






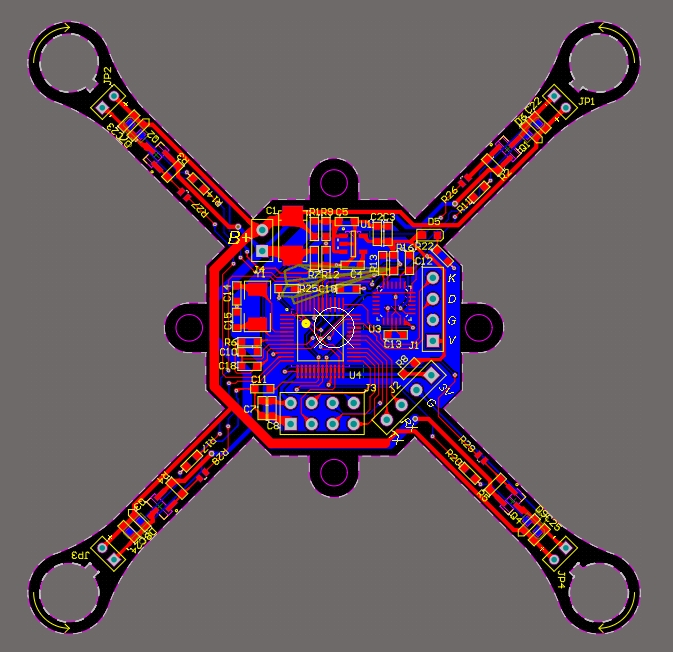
四轴飞行器的硬件部分STM32+MPU6050架构,采用双环PID算法;
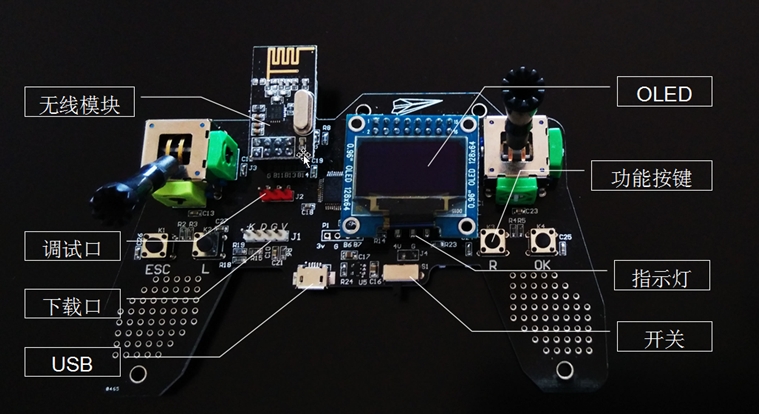
遥控器部分使用OLED屏显示,设计了一套图形化GUI交互系统,人机界面非常友好,可直接借鉴在其他项目上;
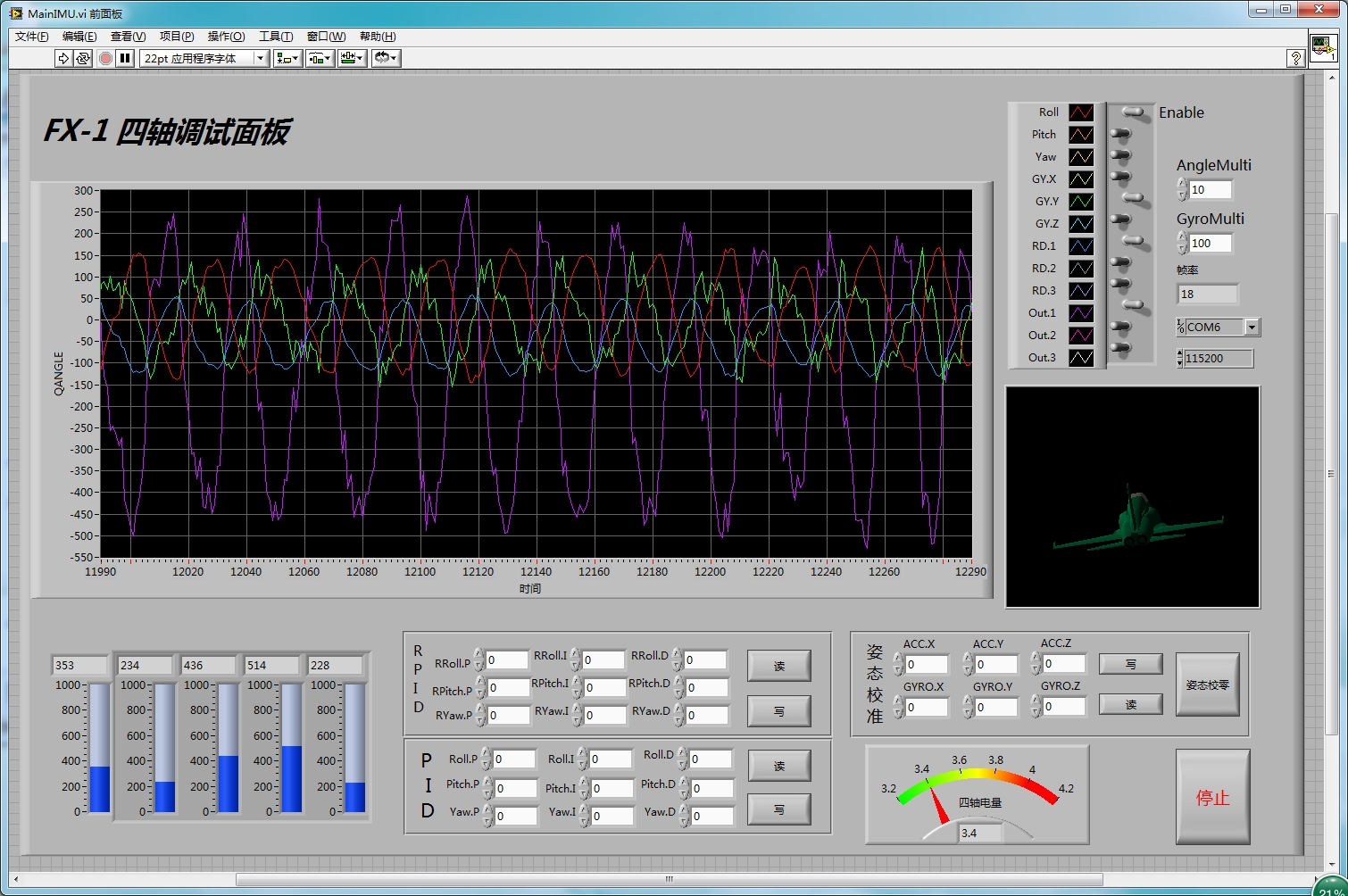
上位机调试软件是用labview写的,带3D姿态显示;
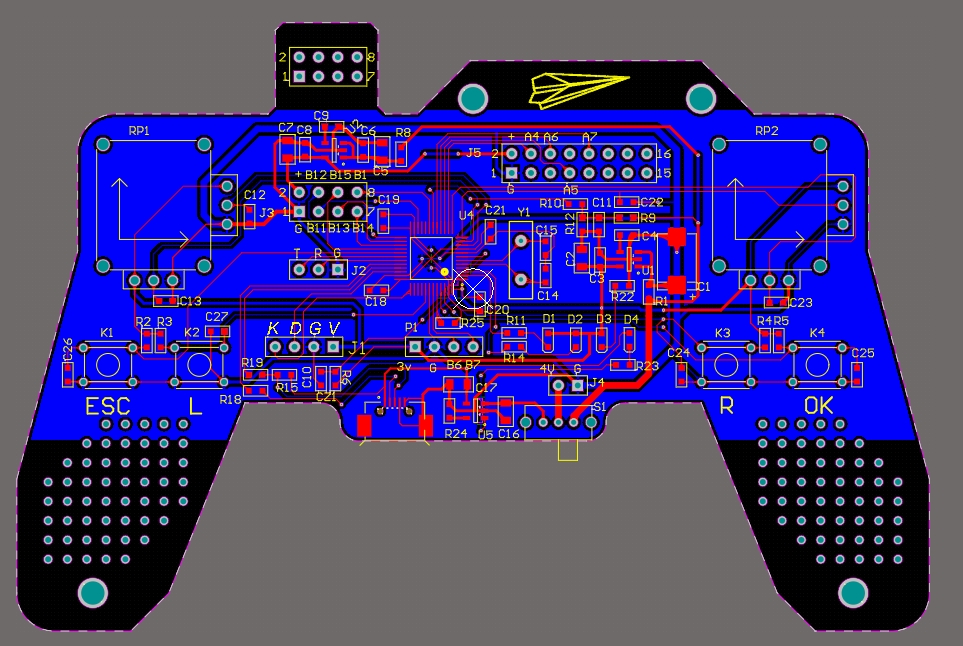
硬件PCB可直接打样,烧写程序即可正常使用。
ID:57100668506144734
风雨同舟_au
四轴飞行器是一种飞行控制系统,由硬件部分和软件部分组成。其中,硬件部分采用STM32和MPU6050构建,软件部分采用双环PID算法进行控制。
STM32是一款基于ARM Cortex-M内核的32位微控制器,拥有高性能和强大的处理能力。MPU6050是一款常用的六轴传感器,能够测量加速度和角速度。
在四轴飞行器的硬件部分中,STM32和MPU6050起到了关键的作用。STM32负责处理器和外设的控制和通信,MPU6050则负责感知飞行器的姿态和运动状态。
双环PID算法是一种常用的飞行控制算法,通过不断调节飞行器的姿态和动力输出,使其能够稳定地悬停在空中。通过该算法,飞行器能够准确地感知自身的姿态,并根据姿态偏差进行反馈控制,实现精准的操控和运动。
