







 本文是关于智能车完全模型寻路算法的教程,从提出需求、识别道路线与标识、给出运动方向等方面进行讲解。针对算力有限的硬件,推荐使用传统视觉算法,并介绍了语言基础、OpenCV、开发环境搭建等步骤,最后展示了图像预处理的灰度二值化操作。
本文是关于智能车完全模型寻路算法的教程,从提出需求、识别道路线与标识、给出运动方向等方面进行讲解。针对算力有限的硬件,推荐使用传统视觉算法,并介绍了语言基础、OpenCV、开发环境搭建等步骤,最后展示了图像预处理的灰度二值化操作。
有手就行的智能车视觉寻路算法
前言
被同学拉进了智能车完全模型组做智能车的上层视觉软件算法,在交流群里吹水很多人起哄说让写一篇博客来教他们怎么写寻路。众望所托,今天就开始了这一系列的更新,保证有手就行,从最基础的开始。
其它的话:距离上次更新数据结构博客也很久了,那个博客并没有鸽,在复习二叉树的时候感觉这东西没啥好写的,和链表一样,而后面一直在看算法方面的东西,所以没有更新,后面的树状数组等等都会有更新的。
一、提出一份完整的需求
一份需求一定要层层细分:
最笼统的需求
- 能够识别道路线
- 能够识别道路标识
- 能够给出运动方向
- 特殊任务状态下的寻路
- 使用json控制一些变量的输入,方便后期调车
- 不重要:图形化界面,修改json文件并查看小车实时状态;使用socket等远程实时调试小车
这些就是最笼统的概念,接下来要细分到每一个部分上去:
