







三相无刷驱动器电路设计
前言
若使用无感的驱动方式则做常用的方法是利用反电动势的过零点来推算转子的位置,进而确定什么时候进行换向,所以最重要的是检测过零点,利用比较器可以很好的实现。
一、什么是反电动势?
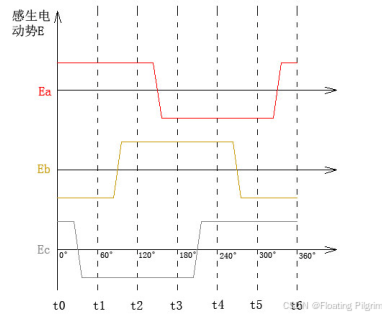
反电动势是在电机运转时,绕组在磁场中旋转产生的电压。当电机未通电的绕组中的反电动势过零时,就是换相的时刻。所以检测这三个相的BEMF过零点,就能知道何时切换电流到下一组绕组。
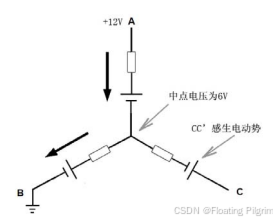
假设转子0°的位置使,AB相通电,
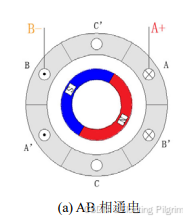
等效电路图为:
转60°后未换向前的状态,
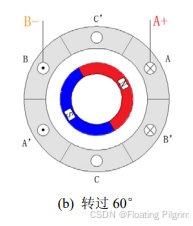
等效电路图为:
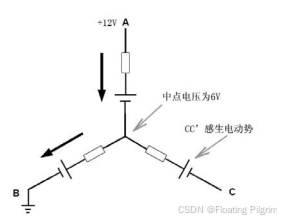
第三相线的反电动势电压反转。
- 其中过零点时的状态
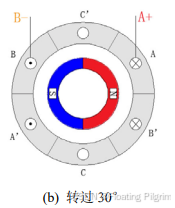
此时感应电动势为30°时的状态:
二、硬件实现
1.需要考虑的点
1、为每个相(A、B、C)设计一个比较器电路,比较该相的电压与虚拟中性点电压。
2、使用电阻分压将高压电机电压降低到比较器可接受的范围。
3、RC滤波以减少高频噪声,时间常数不能太大,否则会有延迟。(滤波效果VS响应速度)
4、使用钳位二极管保护比较器输入。
5、设计虚拟中性点(实际电机的中性点没有引出),通过三个等值电阻连接三相到共同点。
6、确保在PWM关断期间进行检测,可能需要与控制器同步。
7、考虑滞回比较器以避免噪声引起的误触发。
注意:
-
当某一相被下桥臂导通时,其电压可能接近地,这时候比较器的输入需要能够处理这种情况,可能需要电平移位或者确保在检测时该相处于高阻态。