除了硬件部分,四轴飞行器还涉及遥控器部分和上位机调试软件。
遥控器部分使用OLED屏幕显示飞行器的状态和控制信息。通过设计一套图形化的GUI交互系统,使人机界面更加友好和直观。这样可以方便研究人员和开发者直接借鉴这套交互系统,应用到其他项目中。
上位机调试软件采用labview编写,具备3D姿态显示功能。通过该软件,用户可以实时监控飞行器的姿态和运动状态,进行调试和优化。这样可以提高飞行器的稳定性和性能,使其适应不同环境和任务。
硬件PCB设计可直接打样,烧写程序即可正常使用。这意味着开发者不需要自己设计PCB电路板,可以直接使用提供的设计方案进行制作。同时,烧写程序可以快速地将飞行控制软件加载到飞行器中,使其能够正常工作。
总结来说,四轴飞行器的硬件部分采用STM32和MPU6050构建,通过双环PID算法实现精准的飞行控制。遥控器部分使用图形化GUI交互系统,上位机调试软件具备3D姿态显示功能。硬件PCB可直接打样,烧写程序即可正常使用。这些技术方案和设计特点为四轴飞行器的开发和应用提供了便利和可靠性。
相关的代码,程序地址如下:http://nodep.cn/668506144734.html
















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