识别道路线
识别道路线会遇到多种情况,包括直路,左右转弯,十字路口,环岛。
- 精确的识别出直线
- 判断出左右转弯状态
- 十字路口优化,单独处理十字路口
- 环岛入环,出环等状态的判断
识别道路标识
道路标识识别方法比较单一,只能是检测到目标然后进行图像分类确定标识种类。这就是需求了。
方案直接在这里给出:
- 直接使用目标检测算法,如yolo。但是效率会低,选择哪种算法请自行考虑。
- 传统图像算法优化目标检测,通过图像处理去到标识物的最小正接矩形范围,提取出图片,通过图像分类算法直接得到标识类别。
方便起见,直接选择方案一绝对是最好的,如果想要提升帧率,可以考虑借鉴方案二,或者自己找到其它更优解也是可以的。
给出运动方向
这里需要通过数学方法计算出小车后面需要行进的方向,具体如下
- 获得小车行进路线状态
- 数学方法处理路线,如拟合成直线等
- 通过斜率等判断转向度数
- pwm
- 串口传输pwm舵机打角信息
特殊任务
根据比赛规则自行调试,这里暂时不写需求
json文件
- 编写json文件读取协议
- 通过读取json文件初始化程序配置
本教程只针对基础寻路部分进行教学
二、板子的算力限制
这块板子真的是算力有限,只能说比树莓派强。在这样算力有限的情况下要是想跑yolov5或者一些图像分割算法的话那肯定是很难的,帧数很低,做人脸识别还可以,但是做这种实时高速识别的东西确实不太好。
