






视觉SLAM之VINS-Mono , VINS-Mono是基于紧耦合的VIO状态估计,也是近年来较为成熟且可落地的视觉SLAM解决方案,本商品提供:
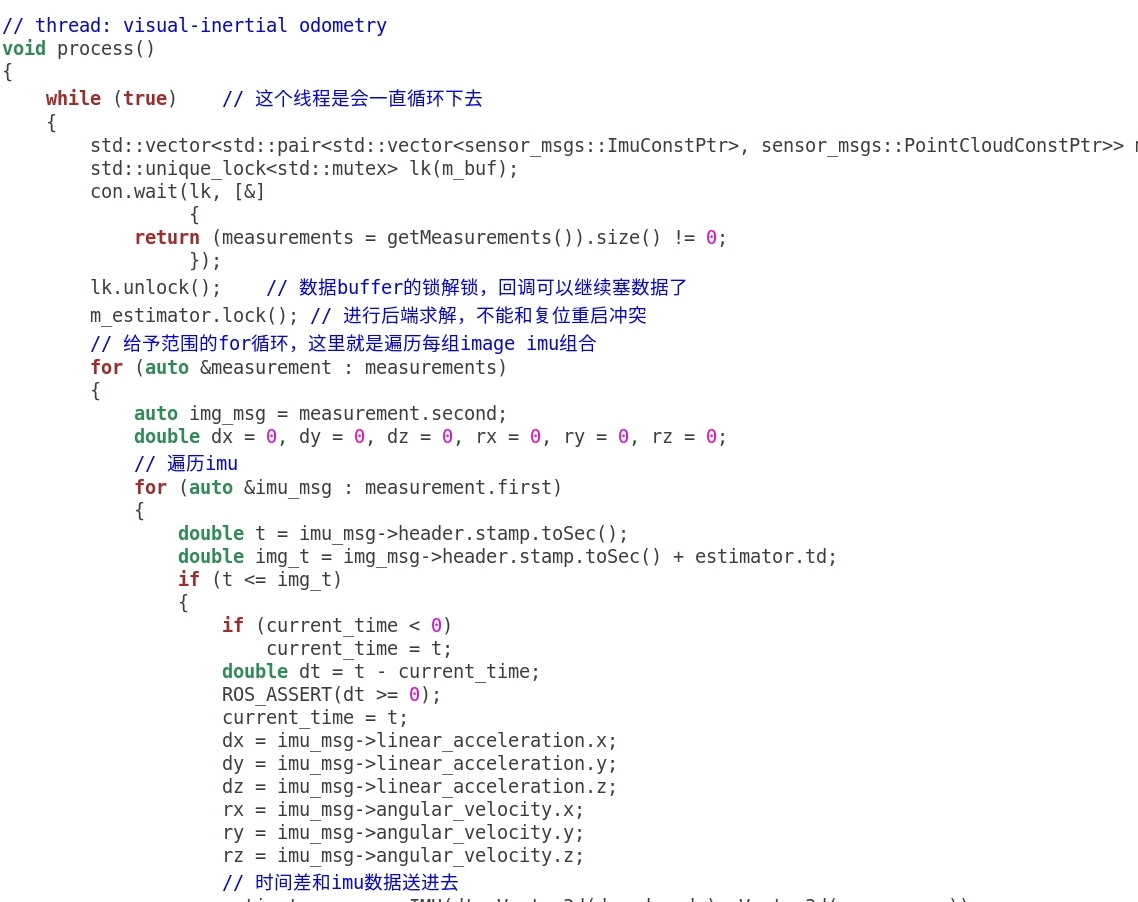
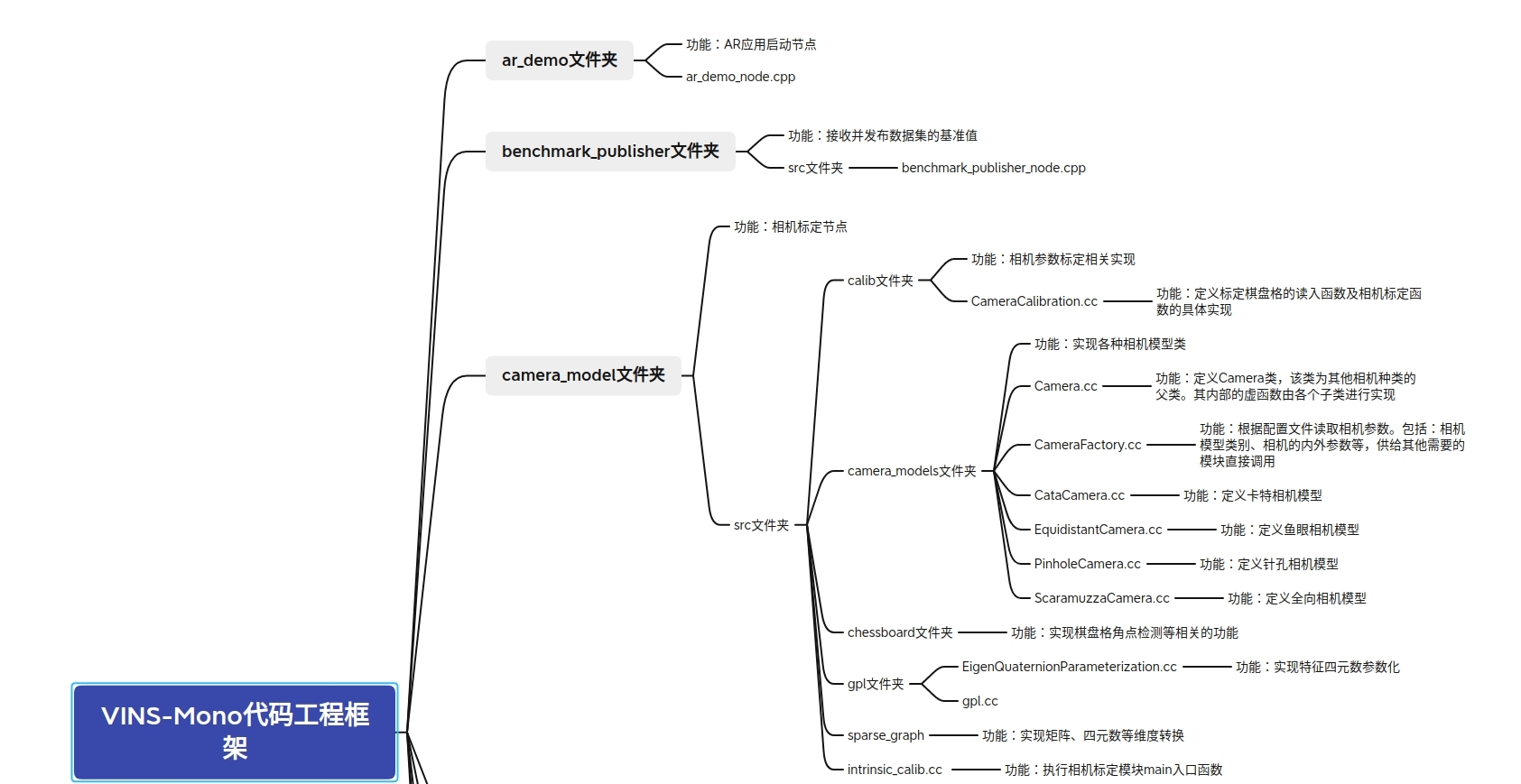
安装环境配置文档及编译运行文档,附带可测试的开源ROS数据包, 代码主干部分带有中文注释,并提供大框架梳理的思维导图。
ID:63100681013796148
肥糯糯的老娘
标题:VINS-Mono:基于紧耦合的VIO状态估计的视觉SLAM解决方案
摘要:本文将介绍VINS-Mono作为一种基于紧耦合的VIO(视觉惯性里程计)状态估计的视觉SLAM(同时定位与地图构建)解决方案。我们将讨论VINS-Mono的安装环境配置和编译运行,并提供附带可测试的开源ROS数据包。此外,我们还将简要介绍VINS-Mono的代码结构以及通过思维导图梳理的大框架。
-
引言
视觉SLAM作为一种在无GPS信号的环境下实现自主定位和地图构建的关键技术,近年来受到了广泛的关注和研究。VINS-Mono作为一种基于紧耦合的VIO状态估计的视觉SLAM解决方案,具有较高的成熟度和可落地性。本文将深入探讨VINS-Mono的技术细节和应用场景。 -
VINS-Mono的环境配置与编译运行
