






点击下方卡片,关注「3D视觉工坊」公众号
选择星标,干货第一时间送达
编辑:3D视觉工坊
扫描下方二维码,加入3D视觉知识星球,星球内凝聚了众多3D视觉实战问题,以及各个模块的学习资料:近20门视频课程(星球成员免费学习)、最新顶会论文、计算机视觉书籍、优质3D视觉算法源码等。想要入门3D视觉、做项目、搞科研,欢迎扫码加入!
回答一
作者|叶小飞
https://www.zhihu.com/question/266477032/answer/2957081423
2023年了,现在越来越多的人把Vision和Robotics结合到一起做,所以我就在这里专门针对Vision for Robotics的角度来把各个机器人顶会按照难度、论文质量排序,并且说一下每个会议审稿人的大致喜好。
PS: 这里排出RSS,因为RSS里面搞视觉的比较少,但不考虑vision的话,RSS综合来看绝对是No. 1。
难度排序
我自己作为一作中过CVPR/ECCV/CoRL/ICRA/IROS/WACV, 所以就根据自己的投稿/审稿经验将这几个机器人会议的难度与视觉会议放在一起对比,这样更偏Vision一些的朋友也有个参照。
CVPR > ECCV~=CoRL >> ICRA ~= WACV > IROS
CVPR的难度略高于ECCV估计大家都没有什么意见,但是这个没进CCF列表,每年也就几百投稿的CoRL居然能和ECCV难度平齐?
没错,CoRL单看接受率确实比ECCV高了八九个百分点,但ECCV里的投稿非常鱼龙混杂,我自己审过的稿子有一半质量差的令人发指,我一度怀疑他们是来骗review的。而CoRL作为小众会议,来投的基本都是专注于这个领域的学者,整体投稿质量其实比较高,所以高上几个百分点并不代表什么。另外从Rebuttal的经历来说,CoRL采用openreview, 审稿人可以无限让你补充材料回答问题,我的rebuttal内容甚至比原文还要长,这一点也加大了CoRL的难度。最后, CoRL其实最主要还是RL的战场,所以对Vision投稿要求很严格,CoRL要求投稿人的文章紧扣Robotics, learning, vision, novelty, and practical 这五个关键词,能把这五个凑齐真的很不容易……
到了ICRA,难度降了不少,个人感官和WACV差不多,就是你把文章做扎实,找好问题,文章好好写,其实大概率会中的,并不需要太多novelty在里面。但和WACV不一样的是,搭积木的论文在ICRA中很不吃香,这点后面会细说。
再看IROS,做 SLAM一类的投IROS其实挺不容易的,但Vision的门槛低很多。说句实话,做Vision往robotics套最后投IROS很大概率都是走投无路了。。。我有一篇文章被三大会加NIPS连拒几次后在IROS找到归宿。。
质量排序
CoRL > ICRA > IROS
CoRL里面的大多数通关的Vision文章质量都不错,比如2022的“Real-World Robot Learning with Masked Visual Pre-training", "CoBEVT: Cooperative Bird's Eye View Semantic Segmentation with Sparse Transformers" (手动狗头),2021的DETR3D等等,大多都值得一读。另外,大名鼎鼎的CARLA仿真软件也是在CoRL首发。
ICRA里的Vision文章有少许比较惊艳,譬如2023 Bolei老师的TrafficGen, Action-aware Driving Caption Transformer, 2022年的最佳论文等等。但它大部分还是趋于中规中矩,剩下的一些不堪入目。
到了IROS感觉Vision的文章非常鱼龙混杂,绝大部分没有什么营养价值。不过有些真的做到了上车/上实体实验的,还是值得一看。
审稿人喜好
CoRL
real-world, real-world, real-world! 重要的事情说三遍!投CoRL的Vision文章现在一定要有真实数据做验证,只用仿真大概率会被喷死。我参与的几篇里凡是只用仿真的,哪怕框架再新,也被挂了。
另外审稿人非常看重你的novelty与pratical的结合。你的模型learning的方式要novel,同时解决的问题要实际,不能说整了一堆花里胡哨的东西最后只是在于提高一两个百分点,更重要的是能解决什么实际的问题,所以故事一定要讲好。
ICRA
我目前投ICRA的战绩是六投六中,感觉ICRA的审稿人都比较reasonable,但同时又很实际。你可以只用仿真,设计的算法可以是已有的东西拼接起来的,但是你解决的问题一定要具有独特的意义,并且你的算法是为你的问题服务的。审过不少把ICRA完全当视觉会议投的,模型搭了一堆积木,却说不出为什么这样搭,最后又没讲清楚能解决啥实际问题,这种大概率挂。所以ICRA里你设置问题的setting非常重要。
IROS
一直没有抓到IROS审稿人的偏好,有我觉得很烂的被收了的,也有写的不错悲剧后来又中了ICRA的, 可能还是我投的审的过少。。。
最后说一下,以上只是根据我个人审稿+投稿经历,结合身边朋友的经验来讲自己的亲身体验,若有不对之处,欢迎素质讨论!