因此,对于道路的识别我们要采用传统视觉算法。
三、从零开始
从零开始我们要先知道需要的一些基础技术,好进行学习。
1. 语言基础
推荐学习C/C++,python可针对深度学习单独学习。
推荐教程:
黑马程序员匠心之作|C++教程从0到1入门编程,学习编程不再难
从0基础系统化学习C++,不可能学不会
MOOC浙大翁恺C语言
菜鸟教程python
2. OpenCV部分
用啥建议直接百度,最好谷歌,有一些问题上stackoverflow也有解,注意搜索的姿势就行(
如果是想了解一下,这里推荐看贾志刚老师的教程(网上很多,就不放链接了),但是很容易困,稍微了解下,剩下的慢慢学,用到的算法我都会写是怎么回事。
3. 开发环境搭建
对于大型项目,尤其是需要放到linux上的,我更倾向于使用Clion来编写,当然vs也是不错的,vscode可以用,就是有点费劲。
因此我选取Clion作为我开发这个寻路程序的IDE。
有了IDE,接下来就该了解一下需要配置什么环境:
首先是C++编译环境,Clion上建议使用CMake,它也会帮你生成CMakeLists.txt这个文件,同时我的CMake用的是clang++编译器,还可以选择g++等,可以自己选择编译器。
有了C++的编译环境,需要配置OpenCV库,EB板子自带一个低版本OpenCV,如果直接在上面开发可以直接看一下怎么用就行了。如果想在自己电脑上调试的话,可以百度,有很多教程,每个人遇到的问题都不一样,但是网上基本都有解了。
