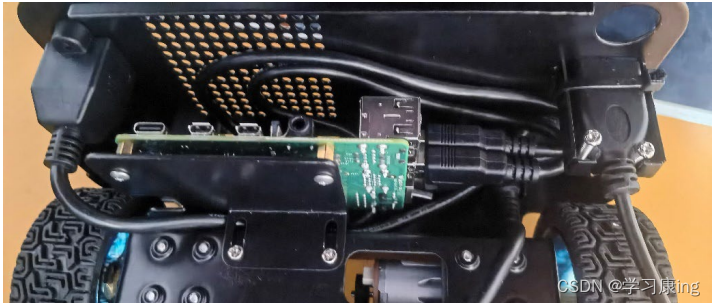
插好扁平USB转Type-C线、micro HDMI转HDMI线。
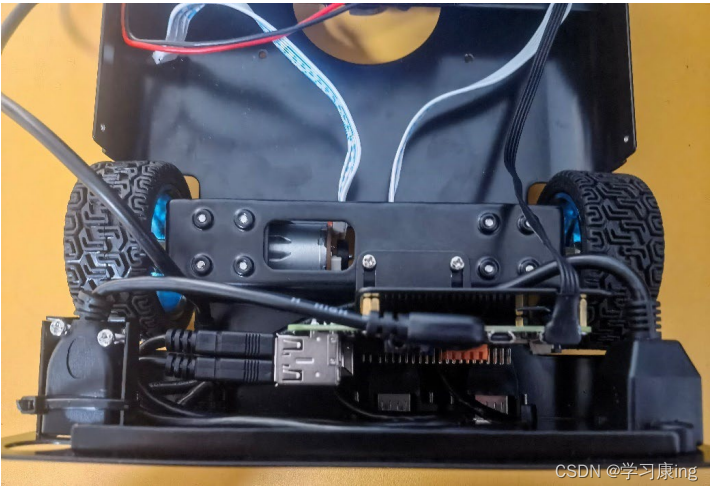
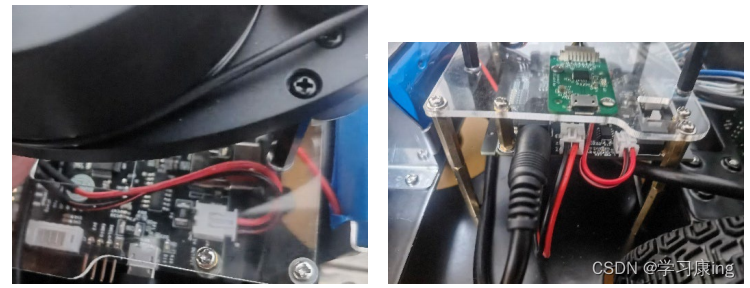
3.4 安装雷达和控制板模块

3.5 接好开关和各类连接线


这里就是车子的安装了,下一篇将为大家展示小车tf卡镜像,以及ros系统对小车的调试运行。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









