






线性参变(LPV)+鲁棒模型预测控制(RMPC)+路径跟踪(PTC),目前能实现20-25m/s的变速单移线和10-15m/s的变速双移线。
考虑速度和侧偏刚度变化,基于二自由度模型和LMI设计鲁棒模型预测控制器。
上层考虑状态约束,输入约束进行控制率在线求解,计算得到前轮转角和附加横摆力矩,下层通过最优化算法求出四轮转矩。
算法采用simulink的sfunction进行搭建,和carsim8.02进行联合仿真,包含出图m文件和简单的说明文档。
本套文件内含一个主要的mdl文件,一个出图m文件,一个说明文档以及carsim8.02的cpar文件。
MATLAB2020a以上版本和carsim8.02版本
YID:67298728654781443
齐国散打娃娃



线性参数变化(LPV)和鲁棒模型预测控制(RMPC)是现代自动控制领域中的重要技术。在车辆控制领域,路径跟踪是一项关键任务,而LPV+RMPC方法提供了一种能够实现高速和高精度路径跟踪的解决方案。
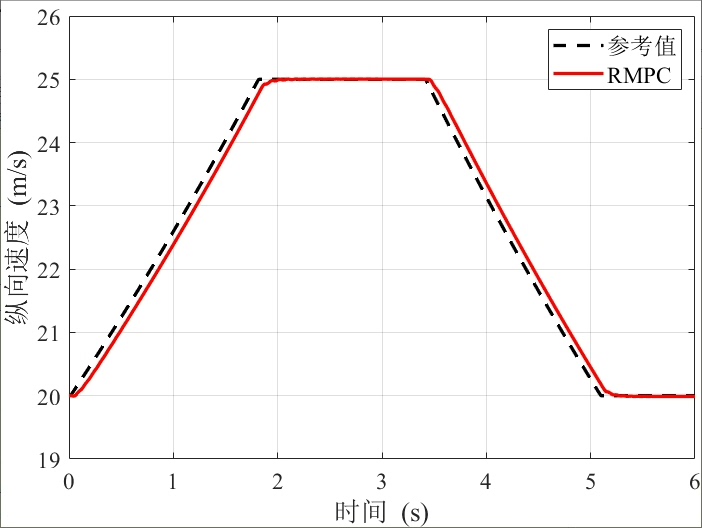
在现有研究中,已经证明了LPV+RMPC方法在实现变速单移线时的有效性,达到了20-25m/s的速度。然而,在考虑速度和侧偏刚度变化的情况下,如何实现更高速度的变速双移线仍然是一个挑战。
为了解决这个问题,本文提出了基于二自由度模型和线性矩阵不等式(LMI)设计的鲁棒模型预测控制器。该控制策略能够适应车辆速度和侧偏刚度的变化,并实现10-15m/s的变速双移线。