串口通讯库,可能会需要,也可能自己写。
额外的,为了后面读取json文件,需要选择一个json解释器的库,这个暂时不谈。
有可能自己需要一个日志系统,选择自己喜欢的日志库就行。
图形库可以暂时不做,因此不装了先。
总结下来就是下面这些:
- IDE
- C++编译器
- CMake帮助编译大型项目
- OpenCV环境
- 串口库(可能需要)
- json解释器(暂时不用管)
- 日志库(暂时不用管)
- 图形库(暂时不用管)
4. 创建项目
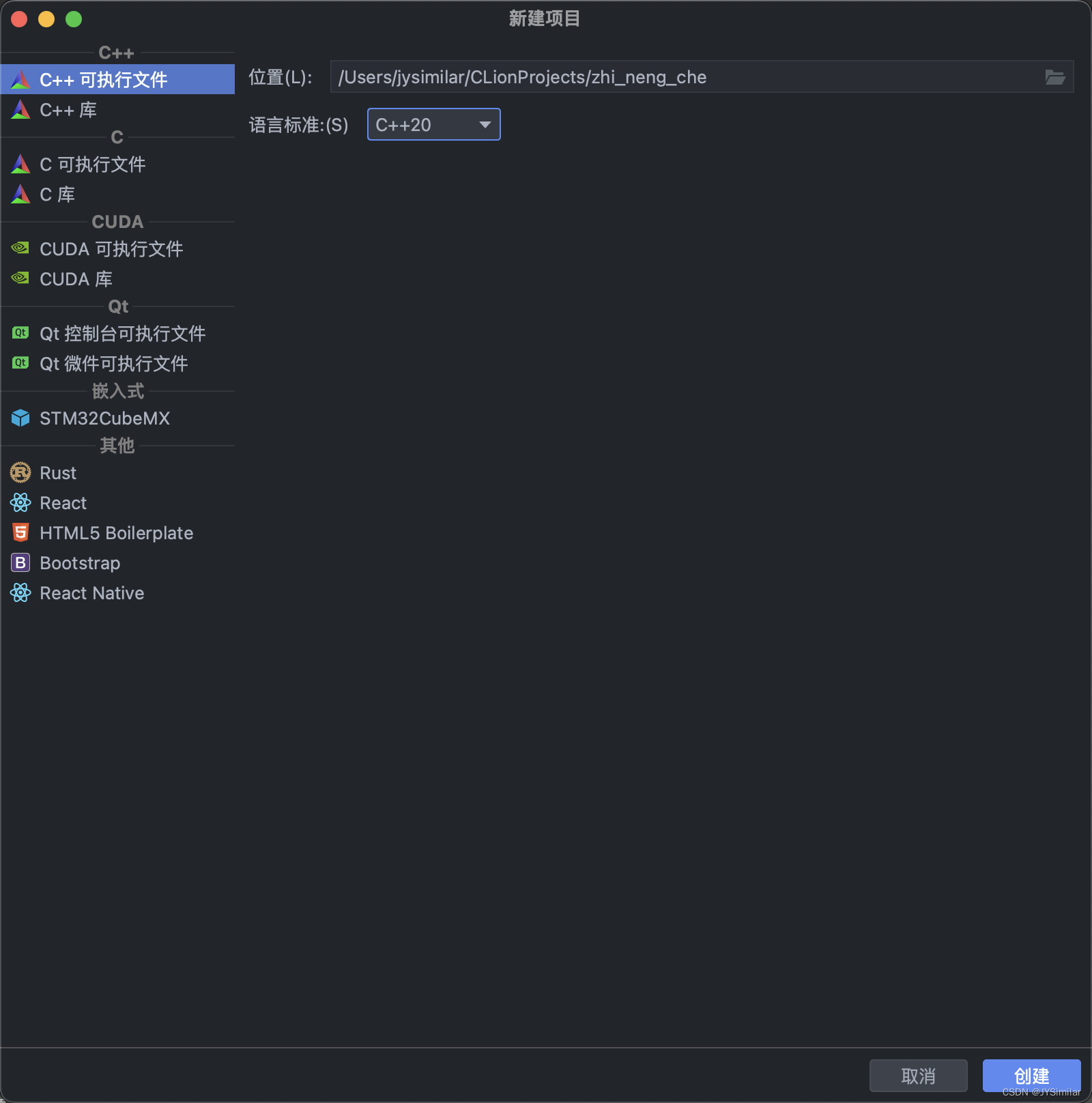
选择好自己想要的路行,c++标准建议选择c++14、c++17或者c++20,接下来点击创建。
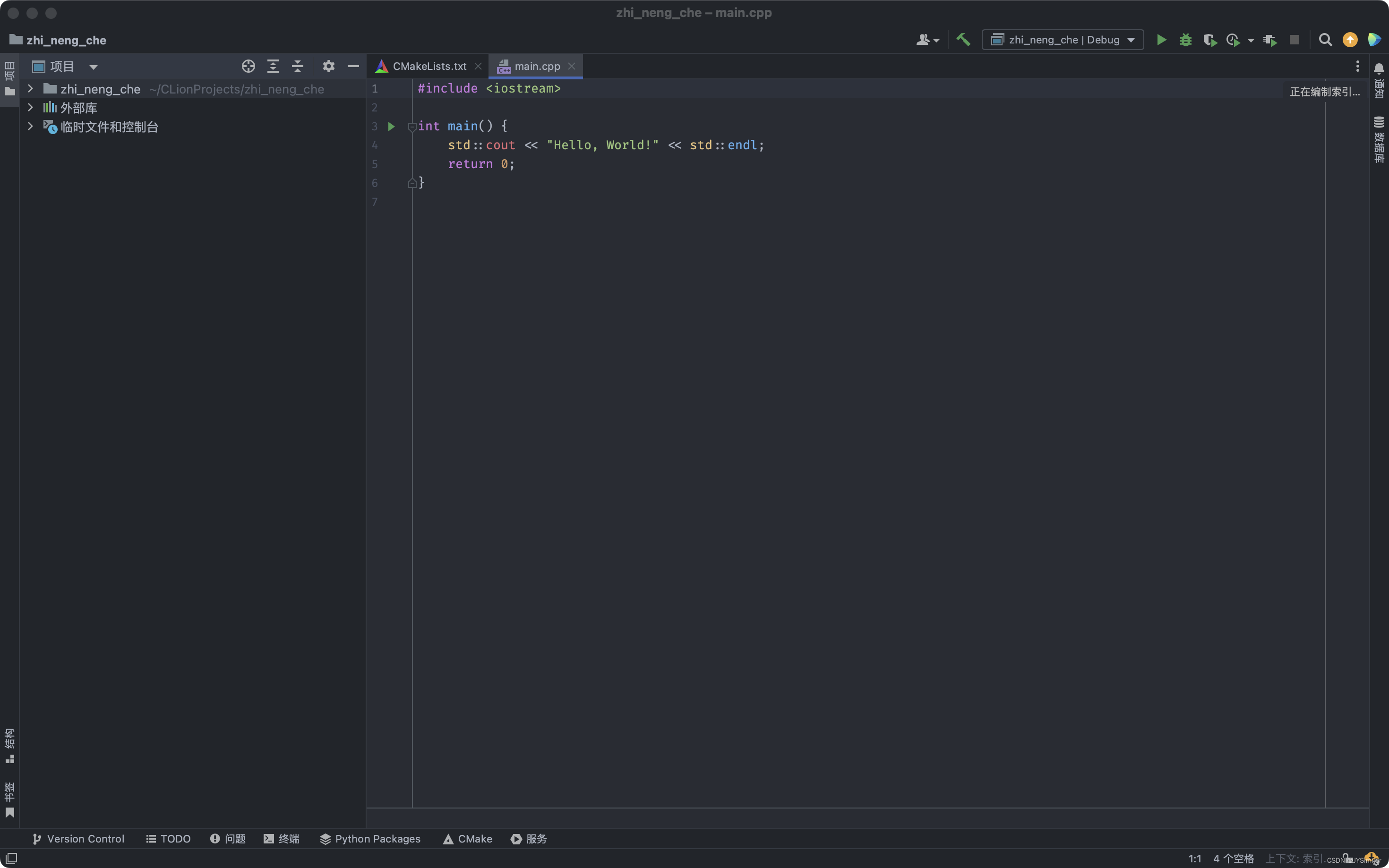
这是创建后自动生成的主函数文件,我们来看一下文件树。
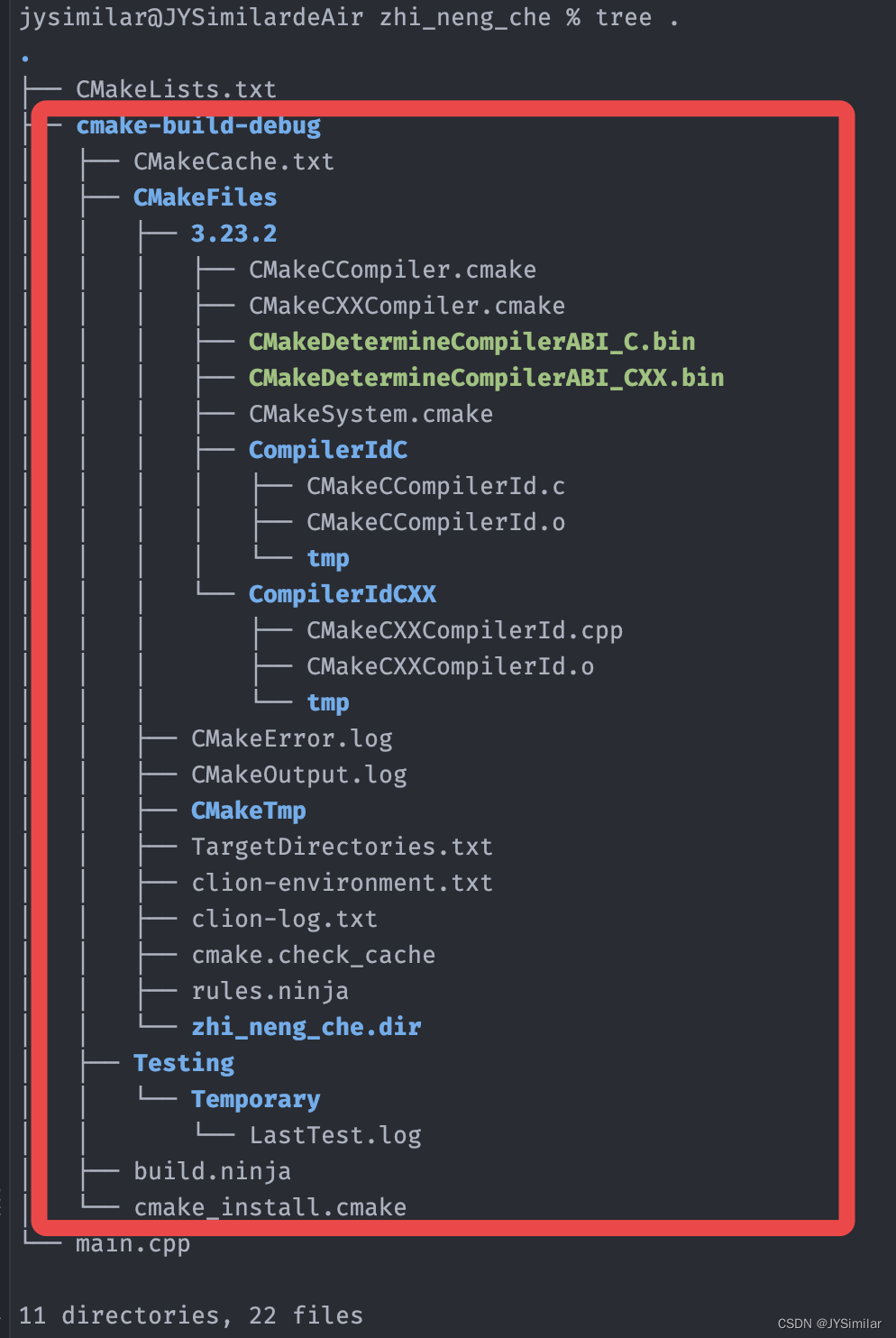
红色框出的部分是cmake编译生成的东西,不用管,我们来看另外两个文件。

这个是main.cpp,生成了一个hello world测试程序,我们可以点一下右上角的运行按钮测试一下能否使用:
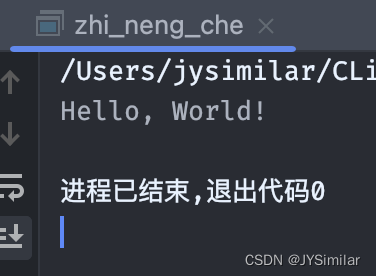
这里可以看到程序运行正常,证明Clion成功找到CMake程序,CMake成功找到了c++编译器并进行编译,同时运行。