回答二
作者|贾子枫
https://www.zhihu.com/question/266477032/answer/310947773
回答这个问题,是因为我在开始机器人领域的研究后,一直非常希望有人给我讲一讲机器人领域的会议和期刊,给我写作的指导,了解如何找到好文章和投文章,甚至包括Latex的用法,相关研究方向的Bibtex等等,回答中会涉及到部分期刊。虽然自己的publication算不上亮眼,但我总找借口说我攻读硕士学位,并没有发文章的硬性指标,这样的成绩还算不错啦!我回答问题有几个毛病,比较啰嗦,经常不能给出确定的答案,大概也比较枯燥,准备阅读的大家需要做好心理准备。为了给小白的同学们更大的帮助,按照成长路线来写。。
----------
感觉答案写太长了很多同学可能读不明白,其实主要是想说明好不好和大不大,难不难的关系。
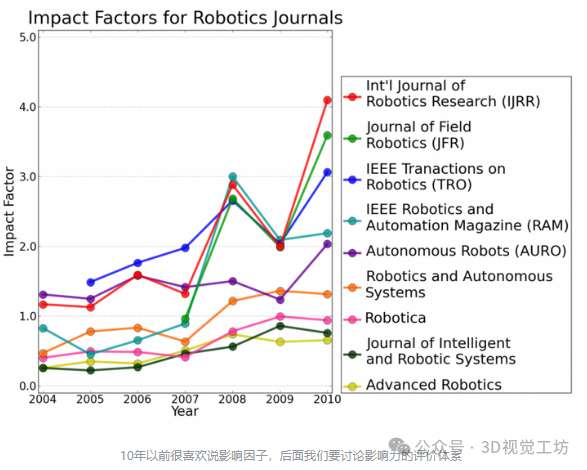
会议的评价体系应该是有很多。可以看会议的影响力,比如早期我们就只有用类似于期刊的Impact Factor影响因子来评价,影响因子越高的会议,也会吸引更多更好的文章,中稿的几率也小。后来Google scholar则用H5 Index来评价会议的影响力。影响力的问题就是能反映出会议前几年文章的水平,不太能代表当下及以后。也可以看会议的采纳标准是不是很高,这个最简单的就是看Acceptance Rate,接收率越低就说明文章越难中,比如CVPR,ICCV的Oral接受率常低于5%,很多人也喜欢在自己的Publication List里面标注出这个数据。但是有些会议规模小,投稿的文章都是很好的文章,那么Acceptance Rate的参考意义就不大了,需要有行业内的专家“口碑”,这个口碑和会议的影响力以及Acceptance Rate关系不大,就是行内的认可度。所以如果一个会议规模很大,接受率低,影响力也很大,口碑超级好,那毋庸置疑是非常好的会议,比如NIPS,2017的Acceptance Rate是21%,投稿3240篇,中679篇。H5-Index在谷歌学术中的人工智能分类排名第一(忽略arXiv),这个霸主地位简直无法撼动。
----------
当年我对发文章的了解只有SCI和EI,期刊的话需要看影响因子(IF,Impact Factor),其他一律不懂。于是就会搜索“机器人最好的会议”。幸好那时候不会有世界机器人大会(WRC)这种误导。我收藏在自己收藏夹里的是两个科学网的网址。让我记住的就是机器人领域最厉害的会议就是ICRA和IROS!还有机器人领域的顶级期刊IJRR,JFR和TRO!(问题里给的Quora链接写的TOR,感觉就比较业余了。。。因为官网给的缩写就是T-RO,大概是因为引文的格式,Transactions on Robotics可以写成Transactions,Robotics On)
