






欧姆龙程序,Sysmac Studio伺服程序打包块,直接调用,并实现以下功能:
硬件:NJ101-1000 R88D-KN01H系列伺服
输入信号如下:
1:使能输入和故障复位。
2:点动正转和反转(速度可调)
3:回原点模式,参考图五传感器安装位置,
前极限?原点?后极限。
开始(高速)后退-原点感应或后极限感应-(慢速)前进-离开原点瞬间停止并清零当前位置(原点确认)。
4:绝对运行,必须回原点完成才能执行此模式(速度可调)。
5:上述三种模式有4种速度可设定。
点动速度?原点快速?原点慢速?绝对速度。
6:极限开关信号输入。
信号输出如下:
1:使能状态和故障错误信息。
2:当前速度和当前位置
3:连锁信号输出如下:
1: 点动前进中,不可执行其他模式。
2:点动后退中,不可执行其他模式。
3:原点定位中,不可执行其他模式。
4:绝对定位中,不可执行其他模式。
4:原点完成信号输出。
通过此封装块,直接驱动EherCat伺服
ID:3430655408672845
RAstudio

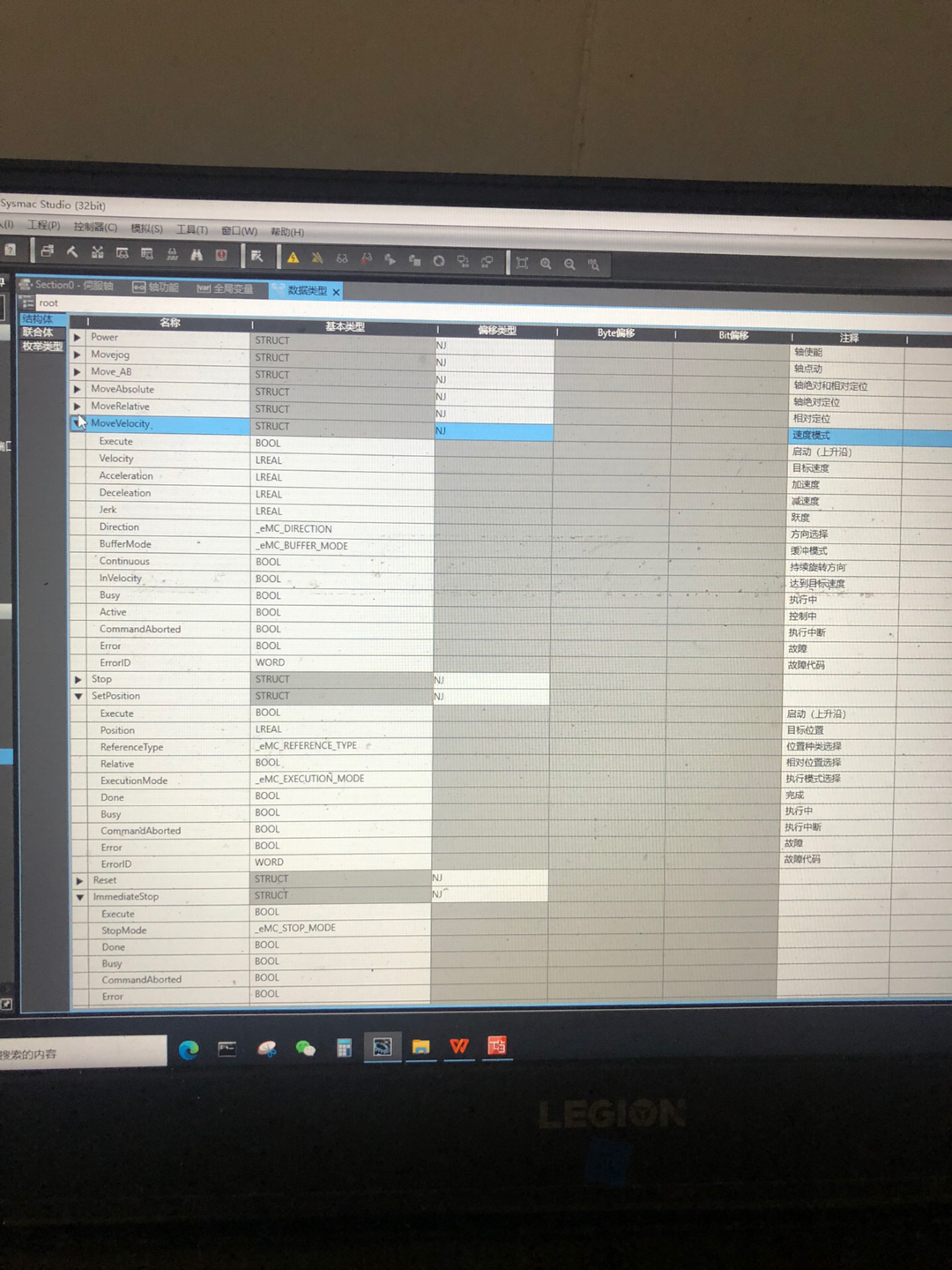
欧姆龙程序的Sysmac Studio伺服程序打包块是一种方便快捷的编程解决方案,可以直接调用并实现多种功能。本文将围绕硬件配置、输入信号和输出信号展开,详细介绍如何实现各种功能。
首先,我们需要了解硬件配置。本方案使用NJ101-1000和R88D-KN01H系列伺服作为硬件设备。下面我们将介绍各个输入信号和输出信号的功能及应用。
-
使能输入和故障复位
使能输入信号用于控制伺服驱动器的启动和关闭,故障复位信号用于将伺服驱动器从故障状态中恢复正常工作。这两个信号是保证伺服驱动器正常运行的必要条件。 -
点动正转和反转
点动功能可实现伺服驱动器的正转和反转运动,且速度可调节。这一功能在调试和精确控制伺服驱动器位置时非常有用。 -
回原点模式
回原点模式是将伺服驱动器的位置重置为原点的关键步骤。通过安装在伺服驱动器周围的传感器,我们可以确定前极限、原点和后极限的位置。回原点模式的具体流程可以参考图五。在回原点模式中,驱动器会首先以高速开始向后退,直到感应到原点或者后极限信号。然后,驱动器会以慢速向前进,直到离开原点并立即停止,并将当前位置清零。这一过程可以有效确认原点位置。 -