这两个按钮用的比较多,第一个是上面用到的那个功能,后面这个是调试按钮,也就是debug。
我们来看看剩下的CMakeLists.txt这个文件:
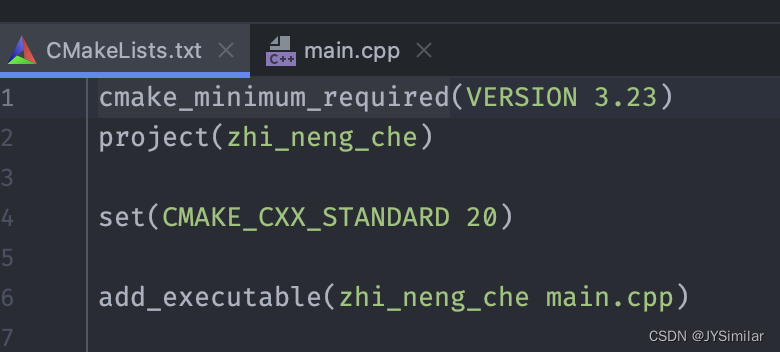
这就是用来编译c++项目的cmake的配置文件,具体使用方法百度找个文档就可以很快入门了。
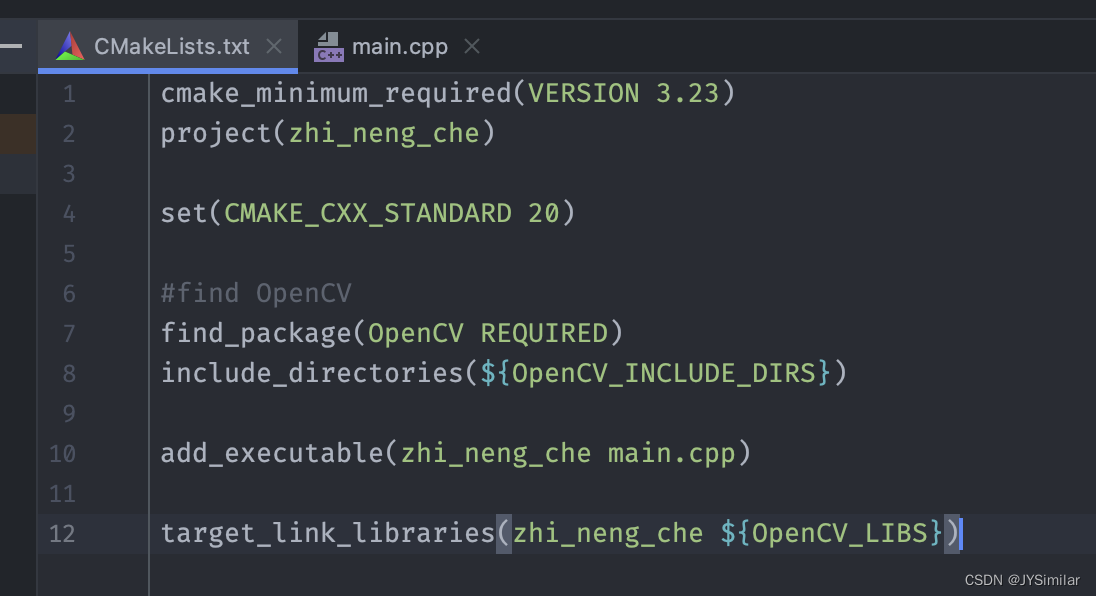
接下来就该将OpenCV引入项目,直接在这个文件中加入下面语句:
#find OpenCV
find_package(OpenCV REQUIRED)
include_directories(${
OpenCV_INCLUDE_DIRS})
和:
target_link_libraries(zhiNengChe ${
OpenCV_LIBS})
然后将main.cpp改成下面这段代码,运行测试能否编译成功,如果不可以,请检查自己的opencv是否安装正确。(请将图片路径,红色圈出部分,修改为自己的图片路径,随便找一张图片测试就行)
#inclu 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1009
1009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









