






小凡:「与其服务一个公司,不如服务一个行业」
一 我的从业经历
大家好,我是小凡,「3D视觉从入门到精通」知识星球的星主。
这里简单介绍下的我的从业经历。
本科主要是做机械出身,研究生入行3D视觉,这里再次要特别感谢张旭老师,带我入门。
研究生期间,主要参与研发的产品-双目立体视觉测量系统(光笔),产品介绍如下方所示。主要使用的技能包括:相机标定、立体视觉匹配、动态跟踪、编码标志点识别、QT编程等。

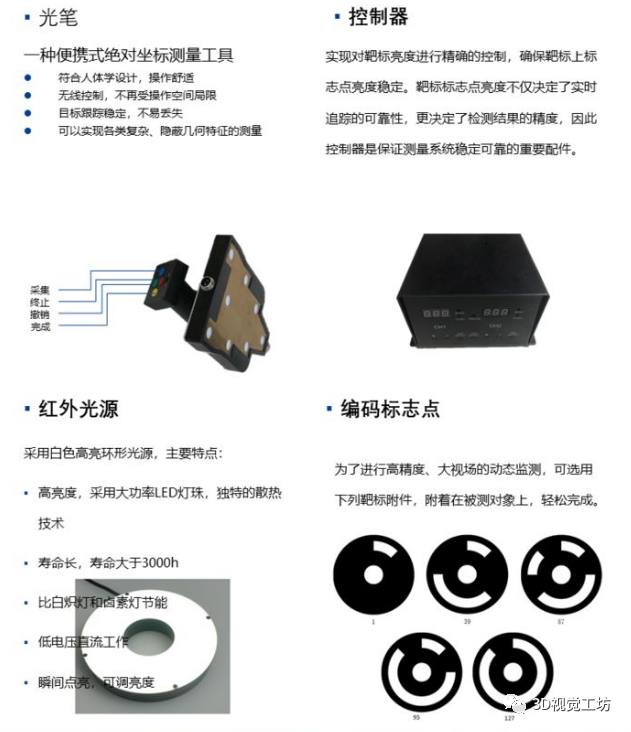
在这个期间,我发现国内3D视觉资料真是少得可怜,更别提系统性的视频课程。那会儿比较庆幸的是,我还有张旭老师、两位厉害的师兄(郑泽龙和程伟师兄)的指导。
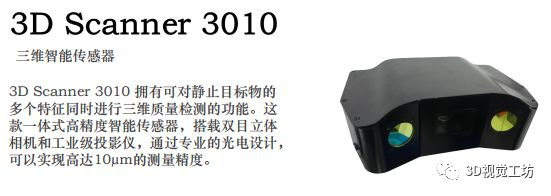
第一份工作,参与研发的产品-3D结构光相机,主要使用的技能:相机标定、手眼标定、三维点云、结构光三维重建、QT编程。
在工作期间,我发现了三个问题:
公司里当只有你一个人在负责某一个细分知识点的研究,比如点云配准、手眼标定,很难在公司里找到可以请教的同事,因为他们也可能不太熟悉。比如在QT界面编程时,经常界面卡死,需要多线程,如何编程实现呢? 这个时候,就会非常希望有人能稍微给你指点下。
当需要你长时间维护某个模块的算法,但是其他模块,你想要全面学习了解,以应对随时可能面临的跳槽压力,但你很难找到一个平台,告诉你如何高效学习其他的模块。