于是就开始心心念念的想给ICRA和IROS投文章,被屡次据掉不提。。
我自己记了一个My Publication Chronicles,最曲折一篇会议从10年写,到13年才发表。当时以为Robio是一个很好的会议,中了还很高兴,应该是被小木虫的帖子闲话机器人领域的国际会议 - 论文投稿 - 小木虫 - 学术 科研 互动社区误导了。。后来没钱开会就取消了。当时的CLAWAR和Humanoids明显好很多,不过方向比较窄,攀爬,足式,人形,都是注重locomotion的会议。

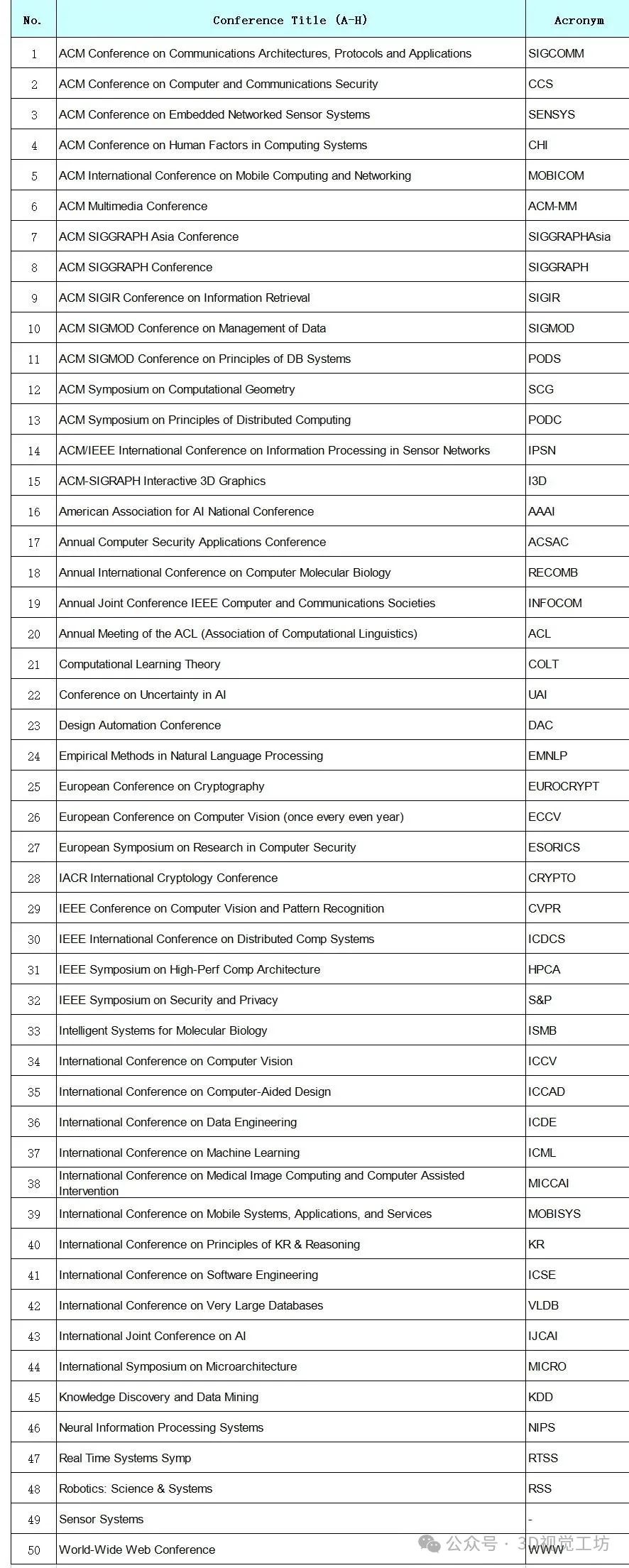
自以为连投了机器人三大顶会-_-!首次听说RSS是因为11年换工作到了新加坡科技局信息所工作,12年初就看到了这份所里给出的无条件资助开会的Tier 1会议列表。What?竟然没有ICRA和IROS?机器人相关的只有RSS?这份名单今天看也不算很过时,就附给大家参考。这里的会议大都不是靠会议的影响力来排名,而基本是专业领域的教授,评委会根据口碑选出来的。I2R的表单就是参考NUS的School Of Computing的表单。当然后来执行的时候ICRA和IROS其实也是无条件资助开会的,不然整个Robotics Program几十号人都没办法去开会了
后来随着我在13到15年迎来自己paper的高产期,对各个会议的认知又发生了一些变化。
没有最好,只有更好。
10年9月份把上面那篇文章投给ICRA的时候,正好和在微软亚研实习的中学同学一起住。他聊起发表的CVPR,我也说我投了机器人顶会ICRA。“ICRA啊?我知道啊,很好发呢!”“嗯。。。”
那段时间和他聊了很多,知道了ICCV,ECCV等计算机视觉的会议,也了解到那个时候做视觉的发不了视觉顶会的话,就会拿机器人顶会灌水。。。也知道了ICRA和IROS在计算机科学大领域的会议中排名只能算B类。我觉得做视觉的发表机器人会议文章,就是对我们的降维打击。
后来开始系统的看一些机器人领域大牛(Google Scholar从某个科学家的标签上点击robotics就可以看到有机器人学标签的各位大佬按照引用量的排名了)的文章,发现排名高的大牛们还会发很多AAAI,UAI,IJCAI,NIPS,AAMAS,ICML,...... 机器人毕竟还是和人工智能分不开。期刊也会发IEEE内大名鼎鼎的PAMI,这时候就觉得做机器人不能眼光只局限在小小的robotics,应该有更广阔的天地!