绝对运行
绝对运行模式是在完成回原点模式后才能执行的一种运行模式。在绝对运行模式中,可以根据需要设定速度。这一模式保证了在确定位置的基础上进行运动,提高了定位的准确性。 -
速度设定
回原点模式、点动模式和绝对运行模式均支持速度设定。点动速度、原点快速、原点慢速和绝对速度可以根据具体需要进行调整,以满足不同运动要求。 -
极限开关信号输入
极限开关信号输入可以对伺服驱动器的运动范围进行限制,保证机器设备的安全性。
在输出信号方面,以下功能和状态的信号可以输出:
-
使能状态和故障错误信息
通过使能状态信号和故障错误信息信号,用户可以随时了解伺服驱动器的运行状态和是否发生故障,以便及时采取相应措施。 -
当前速度和当前位置
当前速度和当前位置的信号输出,可以实时监测伺服驱动器的运动状态,为后续运动控制提供基础数据。 -
连锁信号输出
连锁信号输出根据当前运行的模式,提供相应的限制和阻止其他模式运行的信号。例如,在点动前进中,不可执行其他模式;在点动后退中,不可执行其他模式;在原点定位中,不可执行其他模式;在绝对定位中,不可执行其他模式。 -
原点完成信号输出
原点完成信号输出表示伺服驱动器已经完成回原点模式,可以进行后续的运动控制。
通过使用上述功能和信号,我们可以实现直接驱动EtherCAT伺服的目标。这一方案能够满足复杂的运动控制需求,提高生产设备的精度和效率。
总结起来,欧姆龙程序的Sysmac Studio伺服程序打包块能够实现伺服驱动器的多种功能,包括点动运动、回原点模式、绝对运行模式等。通过合理配置输入信号和输出信号,我们可以实现对伺服驱动器的精确控制和运动监测。这一方案为工程师提供了更加便捷的编程和调试方式,提高了工作效率和准确性。希望本文对广大程序员能够有所帮助,为技术交流和进步做出贡献。
相关的代码,程序地址如下:http://coupd.cn/655408672845.html
















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