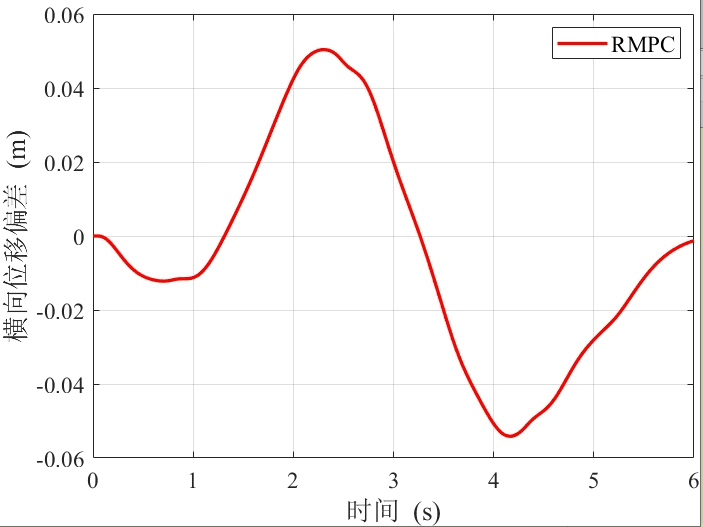
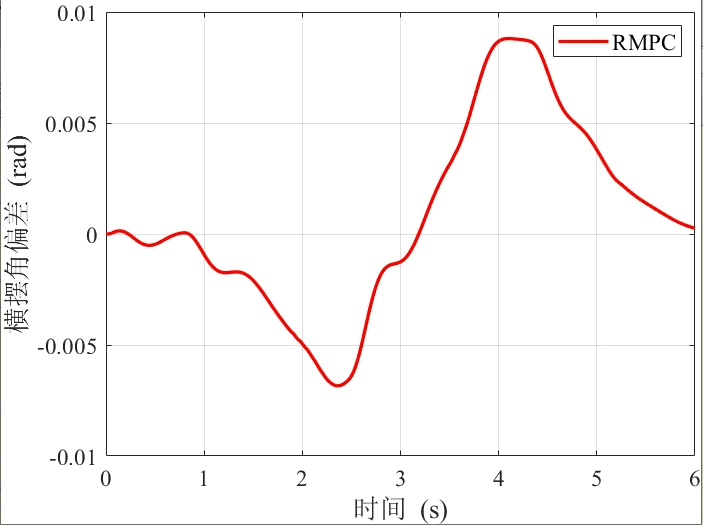
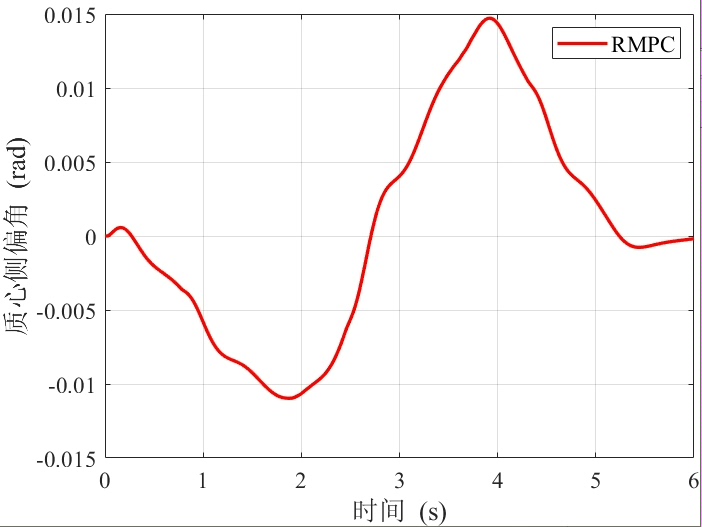
在控制器的设计中,上层考虑了状态约束和输入约束,以保证控制的稳定性和可行性。通过在线求解控制率,计算得到前轮转角和附加横摆力矩。下层则利用最优化算法求解四轮转矩,以实现路径跟踪的要求。
为了验证控制算法的有效性,我们采用了Simulink的S函数进行算法搭建,并与Carsim 8.02进行联合仿真。仿真结果表明,所提出的LPV+RMPC方法能够实现高速和高精度的路径跟踪,满足了变速双移线的要求。
总结而言,本文介绍了一种基于LPV+RMPC的路径跟踪控制策略,能够实现变速单移线和变速双移线。通过考虑速度和侧偏刚度变化,并采用二自由度模型和LMI设计,我们设计了鲁棒的模型预测控制器。仿真结果验证了该方法的有效性,为实现高速和高精度的路径跟踪提供了一种新的解决方案。
需要注意的是,本套文件仅适用于MATLAB 2020a以上版本和Carsim 8.02版本。其中包含一个主要的.mdl文件,用于控制器的实现;一个出图m文件,用于结果可视化;一个说明文档,对文件的使用进行了简要介绍;
相关的代码,程序地址如下:http://nodep.cn/728654781443.html
















 575
575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