这个认知在我做神经认知机器人时又被刷新了。当时组里的机器人方向大家目标是RSS, ICRA, IROS, TRO,做神经计算的目标是NIPS,IJCNN,ICONIP,TNNLS,TAMD,TEC,Neural Computation,Neurocomputing之类,然后两个方向进行结合,组里的共同目标就是PLoS One(好像在生化方向已经是很水的期刊了),PLoS Computational Biology,以及PNAS。那个时候才知道了有一个期刊叫做PNAS,做工程的如果能发表到PNAS,大概将来能有机会评院士呢吧?跳出了纯工程领域的思维,发文章的等级又会有一次提升!
然后有一次听了意大利的BioRobotics大佬Paolo Dario的讲座,讲了两个小时他对Science和Nature的渴望。。。如果机器人和生物方向结合,看来发表NCS也不是不可能啊?
所以提一下比较敬仰的两个人发表的Science文章。
Gerald Edelman,从大脑转型做机器人相关工作后的Science文章。Learning in and from Brain-Based Devices(https://www.science.org/doi/10.1126/science.1148677)
Geoffrey Hinton,组里做视觉的老大哥给我说深度学习启蒙于这一篇文章。
Reducing the Dimensionality of Data with Neural Networks(https://www.science.org/doi/10.1126/science.1127647)
在这里,机器人人工智能完全上升到了科学的高度。不是调调参数摆弄摆弄模型刷一刷数据集能搞定的了。
跨领域的创新性工作是比较容易发在好的期刊和会议的上的。但是创新性的工作也很有可能做不出成果,需要权衡。
正题:ICRA,IROS,RSS和ISRR
可以说按照顶会顶刊鄙视链 科学领域 > 工程领域 = 计算机领域 > 机器人领域,在机器人领域中的这几个会议或期刊的差别并不大,不用太纠结。每个会议都有每个会议的基因和圈子,挑选合适的会议投就可以了。可谓没有好不好,只有合不合适。这个正题部分其实很多答案都写了许多,我主要补充一些资料供大家参考。
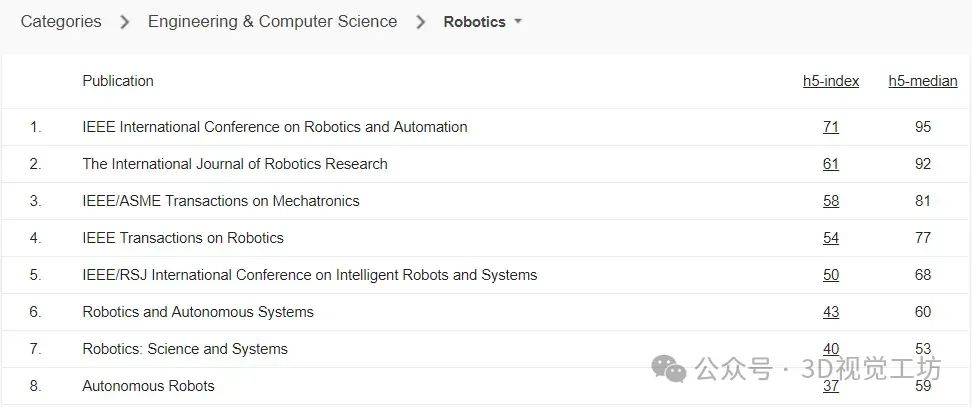
Google scholar的这个Metric排名可以算作是机器人会议和期刊的影响力。