领导让你去预研某个方向,之前没有接触过。你会特别渴望能有人给你整理打包好的学习路线和资料,这样可以快速出成果。
第二份工作,主要参与了割草机的研发,主要是SLAM技术。

一直以来,我所从事的研究领域,始终在3D视觉领域,包括工业3D视觉、SLAM等。
我误打误撞从工业3D视觉领域进入了SLAM产品研发,经历了四年的莫怕滚打,这期间的感受可以用几个成语来概括:1、后悔不已;2、心平气和;3、乐在其中。
工业3D视觉与SLAM领域所需要的技能,差异还是非常大的,这里简单举例如下:
①传感器的不同,SLAM常见传感器是码盘、IMU、鱼眼、全景、激光雷达、TOF、GPS/RTK、uwb等,而工业3D视觉,更多的是结构光、缺陷检测、针孔和远心镜头、机械臂等;
② 操作系统和编程IDE的不同,工业3D视觉常用的是windows,IDE常用的IDEVisual Studio, 而SLAM常用的是ubuntu,IDE呢较为丰富,QTCreator、Clion、vscode等。
③ 数学能力要求也差异较大,由于SLAM更多的是多传感器融合,对矩阵和各种优化库的理解与使用能力要求较高。但是工业3D视觉重点是对精度要求,因而对某一个细分方法会研究较为透彻,比如相机标定,可能SLAM要求的重投影误差是0.1个像素就够了,但是工业上一般会追求更高精度,比如0.02个像素。那么对于特征点提取的精度,会花大力气去研究。
