






龙伯格 luenberger观测器,永磁同步电机无位置传感器控制,simulink模型,使用PLL锁定位置。
ID:775750092750592
俺揍似个弟弟
龙伯格(Luenberger)观测器是一种常用于控制系统中的状态估计器。它通过测量系统的输出和输入,以及对系统动态特性的先验知识,来估计系统的状态。在电机控制中,使用龙伯格观测器可以实现无位置传感器的永磁同步电机控制。本文将以该技术为主题,结合Simulink模型和PLL锁定位置,深入探讨无位置传感器控制的实现原理和应用场景。
首先,我们来了解一下龙伯格观测器的基本原理。龙伯格观测器通过测量系统的输出和输入,以及对系统动态特性进行猜测,来估计系统的状态。在电机控制中,一般通过测量电机的电流和电压来获取电机的状态信息。然而,永磁同步电机并没有位置传感器,无法直接获得转子位置的信息。这时,我们可以利用龙伯格观测器来估计电机转子的位置。
具体来说,龙伯格观测器通过对电机的电流和电压进行采样,并根据电机的动态特性和模型进行状态估计。在永磁同步电机控制中,电机模型可以通过电机的电流方程和电压方程建立。通过对电机模型进行离散化和线性化,可以得到龙伯格观测器的离散时间表达式。
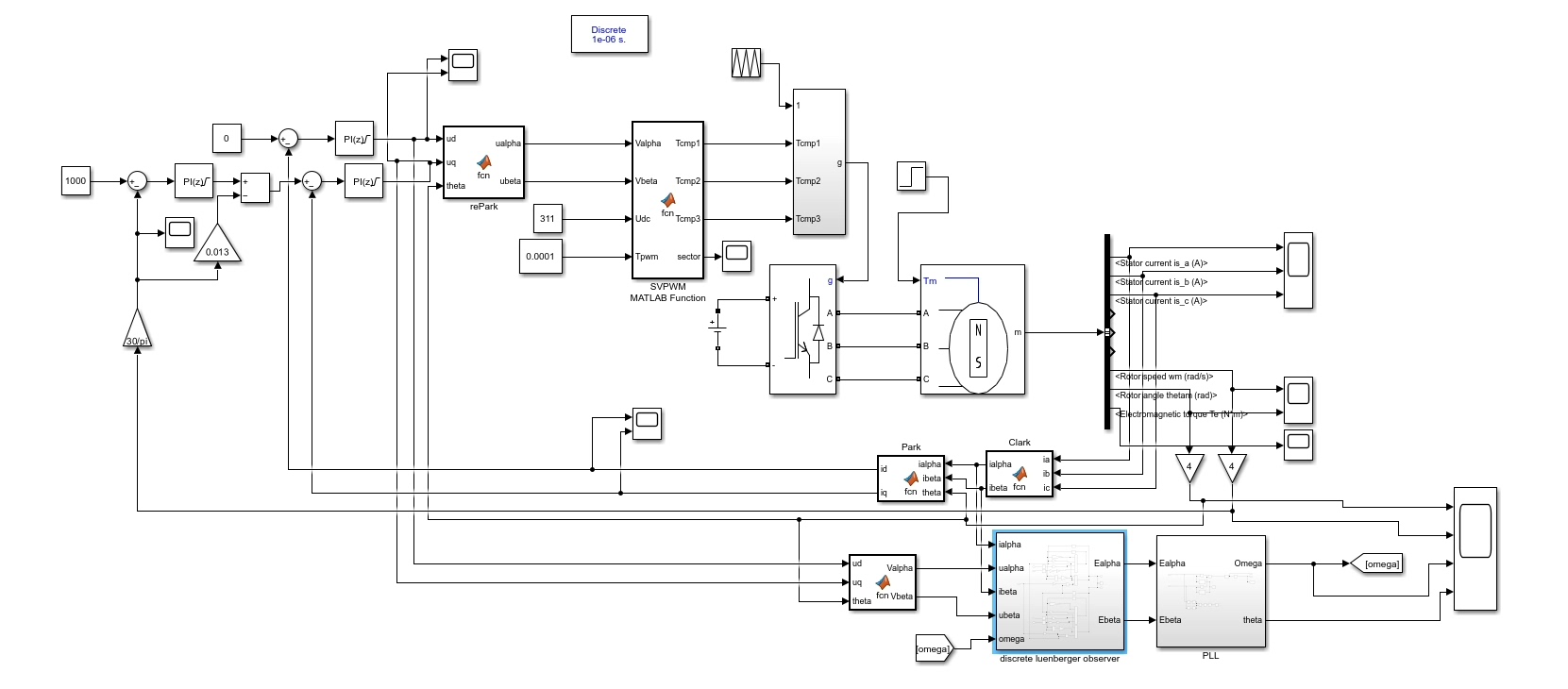
在Simulink中,我们可以建立电机的仿真模型,包括电压源、电流采样、龙伯格观测器和控制器等组件。通过Simulink模型,我们可以模拟永磁同步电机的运行过程,观察龙伯格观测器的性能和控制效果。在仿真过程中,我们可以调整龙伯格观测器的参数,优化观测器的性能,使其能够更准确地估计电机转子的位置。
除了龙伯格观测器,PLL锁定位置也是实现无位置传感器控制的关键技术之一。PLL全称为Phase-Locked Loop,是一种常用的时钟和频率同步技术。在永磁同步电机控制中,通过PLL锁定位置,可以根据电机的电压和电流信息来估计电机转子的位置。
PLL锁定位置的基本原理是通过比较电机的输出信号和参考信号之间的相位差,来实现位置估计。在Simulink模型中,我们可以使用PLL模块来实现PLL锁定位置。通过调整PLL模块的参数,我们可以优化锁定位置的效果,使其能够更准确地估计电机转子的位置。
在实际应用中,无位置传感器控制可以广泛应用于需要高精度和高性能控制的场景。例如,在机器人控制、风力发电系统等领域中,无位置传感器控制可以实现对电机转子位置的准确估计,从而实现更精确的控制。此外,无位置传感器控制还可以降低系统成本,简化系统结构,提高系统可靠性和稳定性。
综上所述,龙伯格观测器和PLL锁定位置是实现无位置传感器控制的重要技术。通过Simulink模型和合理调整参数,我们可以实现对永磁同步电机转子位置的准确估计。无位置传感器控制在实际应用中具有广泛的应用前景,能够提高系统的性能和稳定性。未来,我们可以进一步深入研究和优化无位置传感器控制的算法和方法,以满足不同领域对高精度控制的需求。
以上相关代码,程序地址:http://fansik.cn/750092750592.html
















 702
702











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