ICRA一直盘踞这个榜单第一名,毫无疑问是机器人领域影响力最大的会议,历史悠久,而且从名字中的Automation就知道是从Control这一个分支进化来的机器人会议。涵盖范围非常大,也造成鱼龙混杂。如果做机械结构的创新,执行机构设计等等偏机械的文章投ICRA也是没问题的。
IROS是IEEE和RSJ共同主办,和ICRA就像是孪生兄弟,提交文章截止和开会日期都差个半年。所以每年大家都有两次提交自己工作的机会,不用着急~ IROS就没有了Automation,多了Intelligent,感觉收录文章的风格也会偏向智能和算法一些。
ICRA和IROS大概就像是视觉领域的ICCV和CVPR。RSS就有点像NIPS了。NIPS早年也是一个比较小众的会议,圈子也很小,这两年壮大的很厉害。相比之下RSS的规模还是不大。深度学习在机器人领域中的应用早期就很多发表在RSS上。感觉会议明显偏重算法。当然按照机器人顶会的要求,除了理论还要有机器人平台上的实际结果,感觉文章内的工作量都非常大。除了这三个会议之外,还有一个曾经也是很精致的机器人领域的顶级小会ISRR。在某些排名中也被列为A类。(CSDN链接中的缩写拼错成了ISSR) 。有些大佬应该是常年参会。不知道这几年光景怎么样了。
计算机会议排名等级 - CSDN博客blog.csdn.net/cserchen/article/details/40508181
都说三十年河东三十年河西,会议也是这样,可能随着一批主要科学家的淡出而淡出,也可能因为新的方向崛起而火爆。大家很多人都提到了Acceptance Rate,ICRA和IROS的常年在40%-50%之间,可谓相当之高。但是除去大佬灌水,评审各种相互提携,留给小白的机会并没有看起来那么美妙。
下面也是我收藏的夹中的一个列表,只是数据也比较过时了。。。
Conference Acceptance Rate Statistics(www.adaptivebox.net/CILib/CICON_stat.html)
最后是题主关心的RSS的统计,毕竟名字中带着Science,承担着机器人科学的使命。某年Vijay Kumar的团队就中了5篇么6篇。看17年的数据不知道是不是成了小众的聚会,希望不要慢慢变成ISRR的样子。
至于说IROS much worse than RSS...
看看过去5年两个会议被引用最高的5篇文章。RSS的,你读过几篇?
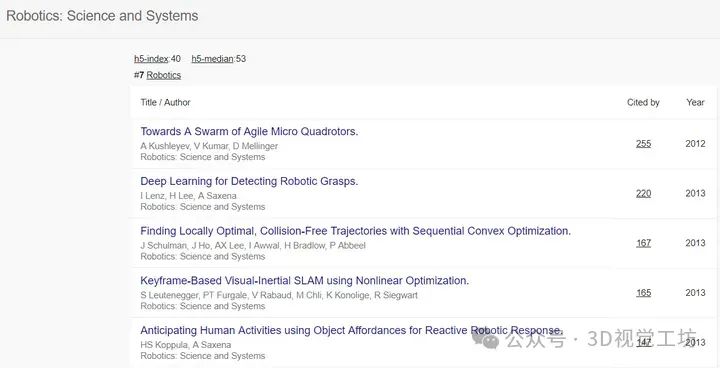 北美大牛扎堆
北美大牛扎堆
再带领你看一下IROS的前5。可以问问 @半闲居士 怎么看待much worse这个评价。。。
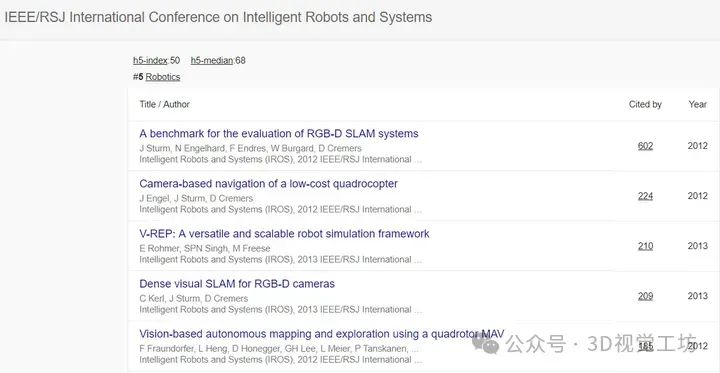 我想不用说什么了吧?