其他这里就不一一举例了,后面这些会在「3D视觉从入门到精通」知识星球里会大家尽可能地梳理清楚,以便你在择业时,可以有更多参考。
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款;

二 3D视觉算法工程师薪资越来越高了
很多做我们这一行的人可能都有这种感受,目前CV从业人员逐年递增,2D视觉开始内卷严重,很多2D从业者都在想方设法去学习3D视觉技术。因为3D视觉算法从业人员的薪资普遍较高。我们可以从猎聘网上随意找个:

3D视觉入门的门槛一般较高,如果缺少专业的指点,个人想转行,还是要下点功夫的。最主要原因我个人总结可能有如下几个因素:
对3D视觉对从业者的数学能力要求普遍较高,比如对极几何等理论的理解。
对3D视觉从业者的编程能力要求较高,算法工程师一般都需要掌握C++,而C++相比其他编程语言,稍显复杂些。
对3D视觉从业者的工程实践能力要求较高。比如:相机标定。虽然可能张氏标定法很多人面试时,都能说上几句,但是真正落地操作时,如果不懂背后的原理,标定的结果总是会出现误差较大。
三 「3D视觉从入门到精通」知识星球
3.1 什么是「3D视觉从入门到精通」知识星球
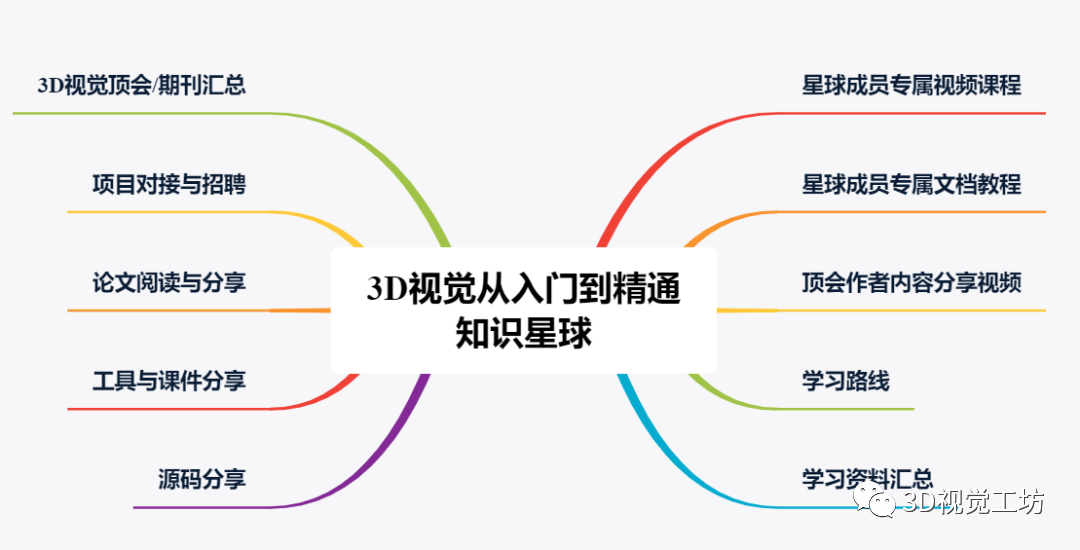
「3D视觉从入门到精通」知识星球是我在五年前建立的,后来有伟哥一起加入,以及很多愿意分享干货的嘉宾们加入,是 国内超一流的3D视觉学习交流社区 ,目前已有近5200名活跃成员,主要涉及工业3D视觉(立体视觉、三维点云、机械臂抓取、结构光、相机标定、缺陷检测、三维测量)、视觉/激光SLAM(定位、建图、导航、AI感知)、自动驾驶领域(传感器标定、规划控制等)、三维重建,CV入门、视觉产品落地经验分享、3D视觉传感器选型(摄像头、3D相机、TOF、RTK、UWB等)、学术交流、求职交流等领域。星球内部沉淀了众多实战问题,相信一定能帮你少走很多弯路,以及各个模块的学习资料:论文、书籍、源码、视频等。
针对小白,星球推出了各个模块的学习路线,能够帮助新人快速入门。
针对需要进阶的童鞋,星球分享了大量的前沿论文和配套代码,同时也不定期邀请了顶会作者在星球内进行分享。
相信这些内容,一定能有效地帮助到个人的快速成长,以适应企业对3D视觉人才的需求。
3.2 星球成员
星球汇集了国内外各个高校的研究生、博士生,包括但不限于清华大学、上海交通大学、华中科技大学、中国科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学、香港科技大学、香港理工大学等,以及国外留学的小伙伴,主要就读于南加州大学、墨尔本大学、慕尼黑工业大学、亚琛工业大学、京都大学、苏黎世联邦理工、密歇根大学等。除此之外,还有很多一线工作的算法工程师、开发人员,包括但不限于百度、旷视、华为、奥比中光、云从、阿丘科技等。
3.3 合作企业