-
可能还需要考虑相位延迟,因为RC滤波会引入延迟,这会影响过零点检测的准确性,尤其是在高速运行时。所以需要权衡滤波和响应速度。
-
软件方面可能需要捕捉比较器的输出变化,并计算换相时间,通常在过零点后延迟30度电角度进行换相。
2.电路
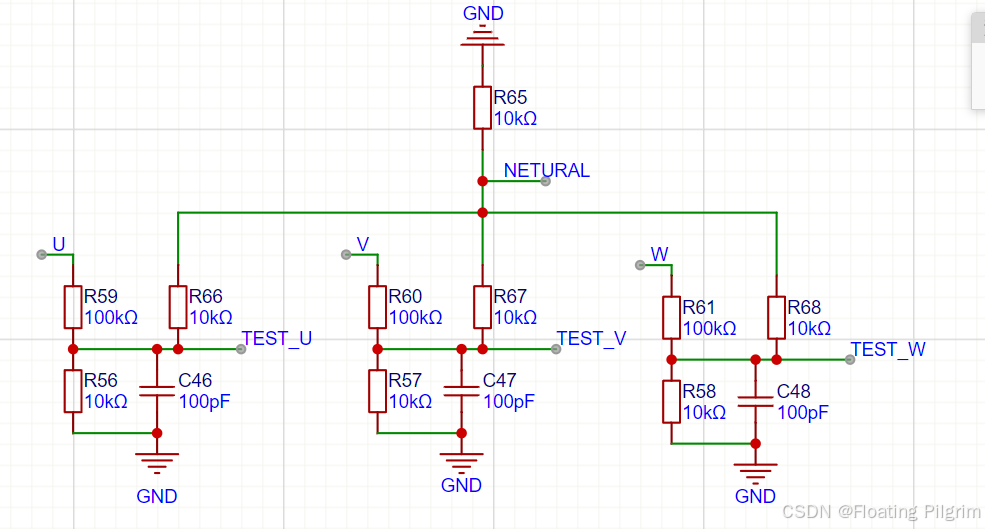
先利用100KR和10KR的串联电阻组成分压网络,将将检测点TEST_X的电压降至比较器的接受范围之内。再利用三个10KR的电阻组成星型网络,其中R65接地的电阻的作用是:
-
强制中性点电位稳定:
通过R65将中性点(NEUTRAL)拉至地电位,抵消三相不平衡或共模干扰导致的电压漂移,确保比较器检测信号的基准一致性。 -
共模噪声抑制:
三相中的共模噪声(如电机PWM产生的尖峰)通过R66/R67/R68汇聚到中性点,经R65泄放到地,避免干扰差模信号。 -
限流保护:
当某相电压突变(如电机换相)时,R65限制中性点对地电流,防止分压后的TEST_X电压超出比较器输入范围。
| 电阻组 | 功能 |
|---|---|
| R59/R60/R61 | 主分压电阻,承担大部分电压降落 |
| R56/R57/R58 | 分压接地,设定TEST_X电压基准 |
| R66/R67/R68 | 构建星型网络,汇聚共模噪声到中性点 |
| R65 | 中性点接地,稳定参考电位 |
比较器电路:
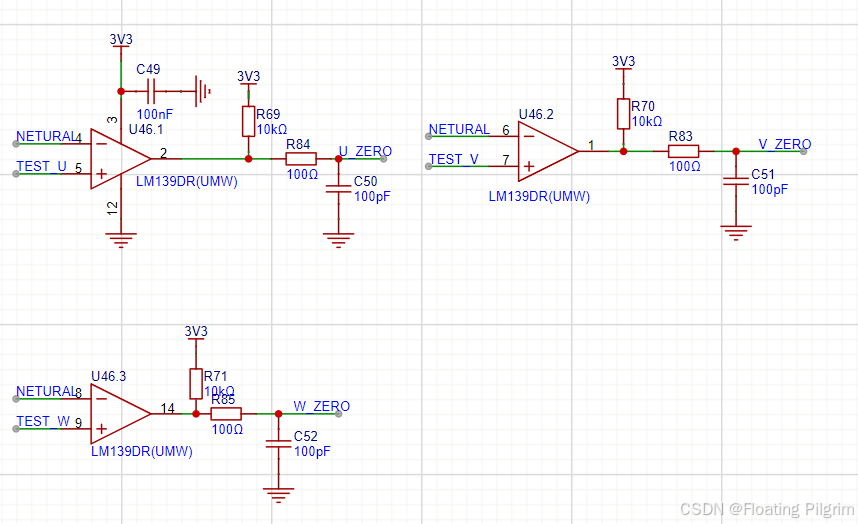
比较器我使用的是四通道的,3V3供电,加输入滤波,开漏输出加上拉电阻,限流电阻,和输出滤波。
说在最后
初版的电路没有经过严格的计算和仿真,后需会根据相关频率和仿真进行修改。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