我想不用说什么了吧?
毕竟这三个会议我只发过IROS,写这么长为自己洗白,真累。。。
3D视觉工坊交流群
目前我们已经建立了3D视觉方向多个社群,包括2D计算机视觉、大模型、工业3D视觉、SLAM、自动驾驶、三维重建、无人机等方向,细分群包括:
2D计算机视觉:图像分类/分割、目标/检测、医学影像、GAN、OCR、2D缺陷检测、遥感测绘、超分辨率、人脸检测、行为识别、模型量化剪枝、迁移学习、人体姿态估计等
大模型:NLP、CV、ASR、生成对抗大模型、强化学习大模型、对话大模型等
工业3D视觉:相机标定、立体匹配、三维点云、结构光、机械臂抓取、缺陷检测、6D位姿估计、相位偏折术、Halcon、摄影测量、阵列相机、光度立体视觉等。
SLAM:视觉SLAM、激光SLAM、语义SLAM、滤波算法、多传感器融合、多传感器标定、动态SLAM、MOT SLAM、NeRF SLAM、机器人导航等。
自动驾驶:深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器、多传感器标定、多传感器融合、自动驾驶综合群等、3D目标检测、路径规划、轨迹预测、3D点云分割、模型部署、车道线检测、Occupancy、目标跟踪等。
三维重建:3DGS、NeRF、多视图几何、OpenMVS、MVSNet、colmap、纹理贴图等
无人机:四旋翼建模、无人机飞控等
除了这些,还有求职、硬件选型、视觉产品落地、最新论文、3D视觉最新产品、3D视觉行业新闻等交流群
添加小助理: dddvision,备注:研究方向+学校/公司+昵称(如3D点云+清华+小草莓), 拉你入群。

3D视觉工坊知识星球
3D视觉从入门到精通知识星球、国内成立最早、6000+成员交流学习。包括:星球视频课程近20门(价值超6000)、项目对接、3D视觉学习路线总结、最新顶会论文&代码、3D视觉行业最新模组、3D视觉优质源码汇总、书籍推荐、编程基础&学习工具、实战项目&作业、求职招聘&面经&面试题等等。欢迎加入3D视觉从入门到精通知识星球,一起学习进步。

3DGS、NeRF、结构光、相位偏折术、机械臂抓取、点云实战、Open3D、缺陷检测、BEV感知、Occupancy、Transformer、模型部署、3D目标检测、深度估计、多传感器标定、规划与控制、无人机仿真、三维视觉C++、三维视觉python、dToF、相机标定、ROS2、机器人控制规划、LeGo-LAOM、多模态融合SLAM、LOAM-SLAM、室内室外SLAM、VINS-Fusion、ORB-SLAM3、MVSNet三维重建、colmap、线面结构光、硬件结构光扫描仪,无人机等。

3D视觉相关硬件
| 图片 | 说明 | 名称 |
|---|---|---|
 | 硬件+源码+视频教程 | 精迅V1(科研级))单目/双目3D结构光扫描仪 |
 | 硬件+源码+视频教程 | 深迅V13D线结构光三维扫描仪 |
 | 硬件+源码+视频教程 | 御风250无人机(基于PX4) |
 | 配套标定源码 | 高精度标定板(玻璃or大理石) |
| 添加小助理:cv3d007或者QYong2014 咨询更多 | ||
— 完 —
点这里👇关注我,记得标星哦~
一键三连「分享」、「点赞」和「在看」
3D视觉科技前沿进展日日相见 ~


















 2621
2621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