知识星球现已和众多公司建立了良好的合作关系,公司内的算法负责人会不定期的来内部进行前沿技术/产品分享,除此之外,星球也为公司推荐合格的算法/开发人才。现有合作企业包括但不限于:先临三维、梅卡曼德、奥比中光、图漾科技、腾讯、中科慧眼、挚途科技、追势科技、pmd等~
四 星球内容展示
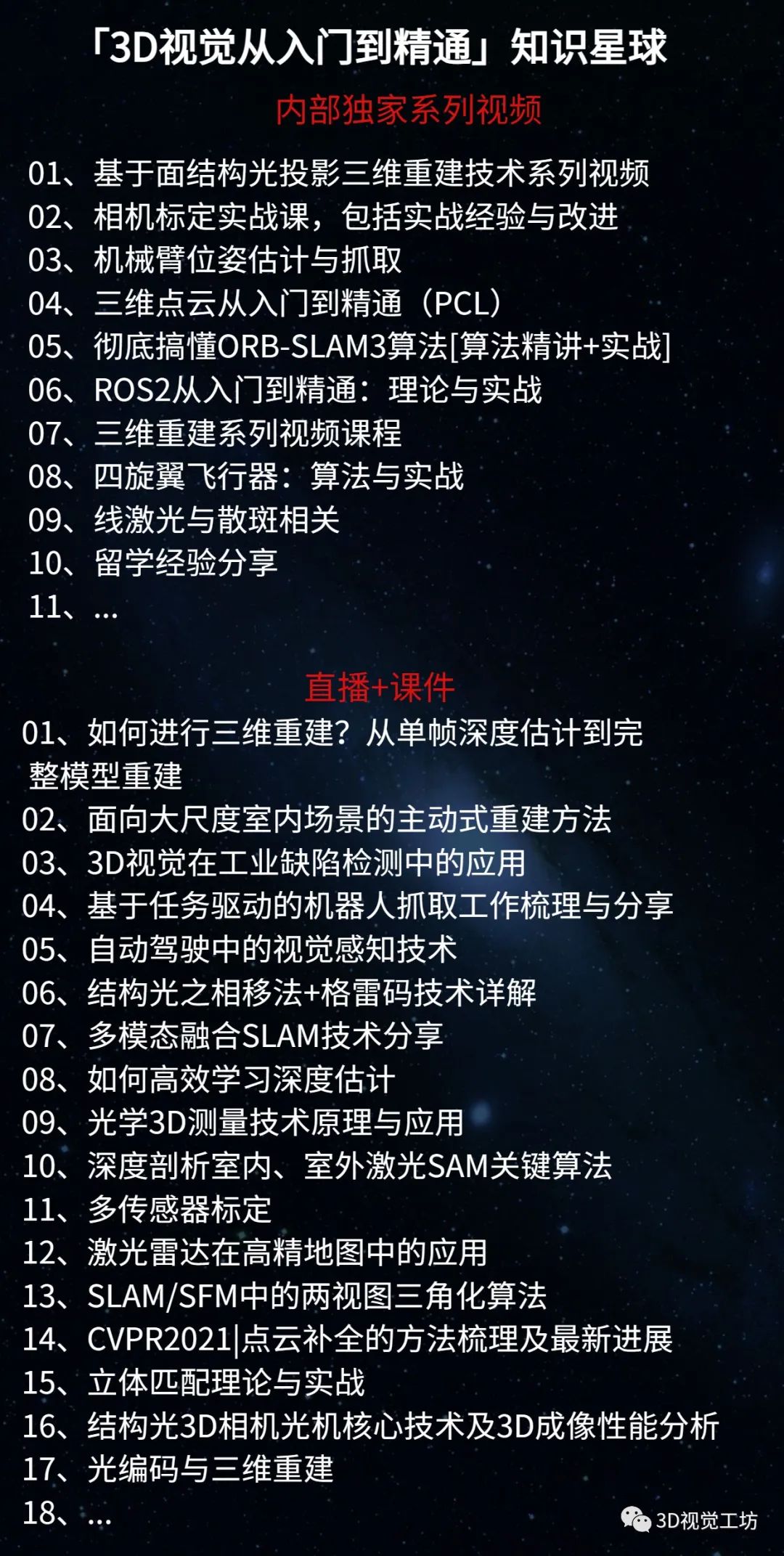
4.1 视频课程
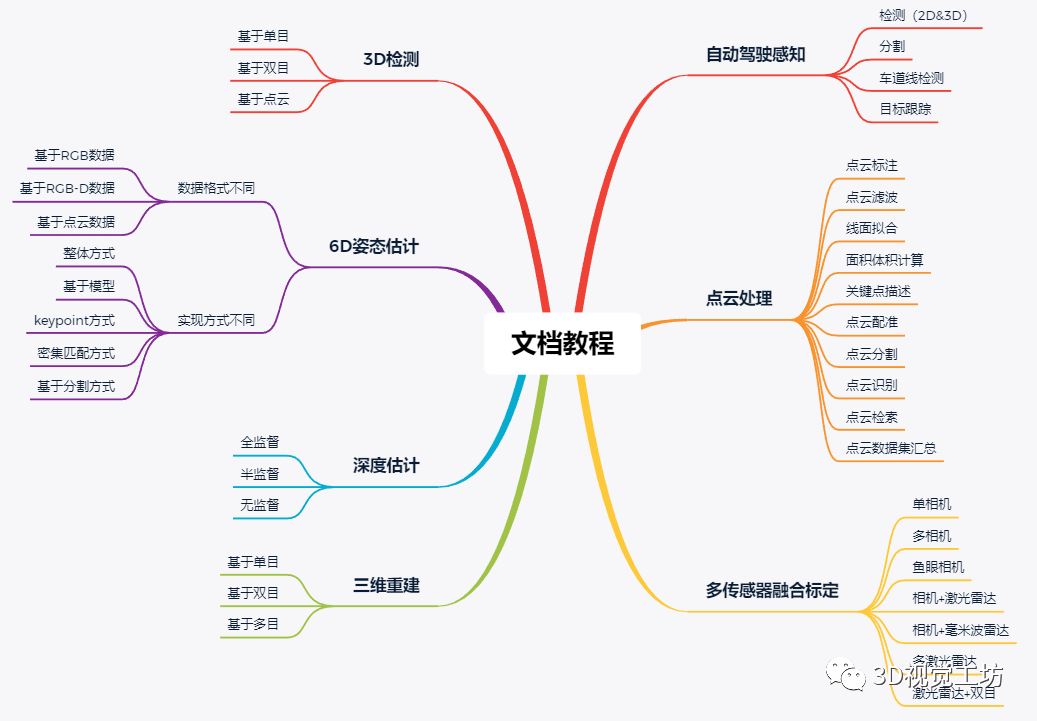
4.2 文档教程
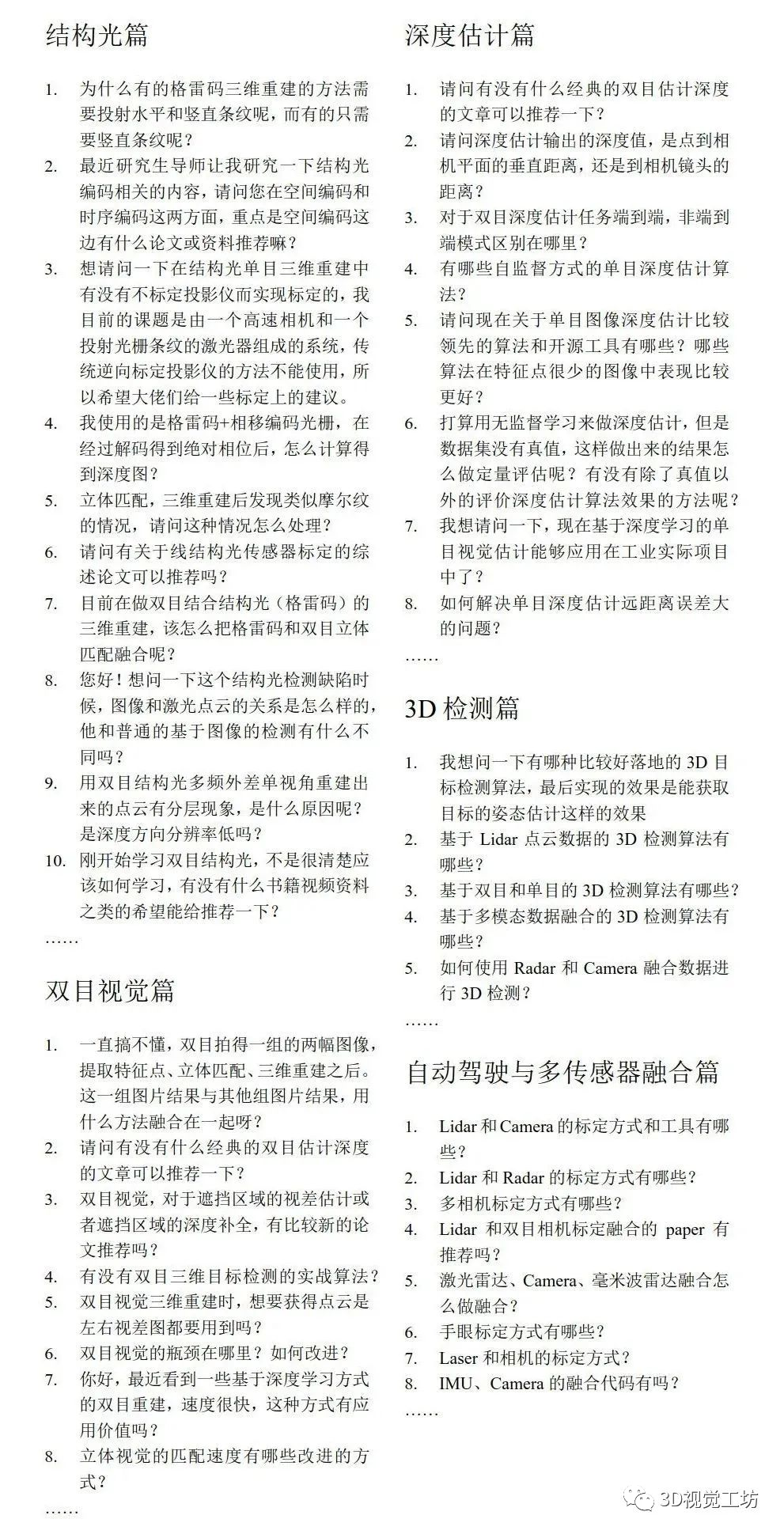
4.3 千个问答

4.4 源码干货汇总
代码|相机标定demo
代码|双目格雷码demo
代码|单目格雷码标定三维重建
高精度绘制椭圆
代码|线结构光+单目系统标定
标定相关源码汇总,涉及立体标定、Lidar-Camera标定、多相机标定、鱼眼相机标定、手眼标定、Laser和camera标定、结构光相关标定、camer和机械臂标定、相机投影仪标定、TOF标定等
缺陷检测源码和资料汇总:涉及PCB、织物、电池、钢铁等缺陷检测文献资料汇总
深度估计与深度补全相关源码汇总
6D姿态估计源码汇总,涉及RGB方式、RGB-D方式、点云方式、基于model方式、基于投票方式、基于深度学习方式
SLAM的一些优秀干货库,代码、论文、文档、research
点云处理相关源码汇总,涉及点云库、点云分割、点云配准、点云识别、点云转换mesh、点云标注、点云voxel转换、CAD模型转换点云、点云体积计算、点云图像转换等