为了在自己的开发环境上配置和运行VINS-Mono,我们需要首先安装和配置相应的依赖项。在本节中,我们将提供详细的环境配置文档,并介绍如何编译和运行VINS-Mono的步骤。此外,我们还将提供一些常见问题的解决方案,以帮助读者更好地理解和应用VINS-Mono。 -
可测试的开源ROS数据包
为了帮助读者深入理解VINS-Mono的工作原理和性能,本文还提供了附带可测试的开源ROS数据包。读者可以通过运行这些数据包,观察VINS-Mono在不同场景下的定位和地图构建效果,并进行相关实验和分析。 -
VINS-Mono的代码结构与思维导图
在本节中,我们将介绍VINS-Mono的代码结构,并通过思维导图对其大框架进行梳理。通过了解VINS-Mono的代码结构和工作流程,读者可以更好地理解其底层原理和算法,并在实践中进行必要的定制和改进。 -
结论
VINS-Mono作为一种基于紧耦合的VIO状态估计的视觉SLAM解决方案,具有广泛的应用前景和研究价值。本文通过介绍VINS-Mono的环境配置和编译运行,提供可测试的开源ROS数据包,并讲解其代码结构和思维导图,希望能够帮助读者更好地理解和应用VINS-Mono,并在相关领域做出贡献。
注:本文所提供的信息仅供参考和学习,读者在实际应用过程中应根据具体情况进行调整和优化。
相关的代码,程序地址如下:http://fansik.cn/681013796148.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