立体视觉相关源码汇总,涉及整套工程实现、立体标定、立体匹配、stereo SLAM等 立体匹配开源代码
3D检测与识别源码汇总,涉及单目3D检测、双目3D检测、基于点云的3D检测以及数据融合方式的3D检测
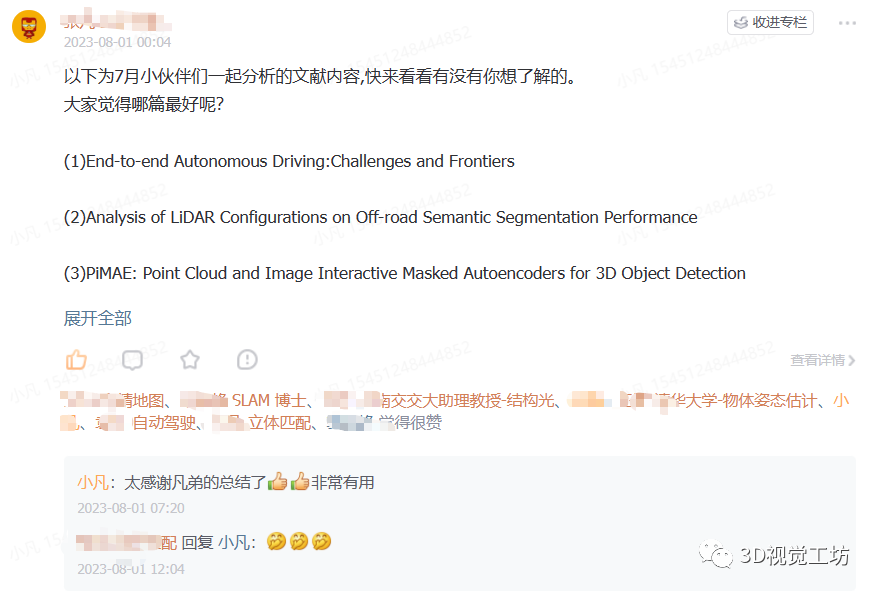
4.5 前沿论文分享


4.6 3D视觉顶会|期刊汇总
SLAM:ICRA、IROS、ROBIO、ICCV、CVPR、RSS、AIM、ICMA等
点云处理:ICRA、CVPR、ICCV、ECCV、ACCV、BMVC、TPAMI、TIP、3DV等
3D视觉/机器视觉:arXiv、ROBIO、ICRA、BMVC、光学学报、中国激光等
计算机视觉:CVPR、ICCV、ECCV、AAAI、ICCP、ICPR、PR、IJCV、CVIU等
图像处理:ICIP、TIP、SIPPR、ICDIP、ICPR等
深度学习:CVPR、ICCV、ECCV、AAAI、IJCAI等
机器学习:NIPS、ICML、ECML、ACML、ECAI等
自动驾驶:IROS、ICRA、IEEE、ITSC、ICVES、RSS、IJRR等
医疗影像:MICCAI、ISBI、SPIE、MIDL等
4.7 项目对接与招聘
限于篇幅,这里仅举例:
6mm双目三维测量系统算法设计
点云编辑外包需求
高精度3dHPE检测
本科毕设辅导|基于多相似度和注意力机制vslam闭环检测
二维图像匹配/配准
工业内窥镜3D测量
人体三维动作重构20-30万
...
招聘需求:
图漾科技招聘 | 技术总监
25~60K|梅卡曼德招聘光学工程师、产品经理等岗位
上海银马科技招聘三维重建、图像处理算法工程师
上海驭矽科技招聘TOF算法工程师
大疆车载招聘SLAM算法、地图与定位算法、感知算法、机器学习算法工程师
20~50K|智驾科技招聘深度学习算法、感知跟踪算法、自动驾驶高精度地图算法、嵌入式软件、SLAM算法、控制功能算法、地图构建算法工程师
...
4.8 如何快速接私活?
3D视觉,如何快速接点「私活」?: https://t.zsxq.com/0cMjBgCeW
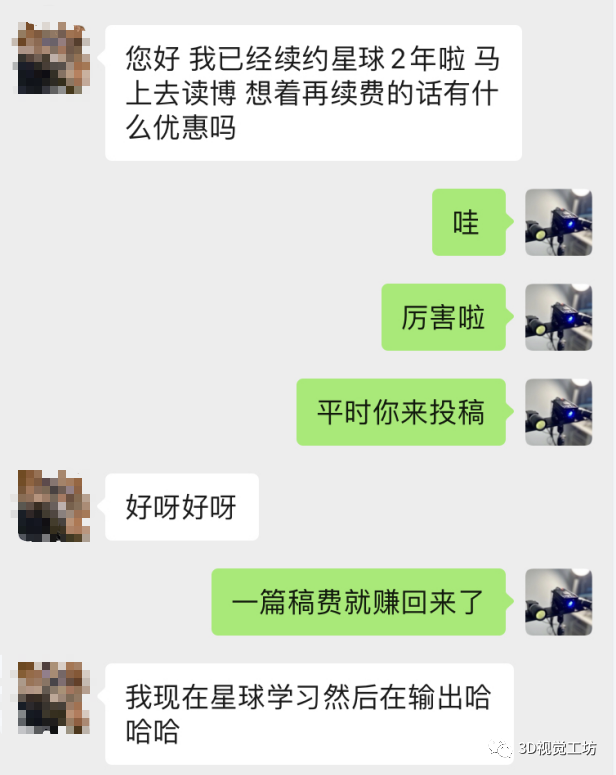
五 粉丝的反馈
六 星球规划
星主现已全职服务星球,接下来的规划主要包括以下几个方面:
联合各位嘉宾老师,对3D视觉每个细分模块,针对不同人群,梳理学习路线图。方向包括但不限于相机标定、机械臂抓取、三维点云实战、三维重建、结构光(面、线、散斑)、Halcon(3D)、缺陷检测(2D/3D)、3D视觉传感器选型、SLAM定位(orb-slam、cartographer等开源算法)、视觉/激光SLAM融合、RTK/UWB/RGB-D/dToF等原理和使用、路径规划等学习过程中的重难点进行深入剖析,梳理更加完善的学习路线图。
星球内增加更多实战培训项目,对于产业界常会遇到的问题,找到经典案例进行视频讲解与代码实操。让每一个星球成员,都能具备企业所要求的3D视觉技能。
邀请顶会作者和不定期进行直播分享,对论文做深入解读。
进行答疑小分队的团队建设,以帮助星球成员快速解决各种疑难杂症。
...
大家好,我是小凡,希望能用尽全力服务中国3D视觉行业,也希望能与你一起,推动中国创新更进一步。
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款;

















 370
370

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









